1.本发明涉及地图测绘领域,尤其涉及一种陆上水下地形一体化测图方法和系统。
背景技术:
2.近年来,随着水环境治理修复工程项目精细设计等对大比例尺地形图的需求日益增大。目前大比例尺地形图的测图方法主要靠人工使用gps-rtk、全站仪等设备在野外进行人工数据采集,然后内业加工处理生产。这种作业方式效率较低、时间跨度长、成本高、人工劳动强度大,存在一定的安全风险,生产进度还受到作业期间天气的影响,已远不能满足社会需求。如何提高工作效率、降低生产成本,缩小野外工作量是当今获取大比例尺地形图的迫切要求。
3.由于无人机具有机动灵活、经济便捷等特点,而且能够方便地获取高分辨率影像,因此采用无人机航摄测量大比例尺地形图,成本低、工期短、精度高,能够大幅度减少外业工作量,进而提高生产效率,缩短工期。但是无人机只适合陆上地形数据的采集,无法获取有效的水下地形数据。
4.河道湖泊水域水下地形测量,是工程测量中的一种特定测量,测量江河、湖泊、水库、港湾和近海水下的平面位置和高程,用以绘制水下地形图的测绘工作,主要内容是在陆地建立控制网和进行水下地形测绘。水下地形测绘包括测深点定位、水深测量、水位观测和绘图等等。测深点定位的方法有断面索法、经纬仪或平板仪前方交会法、六分仪后方交会法、全站式速测仪极坐标法、无线电定位法、水下声学定位和差分gps定位法等,水深测量采用测深杆、测深锤和回声测深仪等器具.水底高程是根据水深测量和水位观测成果计算,最后用等深线(或称等高线)表示水底的地形情况。
5.目前,水下地形测量和陆上地形测量是相互独立,因此无法进行有效的融合。
技术实现要素:
6.为了解决上述现有技术中陆上地形测量和水下地形测量相互独立无法融合的缺陷,本发明提出了一种陆上水下地形一体化测图方法和系统。
7.本发明提出了一种陆上水下地形一体化测图方法,可获得同时覆盖陆上和水下的三维地形数据,保证了对真实地形大比例还原的完整性和精确程度。
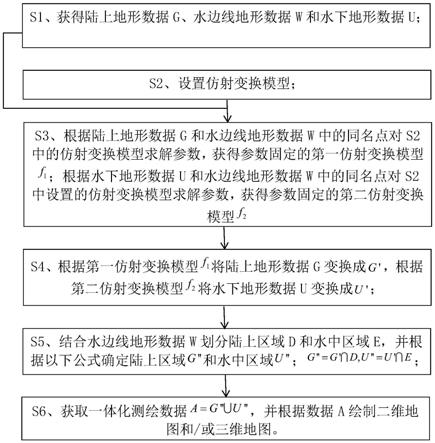
8.一种陆上水下地形一体化测图方法,包括以下步骤:
9.s1、获得陆上地形数据g、水边线地形数据w和水下地形数据u;
10.g={g1、g2、g3、
…
、gm、
…
、gm},1≤m≤m,gm=[x
gm
,y
gm
,z
gm
]
[0011]
w={w1、w2、w3、
…
、wn、
…
、wn},1≤n≤n,wn=[x
wn
,y
wn
,z
wn
]
[0012]
u={u1、u2、u3、
…
、uk、
…
、uk},1≤k≤k,uk=[x
uk
,y
uk
,z
uk
]
[0013]
gm表示陆上测图获得的坐标点,(x
gm
,y
gm
)表示坐标点gm在数字地图上的二维坐标,z
gm
表示高程,m表示陆上测图获得的坐标点数量,m表示坐标点序号;
[0014]
wn表示水边线上测图获得的坐标点,(x
wn
,y
wn
)表示坐标点wn在数字地图上的二维
坐标,z
wn
表示高程,n表示水边线上测图获得的坐标点数量,n表示坐标点序号;uk表示水下测图获得的坐标点;(x
uk
,y
uk
)表示坐标点uk在数字地图上的二维坐标,z
uk
表示高程,k表示水下测图获得的坐标点数量,k表示坐标点序号;
[0015]
s2、设置仿射变换模型;
[0016]
s3、根据陆上地形数据g和水边线地形数据w中的同名点对s2中的仿射变换模型求解参数,获得参数固定的第一仿射变换模型f1;根据水下地形数据u和水边线地形数据w中的同名点对s2中设置的仿射变换模型求解参数,获得参数固定的第二仿射变换模型f2;即:
[0017]
当a、b为同名点指的是a、b对应的实景特征点相同;
[0018]
当gi∈g,w
i'
∈w且gi与w
i'
为同名点,
[0019]
则
[0020]
当uj∈u,w
j'
∈w且uj与w
j'
为同名点,
[0021]
则
[0022]
上式中,i、j、i'、j'均表示序数,1≤i≤m,1≤j≤k,1≤i'≤n,1≤j'≤n;
[0023]
表示陆上地形数据g中第i个测量点gi的三维坐标测量值,表示水边线地形数据w中第i'个测量点表示wi'的三维坐标测量值;
[0024]
