1.本发明属于陆地与水下直流电探测技术领域,尤其涉及一种基于陆地与水 下直流电联合测量的地质反演方法。
背景技术:
2.迄今为止,直流电的正反演方法与理论较为成熟,地面直流电法应用广, 相对稳定。但是,纵观目前的进展,将陆地与水下直流电联合测量与反演的方 法研究很少,技术还不完备。水库、水电工程坝体安全检测受限于常规方法的 局限亟需突破,开展考虑动水环境的陆地与水下直流电联合测量与反演方法研 究尤为重要。
技术实现要素:
3.本发明提供一种基于陆地与水下直流电联合测量的地质反演方法,旨在解 决上述存在的问题。
4.本发明是这样实现的,一种基于陆地与水下直流电联合测量的地质反演方 法,包括以下步骤:
5.s1:在目标地域中排列布置电极,所述目标地域包括水域,所述水域两侧 分别为陆地,电极排列从一侧陆地逐步向水域底部布置,直至布置到另一侧陆 地上;
6.s2:采用声呐探测装置,确定水域中水体的空间分布,并采集水域不同深 度及不同点位的水样进行分析,确定水体的电阻率空间分布结构,建立水域中 水体及水底地形起伏三维模型;
7.s3:根据陆地及水域底部的电极布置,采用温纳装置或偶极-偶极装置变换 供电电极与接收电极位置,建立不同供电-接收观测系统,获取观测数据;
8.s4:对观测数据进行预处理,去除观测数据中去掉不正常的数据点;
9.s5:根据预处理后的观测数据,获取视电阻率拟断面图,分析视电阻率拟 断面图,初步判断目标地域中地下地质情况;
10.s6:根据目标地域中水体及地质特点建立不同地质模型,进行二、三维正 演模拟计算分析,其中,整个正演模拟计算区域采用非结构化三角单元或四面 体单元进行二、三维网格剖分;
11.s7:根据水域中水体及水底地形起伏三维模型,建立包含三维水体电阻率 结构的初始模型,并使用非结构化三角单元或四面体单元进行网格剖分,以实 现二、三维反演。
12.进一步的,在步骤s3中,采用温纳装置或偶极-偶极装置变换供电电极与 接收电极位置具体包括:采用电极a、b、m、n四个电极,电极a为正极, 电极b为负极,电极m和电极n为测点电极;将电极a、电极b、电极m和 电极n不断地变换位置,从而向地下不同深度输入电流,并获得当前测点电极 m、n的电位差;记录每次变换的电极a、电极b、电极m和电极n位置、电 流及电压,最终视电阻率按以下方式计算:
[0013][0014]
其中,δu
mn
为m、n测量电极对之间的电位差,i为测量电流,k为装置 系数,温纳装置、偶极-偶极装置的装置系数k具体计算法则分别为:
[0015][0016][0017]
其中,am、an、bm、bn、mn分别为各电极之间的距离。
[0018]
进一步的,在步骤s4中,对观测数据进行预处理具体包括:首先对观测数 据进行傅里叶变换,分析动水对电极位置的扰动以及数据的影响,并对同一个 观测点随时间的变化数据进行滤波处理;之后做傅里叶反变换,叠加观测点随 时间变化的数据,并求均值与方差,进一步整理为视电阻率数据,对各点的视 电阻率数据进行编辑,去掉超出正常范围的数据。
[0019]
进一步的,在步骤s5中,获取视电阻率拟断面图具体包括:对于温纳装置 而言,以电极a和电极b之间距离的一半为纵轴,电极m和电极n之间中心 点为测点横向位置,获取视电阻率拟断面图;对偶极-偶极装置而言,电极a、 b之间中点与电极mn之间中点的距离一半为纵轴,测量装置中心点为测点横 向位置,获取视电阻率拟断面图。
[0020]
进一步的,在步骤s6中,进行二、三维正演模拟计算分析具体包括:设置 水体均匀电阻率,水底以下不规则异常体电阻率,其余部分为特定的背景电阻 率;
[0021]
二维与三维电位计算方程分别如下:
[0022]
‑▽
[σ(x,z)
▽
φ(x,y,z)]=i(x,y,z)
[0023]
‑▽
[σ(x,y,z)
▽
φ(x,y,z)]=i(x,y,z)
[0024]
其中,σ(x,z)为电导率的二维分布,σ(x,y,z)为电导率的三维分布,
▽
φ(x,y,z) 为电位的三维分布,i(x,y,z)为一个电流源项;
[0025]
利用有限单元法离散上式,得到一个线性方程组:
[0026]
kv=s
[0027]
其中,k为稀疏矩阵,包含网格单元几何信息以及电阻率结构信息,v为 待求解向量,s为右端项;
[0028]
进一步利用向量v以及插值矩阵,获得计算空间内任意测点位置的视电阻 率值。
[0029]
进一步的,在步骤s7中,具体包括:
[0030]
设定反演目标函数:
[0031][0032]
