1.本发明属于主动光学领域,具体涉及一种用于高精度修正反射镜面形的主动光学系统。
背景技术:
2.聚焦反射镜是同步辐射束线中的核心元器件,其是缩小光斑尺寸、改善通量密度最简单有效的部件。面形误差是衡量聚焦反射镜品质、决定其性能的重要指标。但由于掠入射角很小,聚焦反射镜的尺度较大(1000mm),要获得面形误差极小的x线聚焦反射镜需要较高的成本,有些在国内甚至无法制作。聚焦反射镜中常用椭圆面形实现点到点的点聚焦,或者是用抛物面形实现准直光束。由于这些镜体的尺度较大,在使用时会受到重力、夹持力等影响,因此它的实际面形与设计面形难以吻合。为了达到镜面的预期面形精度,许多线站都围绕了主动调节的光学仪器展开设计。其中有多种聚焦反射镜多点调节的设计方案。
3.西班牙alba光源制作了一台多点调节的样机。该样机由误差修正和压弯机构两个部分组成。误差修正处使用高精度电机为校正器,可以实现纳米级别的分辨;最小发力增量为0.001n,最大能施加40n的矫正力。压弯机构的压弯力范围为0到500n,可容纳的镜体长范围为300至1500mm,镜体宽度和厚度分别为50mm和20mm。该技术能把聚焦反射镜由于重力引起的斜率误差从0.87μrad(rms)降低至0.115μrad(rms)。法国solei光源的调节机构,中间采用10个电机控制长宽厚分别为350mm、50mm和8mm的反射镜的局部面形;电机有自锁功能,强度范围为
±
30n,重复精度为10mn。调节的椭圆面形范围为p=35m,q=0.3m~∞,其中p表示物距,q代表像距。镜面的斜率误差大约可调节至0.55μrad(rms)。日本spring-8光源通过机械多点调节和压电变形调节相结合的方式来调节镜体,可以达到较高的调节效果。国内光源的多点调节工作较多地局限于理论方面,还没有较为成熟的样机。上海光源中的准直镜压弯系统xafs光束线(bl14w),提出多点调节的重力平衡方法,通过计算得到其平衡力最佳的作用点和大小,计算出用两点、三点和四点调节自重平衡时,面形的均方根误差分别为0.179、0.067和0.032μrad(rms)。
4.上述多点调节装置都是采用电机驱动丝杠等的发力机构,力的作用方式属于超高精度的位移刚性传导,对装配和调试的精度要求高,装配不良时容易导致镜体受力方向并不沿着设计方向。另外,每个点的施力都需要通过调节装置的超高精度位移来实现,调节机构本身的高成本会进一步增加装置整体的成本。
技术实现要素:
5.为了解决上述技术问题,本发明提出了一种用于高精度修正反射镜面形的主动光学系统,通过改变拉线施加的微小拉力来调节镜体反射面的起伏,以达到修正面形的目的。
6.本发明的技术方案为:
7.一种用于高精度修正反射镜面形的主动光学系统,包括拉线滑轮、侧面拉线、侧面锚点、系统支架、限位臂、固定装置、支架锚点、底面拉线、反射镜体、发力组件和镜体下端拉
线锚点;其中,所述限位臂有两个,其上端通过所述固定装置连接固定,下端分别固定在所述系统支架上;所述反射镜体固定在两个所述限位臂之间,通过所述限位臂和固定装置稳定在所述系统支架上;所述反射镜体两侧的每一侧均以相同的间隔均匀地设置有多个所述侧面锚点;多条可独立调节的侧面拉线穿过所述拉线滑轮,并且所述侧面拉线的两端分别连接所述反射镜体两侧对齐的侧面锚点从而形成多组侧面拉线;所述拉线滑轮与所述发力组件相连接,通过所述发力组件调节所述拉线滑轮上的侧面拉线上的施力;所述反射镜体通过均匀间隔设置的多个所述镜体下端拉线锚点连接多条所述底面拉线,所述底面拉线与所述系统支架上的多个所述支架锚点固定连接。
8.进一步地,所述反射镜体两侧的侧面锚点在同一水平面上,且两侧的侧面锚点对齐。