表示水下地形数据u中第j个测量点uj的三维坐标测量值,表示水边线地形数据w中第j'个测量点wj'的三维坐标测量值;
[0025]
s4、根据第一仿射变换模型f1将陆上地形数据g变换成g’,根据第二仿射变换模型f2将水下地形数据u变换成u’;
[0026]
即:
[0027][0028]
s5、结合水边线地形数据w划分陆上区域d和水中区域e,并根据以下公式确定陆上区域g”和水中区域u”;
[0029]
g”=g'∩d,u”=u'∩e;
[0030]
s6、获取一体化测绘数据a=g”∪u”,并根据数据a绘制二维地图和/或三维地图。
[0031]
优选的,s2中设置的仿射变换模型为7参数仿射变换模型。
[0032]
优选的,s3中,结合输入输出误差采用最小二乘方法求解仿射变换模型的参数,以固定第一仿射变换模型和第二仿射变换模型。
[0033]
优选的,s2中设置的仿射变换模型如下:
[0034][0035]
其中,(xe,ye,ze)表示采集到的任一数据点的三维坐标,(xe',ye',ze')表示三位坐标(xe,ye,ze)经仿射变换模型变换后的三维坐标;dx为x方向上的平移参数,dy为y方向上的平移参数,dz为z方向上的平移参数;ε
x
为x方向上的旋转参数,εy为y方向上的旋转参数,εz为z方向上的旋转参数,η为尺度变化参数。
[0036]
优选的,水边线地形数据w通过差分gps接收系统测绘获得。
[0037]
优选的,s3中同名点由人工标注。
[0038]
本发明的目的之二提供了一种陆上水下地形一体化测图系统,用于实现上述的陆上水下地形一体化测图方法。
[0039]
一种陆上水下地形一体化测图系统,包括数据接收模块、处理器和存储器,数据接收模块用于获取陆上地形数据g、水边线地形数据w和水下地形数据u,存储器中存储有计算机程序,处理器分别连接数据接收模块和存储器,处理器用于执行所述计算机程序以实现所述的陆上水下地形一体化测图方法。
[0040]
优选的,还包括陆上无人机测绘子系统、水域测绘子系统和差分gps接收系统;
[0041]
陆上无人机测绘子系统用于陆上测绘,获得陆上地形数据g;水域测绘子系统用于水域测绘,获得水下地形数据u;差分gps接收系统用于测绘水边线区域,获得水边线地形数据w;
[0042]
数据接收模块分别连接无人机测绘子系统、水域测绘子系统和差分gps接收系统,以收集无人机测绘子系统采集的陆上地形数据g、水域测绘子系统采集的水边线地形数据w和差分gps接收系统采集的水下地形数据u。
[0043]
本发明的优点在于:
[0044]
(1)当前,陆上地形数据一般采用无人机正射测图获得,水下地形数据一般通过走航或无人船携带的声学设备获取。通过本发明以水边线地形数据为坐标基准,将陆上地形数据和水下地形数据映射到同一坐标系中进行融合统一,最终获得了覆盖陆上和水下的三维地形数据,使得地图测绘更加统一精准。
[0045]
(2)本发明中设计7参数仿射变换模型对陆上地形数据和水下地形数据进行变换,考虑到了坐标数据变换过程中的平移和旋转,从而保证了坐标变换的精准,为最终获得的地图的精准奠定了基础。
[0046]
(3)本发明中,第一仿射变换模型和第二仿射变换模型均基于7参数仿射变换模型获得,有利于变换后的坐标数据的统一;且第一仿射变换模型的参数求解和第二仿射变换
模型的参数求解相互独立,保证了对陆上地形数据和水下地形数据的精准映射。
[0047]
(4)本发明中,水边线地形数据w通过差分gps接收系统测绘获得,通过高精度的水边线地形数据w,保证了对陆上地形数据和水下地形数据的精确变换,从而保证了最终获得的一体化测绘数据a的精确。
[0048]
(5)本发明中,人工标注同名点,然后基于同名点求解第一仿射变换模型和第二仿射变换模型,可靠性高。
[0049]
(6)通过本发明可对任意方式获得的陆上地形数据和水下地形数据进行统一和融合,适用范围广。
附图说明
[0050]
图1为本发明提出的一种陆上水下一体化测图方法流程图;
[0051]
图2为实施例1实验区无人机航拍参数设置图;
[0052]
图2中p表示航向重叠部分,q表示旁向重叠部分;
[0053]
图3(a)为实施例2中水下地形探测平行路线设置图;
[0054]
