1.本发明涉及机器人领域,尤其是涉及一种带有二合一旋转检测装置的爬缆检测机器人。
背景技术:
2.斜拉桥、悬索桥是现代大跨度桥梁的基本形式。斜拉桥、悬索桥建成后,其主要受力构件之一的缆索长期暴露在空气之中,缆索表面的聚乙烯保护层将出现不同程度的硬化老化等破坏现象,缆索内部钢丝束也因空气中的水分和其他酸性物质而受到腐蚀,严重者甚至出现断丝现象,危及桥梁的安全,所以对其进行定期的检测和保养极为重要。
3.传统的检测方式是通过人工巡检对缆索进行检测和保养,但人工巡检的方式工作量大、效率低、难度大、危险高,随着科技的进步,缆索检测机器人可用于代替人工巡检。
4.但是现有的缆索检测机器人无法对缆索进行全面且精准的检测,并且现有检测机器人的重量和体积都较大,不仅操作不便,而且不利于节能。
技术实现要素:
5.本发明主要是针对上述问题,提供一种能够对缆索进行全面且精准的检测,并且重量和体积较小,操作方便,而且有利于节能的带有二合一旋转检测装置的爬缆检测机器人。
6.本发明的目的主要是通过下述方案得以实现的:一种带有二合一旋转检测装置的爬缆检测机器人,包括负重系统和用于在缆索上移动的攀爬系统,所述的负重系统上设置有用于连接攀爬系统的绞车机构,所述的负重系统的一侧设置有用于对缆索进行表观图像检测和漏磁检测的二合一旋转检测装置。负重系统上设置有用于连接攀爬系统的绞车机构,负重系统的远离攀爬系统的一侧设置有用于对缆索进行表观图像检测和漏磁检测的二合一旋转检测装置,具体在工作时,攀爬起步前,负重系统和攀爬系统均先稳定地抱缆卡死,起步时,攀爬系统松开卡缆结构,攀爬系统沿着缆索往上攀爬,攀爬到一定高度后(如20m一个步距),攀爬系统再次抱缆卡死,形成一个固定支点,然后负重系统松开卡缆结构,再依靠绞车机构稳定可靠地提升负重系统和二合一旋转检测装置,与此同时,二合一旋转检测装置边提升边旋转,实现了对缆索表面的螺旋上升式缆索检测状态,有利于完成覆盖缆索直径全周的检测,负重系统提升到位后,再次抱缆卡死,完成一个步距的运动和检测工作,周而复始,实现缆索全长的攀爬检测;机器人在工作时主要重量由负重系统承担,极大减轻了攀爬系统的重量,由此可以大大减小攀爬系统的攀爬摩擦力要求,不仅具有较好的稳定性,而且在检测时的有效性和可靠性都较高;通过二合一旋转检测装置的旋转,可以用更少的漏磁检测单元实现缆索全周的漏磁检测,同时把表观图像检测单元也集成到二合一旋转检测装置中,也可以减少表观图像检测单元内部表观检测相机的数量,从而能够利于机器人重量和体积的减小,并且能够节约能源。
7.作为优选,所述的攀爬系统包括攀爬开合框架,所述的攀爬开合框架由上下对称
设置的两个攀爬机架组成,两个攀爬机架的一侧铰接,两个攀爬机架的另一侧为可拆卸连接,所述的攀爬机架上均对应设置有传动机构、滚轮机构、第一直径自适应机构、第一卡缆机构和加压机构。攀爬机架内设置有加强杆,加强杆对攀爬机架起支撑作用,防止攀爬机架受力变形,攀爬机架采用轻量化钣金结构件,既减轻攀爬机架重量,又保证结构强度,攀爬机架上均对应设置有传动机构、滚轮机构、第一直径自适应机构、第一卡缆机构和加压机构,从而能够较好的在缆索上进行攀爬作业。