9.进一步地,所述侧面拉线的拉力由所述拉线滑轮进行调节,所述拉线滑轮到两侧的侧面锚点的距离相等,从而保证用一个施力点可对两侧的侧面拉线有相同的拉力。
10.进一步地,每条所述底面拉线垂直向下与均匀设置在所述系统支架上的多个所述支架锚点固定连接,从而形成垂直的多条底面拉线。
11.进一步地,所述侧面拉线和底面拉线为柔性结构;所述侧面拉线和底面拉线均具有拉线受力端子。
12.进一步地,所述侧面锚点和支架锚点均与所述反射镜体粘结为一体。
13.进一步地,所述发力组件为锁紧螺栓,其通过螺杆装配在所述固定装置上,并将调节力传递到所述拉线滑轮上,所述锁紧螺栓设置在所述拉线滑轮顶部,两者通过球状连接件连接。
14.进一步地,所述锁紧螺栓通过所述螺杆的上下移动带动所述拉线滑轮对所述侧面拉线的拉力进行调节。
15.进一步地,还包括面形监测和检测设备和镜面目标值修正控制软件。
16.进一步地,所述发力组件采用永磁铁柱与电磁线圈配合的方式,所述永磁铁柱与电磁线圈利用电流大小控制所述发力组件与所述拉线滑轮之间的电磁力进行施力调节。
17.有益效果:
18.本发明提供了一种用于高精度修正反射镜面形的主动光学系统,采用多数条拉线的结构以形成多点检测,通过每条拉线独立的拉力调节实现对长形反射镜的面形修正,其用于修正调整服役使用中的反射镜的面形,减小实际面形与目标面形的偏差。本发明采用单纯施力的方式调控镜体的面形,让镜体的受力始终沿着拉线方向,不同于传统的通过发力装置位移带来的施力方式。因此本发明不使用超高精度的机械位移器件,使修正面形机构的整体费用比传统方式更加低廉;镜体的支撑、夹持力与调节镜体的面形的拉线力完全解耦,易于镜体的安装调试;系统的边界条件清晰,优化目标明确,有利于进行面形的优化设计。本发明结构简单,不受发力装置安装精度、变形等的影响,具有较高的调节精度和较好的系统稳定性。
附图说明
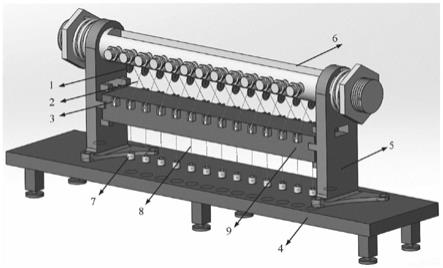
19.图1为本发明的用于高精度修正反射镜面形的主动光学系统示意图;
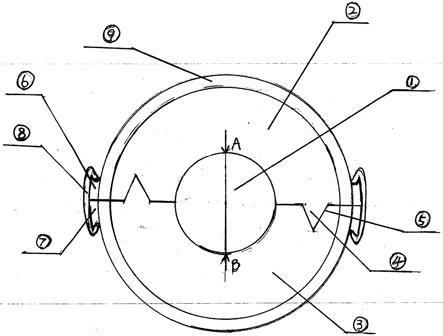
20.图2为用于高精度修正反射镜面形的主动光学系统侧截面剖视图;其中,(a)侧面
拉线施力示意图;(b)底面拉线施力示意图。
21.其中,1-拉线滑轮,2-侧面拉线,3-侧面锚点,4-系统支架,5-限位臂,6-固定装置,7-支架锚点,8-底面拉线,9-反射镜体,11-发力组件,12-镜体下端拉线锚点。
具体实施方式
22.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。附图中相同的标号始终表示相同的部件。
23.如图1所示,本发明的用于高精度修正反射镜面形的主动光学系统包括拉线滑轮1、侧面拉线2、侧面锚点3、系统支架4、限位臂5、固定装置6、支架锚点7、底面拉线8、反射镜体9、发力组件11和镜体下端拉线锚点12。所述限位臂5有两个,其上端通过所述固定装置6连接固定,下端分别固定在所述系统支架4上。所述反射镜体9固定在两个所述限位臂5之间,通过所述限位臂5和固定装置6稳定在所述系统支架4上。所述反射镜体9两侧的每一侧均以相同的间隔均匀地设置有多个所述侧面锚点3,两侧的侧面锚点3在同一水平面上,且两侧的侧面锚点3对齐。多条可独立调节的侧面拉线2穿过所述拉线滑轮1,并且所述侧面拉线2的两端分别连接所述反射镜体9两侧对齐的侧面锚点3从而形成多组侧面拉线2。所述侧面拉线2的拉力由所述拉线滑轮1进行调节,所述拉线滑轮1到两侧的侧面锚点3的距离相等,从而保证用一个施力点可对两侧的侧面拉线2有相同的拉力。所述拉线滑轮1与所述发力组件11相连接,通过所述发力组件11调节所述拉线滑轮1上的侧面拉线2上的施力。所述反射镜体9的底面轴线上均匀连接多条所述底面拉线8,每条所述底面拉线8垂直向下与均匀设置在所述系统支架4上的多个所述支架锚点7固定连接,从而形成垂直的多条底面拉线8。