图3(b)为实施例2中水下地形探测“之”字路线设置图;
[0055]
图4为实施例3中水边线地形测量点布设图;
[0056]
图5为实施例4中不同数据平面及水边线区域同名点示意图;
[0057]
图6(a)为实施例4中的仿射变换后陆上地形数据g”示意图;
[0058]
图6(b)为实施例4中的仿射变换后水下地形数据u”示意图;
[0059]
图6(c)为实施例5中的一体化测绘数据a示意图;
[0060]
图6(d)为实施例5根据一体化测绘数据a构建的3维图。
具体实施方式
[0061]
名词解释:
[0062]
同名点:假设陆上地形数据g中包含陆上测量点a,水边线地形数据w中包含水边线上测量点b,测量点a和测量点b对应实景地图中同一特征点,则测量点a和测量点b为同名点;同理,假设水下地形数据u中包含水下测量点c,水边线地形数据w中包含水边线上测量点d,测量点c和测量点d对应实景地图中同一特征点,则测量点c和测量点d为同名点。
[0063]
本实施方式提供的陆上水下地形一体化测图方法,需要采集陆上地形数据g、水边线地形数据w和水下地形数据u,然后结合图1所示流程图对陆上地形数据g和水下地形数据u进行仿射变换后融合。
[0064]
实施例1:陆上地形数据g的获取
[0065]
本实施例提供的陆上水下地形一体化测图方法主要的适用对象为小型水体,因此本实施例中选择轻小型无人机进行陆上地形数据的采集。
[0066]
本实施例中,陆上地形数据的采集严格遵守空域管制国家相关条例规定,具体飞行参数要求如下:航向重叠度在60%~80%之间,旁向重叠度30%~50%,飞行高度50~120米,地面分辨率值优于20cm,航线设计如图2所示的平行航线,如图2所示,具体实施时航线也可采用“之”字形航线。
[0067]
陆上地形数据g由m个陆上测量点组成,记作:g={g1、g2、g3、
…
、gm、
…
、gm};其中,
gm=[x
gm
,y
gm
,z
gm
],m表示序号,1≤m≤m,gm表示陆上第m个测量点,[x
gm
,y
gm
,z
gm
]表示测量点gm的xyz三维坐标测量值。
[0068]
实施例2:水下地形数据u的获取
[0069]
本实施例中,水下地形数据通过走航或无人船采集,具体选择具有经纬度测量和测深功能的走航或无人船设备,例如携带有测深用声学设备的无人船。具体实施时,无人船现场采集路线需根据采集水体的实际情况布设深度采集航线,推荐航线设置为平行航线(如图3(a))和“之”字形航线(如图3(b))2种类型。
[0070]
水下地形数据由k个水下测量点组成,记作:u={u1、u2、u3、
…
、uk、
…
、uk};其中,uk=[x
uk
,y
uk
,z
uk
],k表示序号,1≤k≤k,uk表示水下第k个测量点,[x
uk
,y
uk
,z
uk
]表示测量点uk的xyz三维坐标测量值。
[0071]
实施例3:水边线地形数据w的获取
[0072]
本实施例中利用差分gps接收系统获取水边线的大地高程,然后通过七参数或者高程拟合法获得测点正常高。关于正常高的测量获取,需按照测绘行业相关操作标准和规范执行,这里重点介绍水边线地形数据采集的布点原则和方法。本实施例中,水边线地形数据测量点布点需均匀分布在测量水体的水边线上,关键拐点及地形变幅较大的区域需加密布设测量点位,测点个数需大于9个,水边线地形数据测量点分布具体可参照图4。水边线高程测量点的数据集即水边线地形数据记为w={w1、w2、w3、
…
、wn、
…
、wn},其中,wn=[x
wn
,y
wn
,z
wn
],1≤n≤n,n表示序数,n表示水边线高程测量点的数量,wn表示水边线上第n个测量点,[x
wn
,y
wn
,z
wn
]表示测量点wn的xyz三维坐标测量值。
[0073]
陆上地形测图、水下地形测图和水边线提取均为本领域的常规技术手段,三者的获取不是本发明的创新点所在,本发明的创新点在于陆上地形测图获得的陆上地形数据g和水下地形测图获得的水下地形数据u的融合。因此,本发明不对陆上地形数据g、水下地形数据u以及水边线地形数据w的获得进行赘述,本领域技术人员应知,本发明提供的陆上水下地形一体化测图方法适用于任何方式获得的陆上地形数据g、水下地形数据u。
[0074]