8.作为优选,所述的传动机构包括设置在攀爬机架的外侧壁上的驱动电机和第一支撑座,所述的第一支撑座上转动连接有第一传动轴,所述的驱动电机的输出轴和第一传动轴之间通过第一传动带连接,所述的攀爬机架的内侧壁上对应第一传动轴的两端分别设置有第二支撑座,位于第一传动轴的其中一端的第二支撑座同时位于第一传动轴的左侧,位于第一传动轴的另一端的第二支撑座同时位于第一传动轴的右侧,所述的第二支撑座上转动连接有第二传动轴,所述的第二传动轴与第一传动轴之间通过第二传动带连接,所述的滚轮机构包括攀爬轴,所述的攀爬轴上设置有与缆索相配合的攀爬轮,所述的第二传动轴与攀爬轴之间通过第三传动带连接,所述的第二传动轴与攀爬轴之间还连接有第一脚板,所述的攀爬机架的内侧壁上对应第二支撑座设置有第二辅助支撑座,所述的第二辅助支撑座上对应第一脚板设置有第一辅助脚板,所述的第一辅助脚板与攀爬轴的远离第一脚板的一端连接。驱动电机启动时,能够通过第一传动带带动第一传动轴转动,从而使得第一传动轴转动时能够通过第二传动带带动两个第二传动轴同时转动,然后第二传动轴转动能够通过第三传动带带动攀爬轴及攀爬轮同时转动,通过该传动机构的设计,实现了攀爬机架上一个电机同步驱动两个攀爬轮的目的,攀爬轮个数的增加,有利于驱动摩擦力的分担,两个攀爬轮的运动完全同步,可以避免多个攀爬轮之间因速度差异,而产生你拉我拽的内耗行为,从而不会引起明显的攀爬振动现象。
9.作为优选,所述的第一直径自适应机构包括两个呈u型的连接架,一侧的第一脚板和第一辅助脚板之间设置有第一转动轴,另一侧的第一脚板和第一辅助脚板之间设置有第二转动轴,所述的连接架的靠近开口的两侧壁上对应设置有多个调节孔,所述的调节孔内设置有调节轴,所述的连接架的远离调节轴的一侧转动连接有调节螺母,所述的调节螺母内螺纹连接有刻度螺杆,所述的刻度螺杆的远离调节螺母的一端连接在第一转动轴上,所述的调节轴与第二转动轴之间连接有拉簧。不同大小的桥梁,需要使用不同直径的缆索;同一桥梁上不同的安装位置,采用的缆索直径也不相同;同一根缆索上也会因为缆索表面缠绕防震钢丝等造成缆索直径的微动变动,因此爬缆机器人在攀爬过程中必须具有一定范围的缆索直径适应性,在本方案中,通过把调节轴塞入连接架上不同调节孔的孔位,可以实现对不同缆索直径的粗调,通过拉簧的设计,可以实现对缆索直径微动变化的自适应调节,通过调节螺母和刻度螺杆,可以实现攀爬轮对缆索抱缆力的精确微调,抱缆力过大容易加剧攀爬轮与缆索表面的摩擦磨损,加大攀爬功率负载;抱缆力过小,则可能导致攀爬摩擦力不足,容易打滑或滑坠。
10.作为优选,所述的第一卡缆机构包括设置在攀爬机架的内侧壁上的推杆座,所述的推杆座上连接有推动装置,所述的推动装置的输出端连接有推板,所述的推板的两端均连接有拨叉,所述的拨叉上设置有导向槽,所述的导向槽内滑动连接有导向轴,所述的攀爬机架的内侧壁上对应拨叉设置有导向板,所述的导向板上倾斜设置有导向孔,所述的导向
轴滑动连接在导向孔内,所述的导向轴上连接有压杆,两个压杆之间对应设置有呈弧形的压板,所述的压板的内壁上设置有摩擦板。攀爬系统攀爬到一定高度后,需要可靠的抱缆卡死,该第一卡缆机构的基本原理是,推动装置启动时能够通过推板带动拨叉移动,由于导向孔的设置,拨叉在移动时会带动导向轴沿着导向孔的方向移动,导向轴移动时会带动压杆移动,从而通过压杆带动压板和摩擦板移动,通过将上下多个摩擦板配合压紧在缆索上能够形成楔角夹紧作用;导向板上还设置有导轨,拨叉上设置有与导轨滑动连接的滑块,拨叉的运动方向由直线导轨导向。
