技术特征:
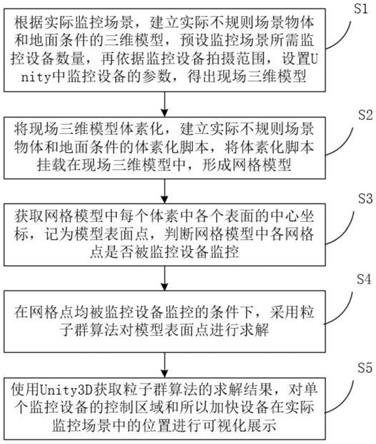
1.一种基于unity3d视频监控可视化布局优化的方法,其特征在于,包括以下步骤:步骤1:根据实际监控场景,建立实际不规则场景物体和地面条件的三维模型,预设监控场景所需监控设备数量,再依据监控设备拍摄范围,设置unity中监控设备的参数,得出现场三维模型;步骤2:将现场三维模型体素化,建立实际不规则场景物体和地面条件的体素化脚本,将体素化脚本挂载在现场三维模型中,形成网格模型;步骤3:获取网格模型中每个体素中各个表面的中心坐标,记为模型表面点,判断网格模型中各网格点是否被监控设备监控;步骤4:在网格点均被监控设备监控的条件下,采用粒子群算法对模型表面点进行求解;步骤5:使用unity3d获取粒子群算法的求解结果,对单个监控设备的控制区域和所以加快设备在实际监控场景中的位置进行可视化展示。2.根据权利要求1所述的一种基于unity3d视频监控可视化布局优化的方法,其特征在于,所述步骤3中,现场三维模型体素化后,将体素化脚本挂载在现场三维模型前,还需剔除中心坐标重复的体素,只保留物体表面的体素数据。3.根据权利要求1所述的一种基于unity3d视频监控可视化布局优化的方法,其特征在于,所述步骤4中,判断网络模型中网格点是否被监控设备监控的方法包括以下步骤:步骤41:判断是否存在监控设备可视范围外的网格点,若是,则进入步骤42,若否,则进入步骤43;步骤42:网格点未均被监控设备监控;步骤43:在unity中,从监控设备点向监控点发射射线,判断射线途中是否有穿过物体,若是,则进入步骤42,若否,则进入步骤44;步骤44:计算监控设备视线向量与被监控平面法向量的夹角,判断夹角是否在监控设备范围内,若是,则进入步骤45,若否,则进入步骤42;步骤45:网格点均被监控设备监控。4.根据权利要求1所述的一种基于unity3d视频监控可视化布局优化的方法,其特征在于,所述步骤5中,采用粒子群算法对集合进行求解时,还包括以下步骤:步骤51:将模型表面点建立成集合,根据集合建立粒子数目为n的粒子群,设每个粒子的维度为场景所需的监控设备数量m;步骤52:设定目标函数为m个监控设备所监控的网格点的覆盖率,进行迭代运算;步骤53:重复迭代运算,直到达到停止迭代条件,输出求解结果。5.根据权利要求4所述的一种基于unity3d视频监控可视化布局优化的方法,其特征在于,所述步骤52所述覆盖率具体为:模型覆盖率=被监控点的数目/所有模型表面的点的数目。6.根据权利要求4所述的一种基于unity3d视频监控可视化布局优化的方法,其特征在于,所述步骤53停止迭代条件为模型覆盖率达到最低。7.根据权利要求4所述的一种基于unity3d视频监控可视化布局优化的方法,其特征在于,所述迭代运算具体为:v
i
=v
i
c1×
rand()
×
(pbest
i-x
i
) c2×
rand()
×
(gbest
i-x
i
)
x
i
=x
i
v
i
其中,i=1,2,...,n,n是此群中粒子的总数,v
i
是粒子的速度,rand()是介于(0,1)之间的随机数,x
i
是粒子的当前位置,c1,c2是学习因子,通常均设为1,pbest
i
是历史最优位置,gbest
i
是全局最优位置。
技术总结
本发明公开了一种基于Unity3D视频监控可视化布局优化的方法,涉及视频监控布局领域,本发明针对实际工程中,视频监控设备布置不合理,利用Unity3D建模软件和粒子群算法相结合,得出在视频监控设备数目一定的情况下,视频监控设备覆盖率最大的优化布局结果,并能通过Unity3D展示出每个视频监控设备控制范围和安装位。装位。装位。
技术研发人员:范荣全 杨昌建 何鑫 王滨 黄剑波 刘俊勇 赵星俨 唐杨 王迪 杨江平 唐刚
受保护的技术使用者:国网四川省电力公司眉山供电公司
技术研发日:2021.12.06
技术公布日:2022/5/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。