由实施例1、实施例3可知,由于地形环境不同,陆上测图和水下测图采用的测图方式不同,因此陆上测图和水下测图实际对应的是两种不同的地图体系。本实施例中,以水边线地形数据w为过渡对陆上地形数据g和水下地形数据u进行仿射变换,从而将陆上地形数据g和水下地形数据u映射到同一地图体系中,实现陆上和水下一体化测图。
[0075]
实施例4:仿射模型的建立
[0076]
本实施例中,根据陆上地形数据g和水边线地形数据w中的同名点确定可将陆上地形数据g映射到水边线地形数据w所在三维坐标体系的第一仿射变换模型f1,根据水下地形数据u和水边线地形数据w中的同名点确定可将水下地形数据u映射到水边线地形数据w所在三维坐标体系的第二仿射变换模型f2。
[0077]
第一仿射变换模型f1的求解过程如下:
[0078]
获取陆上地形数据g和水边线地形数据w中的同名点数据集t1,同名点数据集t1由多个数据点对(gi,w
i'
)组成,gi∈g,w
i'
∈w且gi与w
i'
为同名点,
[0079]
则
[0080]
第一仿射变换模型的误差为:
[0081][0082]
本实施例中,第一仿射变换模型采用7参数仿射变换模型,公式(1)具体表示如下:
[0083][0084]
公式(1)中,dx为x方向上的平移参数,dy为y方向上的平移参数,dz为z方向上的平移参数;ε
x
为x方向上的旋转参数,εy为y方向上的旋转参数,εz为z方向上的旋转参数,η为尺度变化参数。
[0085]
结合公式(2)和公式(1-1)可知:
[0086][0087]
结合同名点数据集t1中所有同名点对应的误差(e
xi
,e
yi
,e
zi
),e
xi
、e
yi
、e
zi
分别表示变换前后的坐标点在xyz轴方向上的偏移误差;采用最小二乘法求解公式(1-1)中的7参数,求解结果得:d
x
=d
x1
,dy=d
y1
,dz=d
z1
,η=η1,ε
x
=ε
x1
,εy=ε
y1
,εz=ε
z1
,即确定第一仿射变换模型为:
[0088][0089]
公式(1-2)中,(x
gm
,y
gm
,z
gm
)为陆上地形数据g中测量点gm的三维坐标测量值,(x
gm
',y
gm
',z
gm
')表示测量点gm经过仿射变换后的三维坐标数据,记作gm=(x
gm
,y
gm
,z
gm
),gm'=(x
gm
',y
gm
',z
gm
')。
[0090]
如此,根据以上公式(1-2),可将陆上地形数据g映射到水边线地形数据w的坐标系中,获得与水边线地形数据w共坐标体系的陆上地形数据g',g'={g1'、g2'、g3'、
……
、
gm'}。
[0091]
第二仿射变换模型f2的求解过程:
[0092]
获取水下地形数据u和水边线地形数据w中的同名点数据集t2,同名点数据集t2由多个数据点对(uj,w
j'
)组成,uj∈u,w
j'
∈w且uj与wj为同名点,
[0093]
则
[0094]
第一仿射变换模型的误差为:
[0095][0096]
本实施例中,第二仿射变换模型采用7参数仿射变换模型,公式(3)具体表示如下:
[0097][0098]
公式(3)中,dx为x方向上的平移参数,dy为y方向上的平移参数,dz为z方向上的平移参数;ε
x
为x方向上的旋转参数,εy为y方向上的旋转参数,εz为z方向上的旋转参数,η为尺度变化参数。
[0099]
结合公式(4)和公式(3-1)可知:
[0100][0101]
结合同名点数据集t2中所有同名点对应的误差(e
xj
,e
xj
,e
xj
),e
xi
、e
yi
、e
zi
分别表示变换前后的坐标点在xyz轴方向上的偏移误差;采用最小二乘法求解公式(3-1)中的7参数,求解结果得:d
x
=d
x2
,dy=d
y2
,dz=d
z2
,η=η2,ε
x
=ε
x2
,εy=ε
y2
,εz=ε
z2
,即确定第二仿射变换模型为:
[0102][0103]
公式(3-2)中,[x
uk
,y
uk
,z
uk
]为水下地形数据u中测量点uk的三维坐标测量值,[x
uk
',y
uk
',z
uk
']表示测量点uk经过仿射变换后的三维坐标数据,记作uk=[x
uk
,y
uk
,z
uk