11.作为优选,所述的加压机构包括设置在攀爬机架的靠近负重系统的一侧的加压座,所述的加压座的两端均转动连接有加压板,两个加压板的远离缆索的一端之间连接有与绞车机构的输出端连接的加压轴,所述的加压轴的两端与加压座的两端之间分别连接有复位弹簧,两个加压板的靠近缆索的一端之间连接有用于压在缆索表面上的加压轮。攀爬系统攀爬到一定位置后,在卡缆机构的作用下,攀爬系统固定在该位置,但是卡缆机构能提供的卡缆力有限,为提高负重系统的负载能力,在攀爬系统上需要增设加压机构,具体工作原理时,在负重系统卡缆不动、攀爬系统爬缆运动时,加压机构在复位弹簧的作用下,加压轮仅与缆索表面轻触,不产生爬缆阻力;当攀爬系统卡缆不动,负重系统在绞车机构作用下,沿着缆索表面进行提升式攀爬时,绞车机构上连接绳的拖拽力带动加压板,使加压轮紧紧压在缆索表面,并且负重拖拽力越大,加压机构卡的越紧,此结构能确保负重提升时,攀爬系统能可靠稳定的固定在缆索上。
12.作为优选,所述的绞车机构包括对应设置在负重系统的上下两端上的绞车电机,所述的绞车电机的输出端连接有缠绕有连接绳的卷筒,所述的连接绳的远离卷筒的一端连接至加压轴上。当绞车电机启动时,绞车电机能够带动卷筒转动,卷筒转动时能够收卷连接绳,从而带动负重系统往攀爬系统方向移动。
13.作为优选,所述的负重系统包括负重开合框架,所述的负重开合框架由上下对称设置的两个负重机架组成,两个负重机架的一侧铰接,两个负重机架的另一侧为可拆卸连接,所述的负重机架的内壁上两两对应设置有四个提升安装板,所述的提升安装板上转动连接有提升脚板,两个相对应的提升脚板之间转动连接有提升轮,所述的负重机架内设置有第二直径自适应机构,所述的第二直径自适应机构与第一直径自适应机构的结构相同,所述的负重机架内还设置有第二卡缆机构,所述的第二卡缆机构与第一卡缆机构的结构相同。当攀爬系统单独攀爬到缆索一定高度并卡缆抱死后,负重系统在绞车机构的作用下,进行提升攀爬,提升轮沿着缆索滚动,整个负重系统提升的速度匀速可控,可以给二合一旋转检测装置提供更好的检测工况。
14.作为优选,所述的二合一旋转检测装置包括两个旋转基板和设置在负重系统上的底板,所述的底板上设置有旋转电机,所述的旋转电机的输出轴连接有主动轴,所述的主动轴上间隔设置有两个主动齿轮,所述的旋转基板由两个呈半环形的端面板围绕缆索拼接而成,所述的端面板的外表面上设置有与主动齿轮相配合的半齿圈,两个旋转基板之间对应且围绕缆索设置有多个表观检测组件和漏磁检测组件,所述的表观检测组件包括设置在两个旋转基板之间的表观安装板,所述的表观安装板的靠近缆索的一侧设置有表观检测相机,两个旋转基板之间围绕表观检测组件和漏磁检测组件设置有遮光布,所述的底板上对应半齿圈设置有限位板。二合一旋转检测装置包括两个旋转基板和设置在负重系统上的底
板,底板上设置有旋转电机,旋转电机的输出轴连接有主动轴,主动轴上间隔设置有两个主动齿轮,旋转基板由两个呈半环形的端面板围绕缆索拼接而成,端面板的外表面上设置有与主动齿轮相配合的半齿圈,两个半齿圈连接时形成一个完整的圆,两个旋转基板之间对应且围绕缆索设置有多个表观检测组件和漏磁检测组件,上半部分的两个端面板和下半部分的两个端面板之间分别装有2个漏磁检测组件与1个表观检测组件,表观检测组件包括设置在两个旋转基板之间的表观安装板,表观安装板的靠近缆索的一侧设置有表观检测相机,两个旋转基板之间围绕表观检测组件和漏磁检测组件设置有遮光布,旋转电机启动时能够带动主动轴转动,主动轴能够带动两个主动齿轮同时转动,两个主动齿轮转动时能够带动相应的半齿圈同时转动,半齿圈在转动时会带动相连的端面板同时转动,端面板转动时能够带动其上的表观检测组件和漏磁检测组件同时围绕缆索作旋转运动,有利于完成覆盖缆索直径全周的检测,底板上对应半齿圈设置有限位板,限位板的数量为4个,限位板的设置既能防止二合一转检检测装置的轴向运动窜动,还能给二合一转检检测装置的周向转动提供导向作用。