24.所述主动光学系统还包括面形监测和检测设备和镜面目标值修正控制软件。
25.优选的,所述侧面拉线2和底面拉线8为柔性结构,使修正面形所需要的施力与发力组件的位移和变形分离开,实现比较理想的面形修正机制。所述侧面拉线2和底面拉线8均具有拉线受力端子。所述侧面锚点3和支架锚点7均与所述反射镜体9粘结为一体。
26.优选的,所述发力组件11为锁紧螺栓,其通过螺杆装配在所述固定装置6上,并将调节力传递到所述拉线滑轮1上。所述锁紧螺栓与所述拉线滑轮1的连接处设置球状连接件以保证所述锁紧螺栓旋转时,所述拉线滑轮1能够保持方向。所述侧面拉线2通过所述拉线滑轮1顶部的与所述螺杆连接的锁紧螺栓的旋拧从而调节拉力。所述旋拧通过手动或自动的方式实现。所述发力组件11通过螺杆的上下移动带动所述拉线滑轮1对所述侧面拉线2进行调节。必要时可在所述侧面拉线2上安装传感器实时监控拉力。
27.优选的,所述发力组件11采用永磁铁柱与电磁线圈配合的方式,所述永磁铁柱与电磁线圈则利用电流大小控制其与所述拉线滑轮1之间的电磁力大小进行施力调节,必要时可在所述侧面拉线2上安装传感器实时监控拉力。所述电磁线圈缠绕在永磁铁柱上,通过改变所述电磁线圈上电流的大小和方向来调节所述永磁铁柱上磁力的大小与方向。所述永磁铁柱与电磁线圈可以替换螺杆的调节功能,所述永磁铁柱的磁力大小可以改变所述拉线滑轮到所述永磁铁柱的距离,从而对拉线滑轮施加调节拉力。为了保证滑轮的直线运动,可
以在所述拉线滑轮1的固定端和所述永磁铁柱之间加一个套筒。
28.优选的,所述反射镜体9的材料是可用做反射镜的任意材料。
29.本发明的主动光学系统的面形修正过程为:当所述面形监测和检测设备测量出所述反射镜体9的面形不满足设计要求时,将所述反射镜体9上各区段的位移信息反馈给镜面目标值修正反馈控制组软件,计算得到目标面形所需要的每条侧面拉线2和底面拉线8的拉力调整值。最终的拉力大小由多条侧面拉线2和底面拉线8控制。所述侧面拉线2的拉力大小通过控制所述拉线滑轮1的上下运动来进行调节,而所述底面拉线8的施力大小则可以通过调节所述支架锚点7的上下位移来改变。
30.优选的,所述面形监测和检测设备用于监测和检测反射镜体9在多条所述侧面拉线2和底面拉线8形成的多点外力作用下产生的面形变化,并将面形信息传递至镜面目标值修正控制组件。
31.优选的,所述镜面目标值修正控制组件根据处理演算结果给出所述侧面拉线2和底面拉线8的新修正调整值,直至镜面目标值修正量收敛到预期范围内。
32.本发明通过在所述反射镜体9的底面中线和反射镜体9的侧面靠近镜面位置处等距设置点位实现侧面拉线2和底面拉线8的多个锚点的设置,锚点的点数还需要通过优化算法进一步确定。面形的检测可以通过长程面形仪(ltp)或者激光干涉仪沿着所述反射镜体9的长度方向扫描得到面形的高度及高度误差。通过每点的拉力作用对反射镜体9的镜面产生的位移可以计算得到镜面的响应面函数,每点的响应面函数是线性无关的,因此可以利用线性叠加的方法修正实际面形与目标面形之间的误差。图2具体给出了侧面拉线2和底面拉线8的施力方法。所述底面拉线8是通过所述支架锚点7处的螺栓进行调节,所述侧面拉线2则通过所述拉线滑轮1顶部的锁紧螺栓进行旋拧调节。当然本发明并不局限于螺栓调节,也可采用电磁场的吸力、斥力或者调节杠杆等其它的方式实现。
33.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。