],uk'=[x
uk
',y
uk
',z
uk
']。
[0104]
如此,根据以上公式(3-2),可将水下地形数据u映射到水边线地形数据w的坐标系中,获得与水边线地形数据w共坐标体系的水下地形数据u',u'={u1'、u2'、u3'、
……
、uk'}。
[0105]
具体的,本发明附图所示实施例中根据采集参数具体求解获得的第一仿射变换模型和第二仿射变换模型的参数如下表1所示:
[0106]
表1:附图所示实施例中模型的参数统计表
[0107][0108][0109]
实施例5:陆上地形数据g和水下地形数据u的融合
[0110]
将陆上测图获得的陆上地形数据g经过公式(1-2)所示第一仿射变换模型f1变换为g',g'={g1'、g2'、g3'、
…
、gm'、
…
、gm'},gm'=[x
gm
',y
gm
',z
gm
'],1≤m≤m。
[0111]
将水下测图获得的水下地形数据u经过公式(3-2)所示第二仿射变换模型f2变换为u',u'={u1'、u2'、u3'、
…
、uk'、
…
、uk'},uk'=[x
uk
',y
uk
',z
uk
'],1≤k≤k。
[0112]
如此,陆上地形数据g'和水下地形数据u'处于同一三维坐标系中,为两者的融合奠定了基础。
[0113]
本实施例中,为了保证陆上地形数据g'和水下地形数据u'的精确融合,首先要对陆上地形数据g'和水下地形数据u'进行去重。
[0114]
本实施例中,根据水边线地形数据w确定陆上区域d和水中区域e,并进一步确定陆上地形数据g'中只有属于陆上区域d的数据点才是有效的陆上地形数据,确定水下地形数据u'只有数据域水中区域e的数据点才是有效的水下地形数据。将有效的陆上地形数据记作陆上区域g”,即陆上区域g”由存在于陆上地形数据g且位于水边线地形数据w所围闭合线圈外周或者闭合线圈上的数据点组成,具体可参照图6(a)。将有效的水下地形数据记作水中区域u”,即水中区域u”由存在于水下地形数据u中且位于水边线地形数据w所围闭合线圈内周的数据点组成,具体可参照图6(b)。
[0115]
即:g”=g'∩d,u”=u'∩e
ꢀꢀꢀ
(5)
[0116]
本实施例中最终获得的一体化测绘数据a=g”∪u”,如图6(c)所示。如此,g”中包含的陆上地形数据与u”包含的上下地形数据处于同一坐标系空间即水边线地形数据w所处的坐标系空间,保证最终获得的一体化测绘数据a的基准同一,保证了对真实地形大比例还原的完整性和精确程度;同时,通过公式(5)实现了对融合数据的去重处理,保证了一体化
测绘数据a中测绘点的唯一性,从而进一步保证了一体化测绘数据a的精确可靠。
[0117]
如此,获得一体化测绘数据a后,可根据一体化测绘数据a绘制二维地图和图6(d)所示的三维地图,以实现真实地图的高精度建模复现。
[0118]
实施例6:一种陆上水下地形一体化测图系统
[0119]
本实施例中提出的一种陆上水下地形一体化测图系统,包括数据接收模块、处理器和存储器,数据接收模块用于收集陆上地形数据g、水边线地形数据w和水下地形数据u,存储器中存储有计算机程序,处理器分别连接数据接收模块和存储器,处理器用于执行所述计算机程序以实现所述的陆上水下地形一体化测图方法,从而获得一体化测绘数据a,并根据需求绘制二维地图和三维地图。
[0120]
本实施例中,陆上地形数据g可由陆上无人机测绘子系统提供,陆上无人机测绘子系统可具体实现为测绘无人机。水下地形数据u可由水域测绘子系统提供,水域测绘子系统可具体实现为搭载有声学测深设备的测绘无人船。水边线地形数据w作为参照基准,本实施例中为了保证水边线地形数据w的坐标精确,采用差分gps接收系统测绘水边线区域。数据接收模块分别收集无人机测绘子系统、水域测绘子系统和差分gps接收系统采集的数据,即:陆上地形数据g、水边线地形数据w和水下地形数据u。
[0121]
以上仅为本发明创造的较佳实施例而已,并不用以限制本发明创造,凡在本发明创造的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明创造的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。