15.作为优选,所述的漏磁检测组件包括安装在两个旋转基板之间的固定板,所述的固定板上设置有多个弹簧筒,所述的弹簧筒内设置有压紧弹簧,所述的压紧弹簧的远离弹簧筒的一端连接有活动板,所述的活动板的两端均螺纹连接有定位螺杆,所述的定位螺杆的靠近缆索的一端设置有滚珠,所述的旋转基板上对应活动板设置有导滑槽,所述的活动板的两端均设置有导滑销,所述的导滑销滑动连接在导滑槽内,所述的活动板的靠近缆索的一侧设置有漏磁检测元件。具体的工作原理为,弹簧筒和压紧弹簧的设置能够通过弹簧力把活动板及安装在活动板上的漏磁检测元件压向缆索表面,活动板在移动时,导滑销会沿着导滑槽移动,从而能够起到较好的导向作用;通过调节定位螺杆,可以控制漏磁检测元件与缆索表面的检测间隙大小,该间隙太大时,会影响检测精度,间隙太小时,缆索表面的障碍有可能会与检测单元产生运动干涉。
16.因此,本发明的一种带有二合一旋转检测装置的爬缆检测机器人具备下述优点:本发明的重量和体积较小,操作方便,而且有利于节能,二合一旋转检测装置边提升边旋转,实现了对缆索表面的螺旋上升式缆索检测状态,有利于完成覆盖缆索直径全周的检测。
附图说明
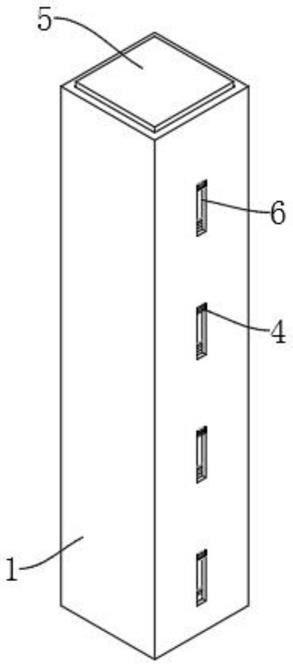
17.附图1是本发明的结构示意图;附图2是本发明的主视图;附图3是本发明中攀爬系统的一个角度的结构示意图;附图4是本发明的攀爬系统的另一个角度的结构示意图;附图5是本发明中攀爬系统去掉其中一个攀爬机架后的结构示意图;附图6是本发明中第一直径自适应机构的结构示意图;附图7是本发明中第一卡缆机构的结构示意图;附图8是本发明中拨叉、导向轴、压杆、压板和摩擦板的结构示意图;附图9是本发明中负重系统和二合一旋转检测装置的一个角度的结构示意图;附图10是本发明中负重系统和二合一旋转检测装置的另一个角度的结构示意图;附图11是本发明中负重系统去掉其中一个负重机架后的结构示意图;
附图12是本发明中二合一旋转检测装置去掉遮光布后的结构示意图;附图13是本发明中漏磁检测组件的结构示意图。
18.图示说明:1-攀爬系统,11-攀爬机架,111-锁扣,112-加强杆,121-驱动电机,122-第一传动带,123-第一支撑座,124-第一传动轴,125-第二传动带,126-第二支撑座,127-第二传动轴,128-第三传动带,129-第一脚板,131-涨紧块,132-涨紧轮,141-攀爬轴,142-攀爬轮,143-滚轮片,151-连接架,152-调节螺母,153-刻度螺杆,154-第一转动轴,155-拉簧,156-第二转动轴,157-调节轴,158-调节孔,161-推杆座,162-推动装置,163-推板,164-拨叉,1641-导向槽,165-导向轴,166-导向板,167-导向孔,168-压杆,1691-压板,1692-摩擦板,171-导轨,172-滑块,181-第二辅助支撑座,182-第一辅助脚板,2-负重系统,21-提升安装板,22-提升脚板,23-提升轮,24-第二直径自适应机构,25-第二卡缆机构,26-负重机架,3-二合一旋转检测装置,31-遮光布,32-端面板,33-半齿圈,34-底板,35-旋转电机,36-主动轴,37-主动齿轮,38-限位板,4-动力电池与电源模块,5-绞车机构,51-连接绳,52-绞车电机,53-卷筒,54-导正板,55-导正孔,56-第二运动监控与测距相机,6-缆索,71-加压座,72-加压板,73-加压轴,74-复位弹簧,75-加压轮,76-第一运动监控与测距相机,8-漏磁检测组件,81-导滑槽,82-导滑销,83-固定板,84-弹簧筒,85-压紧弹簧,86-活动板,87-漏磁检测元件,88-定位螺杆,89-滚珠,91-表观安装板,92-表观检测相机。
具体实施方式
19.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。
20.实施例1:如图1、2所示,一种带有二合一旋转检测装置的爬缆检测机器人,包括负重系统2和用于在缆索6上移动的攀爬系统1,负重系统2上设置有用于连接攀爬系统1的绞车机构5,负重系统2的远离攀爬系统1的一侧设置有用于对缆索6进行表观图像检测和漏磁检测的二合一旋转检测装置3,具体在工作时,攀爬起步前,负重系统2和攀爬系统1均先稳定地抱缆卡死,起步时,攀爬系统1松开卡缆结构,攀爬系统1沿着缆索6往上攀爬,攀爬到一定高度后(如20m一个步距),攀爬系统1再次抱缆卡死,形成一个固定支点,然后负重系统2松开卡缆结构,再依靠绞车机构5稳定可靠地提升负重系统2和二合一旋转检测装置3,与此同时,二合一旋转检测装置3边提升边旋转,实现了对缆索6表面的螺旋上升式缆索6检测状态,有利于完成覆盖缆索6直径全周的检测,负重系统2提升到位后,再次抱缆卡死,完成一个步距的运动和检测工作,周而复始,实现缆索6全长的攀爬检测;机器人在工作时主要重量由负重系统2承担,极大减轻了攀爬系统1的重量,由此可以大大减小攀爬系统1的攀爬摩擦力要求,不仅具有较好的稳定性,而且在检测时的有效性和可靠性都较高,并且能够减少对缆索6表面造成的摩擦损伤;通过二合一旋转检测装置3的旋转,可以用更少的漏磁检测单元实现缆索6全周的漏磁检测,同时把表观图像检测单元也集成到二合一旋转检测装置3中,也可以减少表观图像检测单元内部表观检测相机92的数量,从而能够利于机器人重量和体积的减小,并且能够节约能源;整个机器人在作业时,既可以在二合一旋转检测装置3上升时进行检测,也可以在二合一旋转检测装置3下降时进行检测,并且在上升时二合一旋转检测装置3为正转,在下降时二合一旋转检测装置3为反转,从而能够极大地提高检测时的精准性。
21.如图3、4所示,攀爬系统1包括攀爬开合框架,攀爬开合框架由上下对称设置的两个攀爬机架11组成,两个攀爬机架11的一侧铰接,两个攀爬机架11的另一侧通过锁扣111为可拆卸连接,攀爬机架11内设置有加强杆112,加强杆112对攀爬机架11起支撑作用,防止攀爬机架11受力变形,攀爬机架11采用轻量化钣金结构件,既减轻攀爬机架11重量,又保证结构强度,攀爬机架11上均对应设置有传动机构、滚轮机构、第一直径自适应机构、第一卡缆机构和加压机构,从而能够较好的在缆索6上进行攀爬作业。
22.如图5所示,传动机构包括设置在攀爬机架11的外侧壁上的驱动电机121和第一支撑座123,第一支撑座123上转动连接有第一传动轴124,第一支撑座123的数量为两个,驱动电机121的输出轴和第一传动轴124之间通过第一传动带122连接,攀爬机架11的内侧壁上对应第一传动轴124的两端分别设置有第二支撑座126,位于第一传动轴124的其中一端的第二支撑座126同时位于第一传动轴124的左侧,位于第一传动轴124的另一端的第二支撑座126同时位于第一传动轴124的右侧,第二支撑座126上转动连接有第二传动轴127,第二传动轴127与第一传动轴124之间通过第二传动带125连接,滚轮机构包括攀爬轴141,攀爬轴141上设置有与缆索6相配合的攀爬轮142,攀爬轮142采用多片式结构,攀爬轮142通过不同直径的圆形滚轮片143叠加形成与缆索6表面相适应的弧形滚轮结构,多片式滚轮结构的优点在于,可以根据不同区域的摩擦工况,选择不同材料、不同硬度制造不同部位的滚轮片143,从而实现对攀爬轮142的功能梯度设计;第二传动轴127与攀爬轴141之间通过第三传动带128连接,第二传动轴127与攀爬轴141之间还连接有第一脚板129,第一脚板129上还设置有涨紧块131,涨紧块131的两端对应第三传动带128均转动连接有涨紧轮132,从而实现第三传动带128的涨紧,攀爬机架11的内侧壁上对应第二支撑座126设置有第二辅助支撑座181,第二辅助支撑座181上对应第一脚板129设置有第一辅助脚板182,第一辅助脚板182与攀爬轴141的远离第一脚板129的一端连接,驱动电机121启动时,能够通过第一传动带122带动第一传动轴124转动,从而使得第一传动轴124转动时能够通过第二传动带125带动两个第二传动轴127同时转动,然后第二传动轴127转动能够通过第三传动带128带动攀爬轴141及攀爬轮142同时转动,通过该传动机构的设计,实现了攀爬机架11上一个电机同步驱动两个攀爬轮142的目的,攀爬轮142个数的增加,有利于驱动摩擦力的分担,两个攀爬轮142的运动完全同步,可以避免多个攀爬轮142之间因速度差异,而产生你拉我拽的内耗行为,从而不会引起明显的攀爬振动现象。
23.如图6所示,第一直径自适应机构包括两个呈u型的连接架151,一侧的第一脚板129和第一辅助脚板182之间设置有第一转动轴154,另一侧的第一脚板129和第一辅助脚板182之间设置有第二转动轴156,连接架151的靠近开口的两侧壁上对应设置有多个调节孔158,调节孔158内设置有调节轴157,连接架151的远离调节轴157的一侧转动连接有调节螺母152,调节螺母152内螺纹连接有刻度螺杆153,刻度螺杆153的远离调节螺母152的一端连接在第一转动轴154上,通过转动调节螺母152能够带动刻度螺杆153移动,刻度螺杆153上具有刻度线,能够便于控制刻度螺杆153的移动距离,刻度螺杆153在移动时能够带动第一转动轴154同时移动,从而能够微调攀爬轮142的位置,调节轴157与第二转动轴156之间连接有拉簧155,不同大小的桥梁,需要使用不同直径的缆索6;同一桥梁上不同的安装位置,采用的缆索6直径也不相同;同一根缆索6上也会因为缆索6表面缠绕防震钢丝等造成缆索6直径的微动变动,因此爬缆机器人在攀爬过程中必须具有一定范围的缆索6直径适应性,在
本方案中,通过把调节轴157塞入连接架151上不同调节孔158的孔位,可以实现对不同缆索6直径的粗调,通过拉簧155的设计,可以实现对缆索6直径微动变化的自适应调节,通过调节螺母152和刻度螺杆153,可以实现攀爬轮142对缆索6抱缆力的精确微调,抱缆力过大容易加剧攀爬轮142与缆索6表面的摩擦磨损,加大攀爬功率负载;抱缆力过小,则可能导致攀爬摩擦力不足,容易打滑或滑坠。
24.如图7、8所示,第一卡缆机构包括设置在攀爬机架11的内侧壁上的推杆座161,推杆座161上连接有推动装置162,该推动装置162可以为现有的电动推杆,推动装置162的输出端连接有推板163,推板163的两端均连接有拨叉164,拨叉164上设置有导向槽1641,导向槽1641内滑动连接有导向轴165,攀爬机架11的内侧壁上对应拨叉164设置有导向板166,导向板166上倾斜设置有导向孔167,导向轴165滑动连接在导向孔167内,导向轴165上连接有压杆168,两个压杆168之间对应设置有呈弧形的压板1691,压板1691的内壁上设置有摩擦板1692,攀爬系统1攀爬到一定高度后,需要可靠的抱缆卡死,该第一卡缆机构的基本原理是,推动装置162启动时能够通过推板163带动拨叉164移动,由于导向孔167的设置,拨叉164在移动时会带动导向轴165沿着导向孔167的方向移动,导向轴165移动时会带动压杆168移动,从而通过压杆168带动压板1691和摩擦板1692移动,通过将上下多个摩擦板1692配合压紧在缆索6上能够形成楔角夹紧作用;导向板166上还设置有导轨171,拨叉164上设置有与导轨171滑动连接的滑块172,拨叉164的运动方向由直线导轨171导向。
25.加压机构包括设置在攀爬机架11的靠近负重系统2的一侧的加压座71,加压座71的两端均转动连接有加压板72,两个加压板72的远离缆索6的一端之间连接有与绞车机构5的输出端连接的加压轴73,加压轴73的两端与加压座71的两端之间分别连接有复位弹簧74,两个加压板72的靠近缆索6的一端之间连接有用于压在缆索6表面上的加压轮75,攀爬系统1攀爬到一定位置后,在卡缆机构的作用下,攀爬系统1固定在该位置,但是卡缆机构能提供的卡缆力有限,为提高负重系统2的负载能力,在攀爬系统1上需要增设加压机构,具体工作原理时,在负重系统2卡缆不动、攀爬系统1爬缆运动时,加压机构在复位弹簧74的作用下,加压轮75仅与缆索6表面轻触,不产生爬缆阻力;当攀爬系统1卡缆不动,负重系统2在绞车机构5作用下,沿着缆索6表面进行提升式攀爬时,绞车机构5上连接绳51的拖拽力带动加压板72,使加压轮75紧紧压在缆索6表面,并且负重拖拽力越大,加压机构卡的越紧,此结构能确保负重提升时,攀爬系统1能可靠稳定的固定在缆索6上。
26.如图9所示,绞车机构5包括对应设置在负重系统2的上下两端上的绞车电机52,绞车电机52的输出端连接有缠绕有连接绳51的卷筒53,连接绳51的远离卷筒53的一端连接至加压轴73上,当绞车电机52启动时,绞车电机52能够带动卷筒53转动,卷筒53转动时能够收卷连接绳51,从而带动负重系统2往攀爬系统1方向移动;以往的攀爬方案中,基本都是边爬边检测,其不足之处在于攀爬运动的不稳定性,将会引起图像采集与漏磁检测的抖动工作状态,本实施例中,轻巧的攀爬系统1攀爬到一定高度后(比如20m为一个攀爬步长),紧紧的抱缆卡死形成一个固定的支点,然后负重系统2上的绞车机构5缓慢提升附着在负重系统2上的二合一旋转检测装置3,其提升速度可以根据二合一旋转检测装置3的合理检测速度进行设定,其提升过程也不受攀爬摩擦状态影响,更加稳定;负重系统2上对应卷筒53处设置有导正板54,导正板54上设置有与连接绳51相配合的导正孔55,从而能够对连接绳51起到导向和定位作用。
27.如图11所示,负重系统2包括负重开合框架,负重开合框架由上下对称设置的两个负重机架26组成,两个负重机架26的一侧铰接,两个负重机架26的另一侧为可拆卸连接,负重机架26的内壁上两两对应设置有四个提升安装板21,提升安装板21上转动连接有提升脚板22,两个相对应的提升脚板22之间转动连接有提升轮23,负重机架26内设置有第二直径自适应机构24,第二直径自适应机构24与第一直径自适应机构的结构相同,第二直径自适应机构24与第一直径自适应机构所起到的功能也相同,负重机架26内还设置有第二卡缆机构25,第二卡缆机构25与第一卡缆机构的结构相同,第二卡缆机构25与第一卡缆机构所起到的功能也相同,当攀爬系统1单独攀爬到缆索6一定高度并卡缆抱死后,负重系统2在绞车机构5的作用下,进行提升攀爬,提升轮23沿着缆索6滚动,整个负重系统2提升的速度匀速可控,可以给二合一旋转检测装置3提供更好的检测工况;负重机架26的侧壁上设置有动力电池与电源模块4,从而能够为整个装置提供电力,支撑机器人的运转。
28.如图10、12所示,二合一旋转检测装置3包括两个旋转基板和设置在负重系统2上的底板34,底板34上设置有旋转电机35,旋转电机35的输出轴连接有主动轴36,主动轴36上间隔设置有两个主动齿轮37,旋转基板由两个呈半环形的端面板32围绕缆索6拼接而成,端面板32的外表面上设置有与主动齿轮37相配合的半齿圈33,两个半齿圈33连接时形成一个完整的圆,两个旋转基板之间对应且围绕缆索6设置有多个表观检测组件和漏磁检测组件,上半部分的两个端面板32和下半部分的两个端面板32之间分别装有2个漏磁检测组件8与1个表观检测组件,表观检测组件包括设置在两个旋转基板之间的表观安装板91,表观安装板91的靠近缆索6的一侧设置有表观检测相机92,表观检测相机92为现有的能够进行表观图像检测的装置,两个旋转基板之间围绕表观检测组件和漏磁检测组件8设置有遮光布31,旋转电机35启动时能够带动主动轴36转动,主动轴36能够带动两个主动齿轮37同时转动,两个主动齿轮37转动时能够带动相应的半齿圈33同时转动,半齿圈33在转动时会带动相连的端面板32同时转动,端面板32转动时能够带动其上的表观检测组件和漏磁检测组件8同时围绕缆索6作旋转运动,有利于完成覆盖缆索6直径全周的检测,底板34上对应半齿圈33设置有限位板38,限位板38的数量为4个,限位板38的设置既能防止二合一转检检测装置的轴向运动窜动,还能给二合一转检检测装置3的周向转动提供导向作用。
29.如图13所示,漏磁检测组件8包括安装在两个旋转基板之间的固定板83,固定板83上设置有多个弹簧筒84,弹簧筒84内设置有压紧弹簧85,压紧弹簧85的远离弹簧筒84的一端连接有活动板86,活动板86的两端均螺纹连接有定位螺杆88,定位螺杆88的靠近缆索6的一端设置有滚珠89,旋转基板上对应活动板86设置有导滑槽81,活动板86的两端均设置有导滑销82,导滑销82滑动连接在导滑槽81内,活动板86的靠近缆索6的一侧设置有漏磁检测元件87,漏磁检测元件87为现有的能够进行漏磁检测的装置,具体的工作原理为,弹簧筒84和压紧弹簧85的设置能够通过弹簧力把活动板86及安装在活动板86上的漏磁检测元件87压向缆索6表面,活动板86在移动时,导滑销82会沿着导滑槽81移动,从而能够起到较好的导向作用;通过调节定位螺杆88,可以控制漏磁检测元件87与缆索6表面的检测间隙大小,该间隙太大时,会影响检测精度,间隙太小时,缆索6表面的障碍有可能会与检测单元产生运动干涉,通过该漏磁检测间隙调控方法,可以提高漏磁检测的有效性和可靠性。
30.在本实施例中,在加压座71上还设置有第一运动监控与测距相机76,在导正板54上设置有第二运动监控与测距相机56,其能够起到监控负重系统2侧和攀爬系统1侧的运动
工作情况的作用,还能够进行红外测距,用于标定机器人在缆索6长度上的精准位置。
31.应理解,该实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明讲授的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。