其中,m为所有电阻率参数组成的列向量,λ为正则化因子,为数据 目标函数,为模型目标函数;
[0033][0034]
其中,δd为观测数据与正演数据的残差向量,wd为数据加权矩阵;
[0035]
wd=diag{1/σ1,1/σ2,...1/σj...1/σm}
[0036]
其中,数据加权矩阵为一个对角矩阵,对角元素为每个数据方差的倒数;
[0037][0038]
其中,wm为模型协方差矩阵,用于控制模型在横向和纵向的光滑程度, 该矩阵使用梯度算子或拉普拉斯算子对局部模型约束。
[0039]
进一步的,在步骤s7中,反演方法采用高斯牛顿法,具体包括:
[0040]
s71:选择初始电阻率模型m0,设定反演最大迭代次数,以及最小拟合差;
[0041]
s72:求解线性方程组获得迭代的更新方向pk;
[0042]
s73:设定一个初始步长,并开始一维线性搜索,寻优当前迭代的模型更新 步长α,并按如下公式更新模型:
[0043]mk 1
=mk αpk[0044]
s74:若当前拟合差小于最小阀值,或迭代次数已经大于最大迭代次数,则 终止反演;若上述条件都未满足,则跳至第二步,开始新的迭代;
[0045]
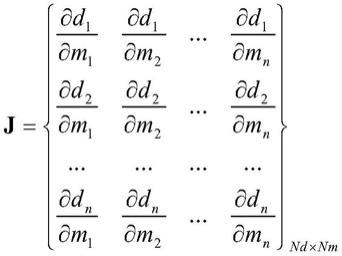
在线性方程组中,包含如下灵敏度矩阵:
[0046][0047]
其中,灵敏度矩阵的元素为不同观测数据关于模型参数的偏导数,该矩阵 为一个满秩矩阵;
[0048]
反演流程中,拟合差按如下计算:
[0049][0050]
进一步的,在反演过程中,λ通过以下机制调整:
[0051]
当反演拟合差难以下降时,λ缩小为原来的十分之一;
[0052]
当线性搜索难以找到合适的更新步长时,λ缩小为原来的十分之一。
[0053]
与现有技术相比,本发明的有益效果是:本发明基于直流电联合测量,从 实际角度出发,设计了多个技术要点,包括:从陆地到水中的递进式测量方法, 有效控制岸边到深水区的地质情况;消除动水对电极扰动的影响;建立水库模 型,消除水体对地下介质反演的影响。
附图说明
[0054]
图1为本发明提供的陆地-水下-陆地电极整体布置示意图;
[0055]
图2为本发明提供的实施方案流程图;
[0056]
图3为本发明实施例提供的电极布置示意图;
[0057]
图4为本发明实施例提供的声呐探测示意图;
[0058]
图5为本发明实施例提供的供电电极与测量电极移动示意图;
[0059]
图6为本发明实施例提供的电阻率正演模型;
[0060]
图7为本发明实施例提供的正演网格剖分示意图;
[0061]
图8为本发明实施例提供的视电阻率拟断面图;
[0062]
图9为本发明实施例提供的反演结果一;
[0063]
图10为本发明实施例提供的反演网格剖分;
[0064]
图11为本发明实施例提供的反演结果二;
[0065]
图12为本发明实施例提供的反演结果三。
具体实施方式
[0066]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实 施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅 仅用以解释本发明,并不用于限定本发明。
[0067]
在本发明的描述中,需要理解的是,术语“长度”、“宽度”、“上”、
ꢀ“
下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、
ꢀ“
底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置 关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或 元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发 明的限制。此外,在本发明的描述中,“多个”的含义是两个或两个以上,除 非另有明确具体的限定。
[0068]
实施例1
[0069]
如图1所示,为实现从岸边逐渐向深水处过度,从而达到有效控制水体下 方及周围相关地质体的目的,本发明首先要求电极排列从陆地逐步向水中布置, 并再次布置到陆地上;
[0070]
为降低水体对反演的影响,本发明要求在设计观测系统及反演前,需要采 用声呐装置,控制当前整个工区的水体及水底地形起伏三维模型,并采集不同 深度及不同点位的水样品,分析水体的电阻率三维分布,以及是否存在明显的 电阻率宏观分层。
[0071]
按照图1所示的陆地及水下电阻率布置,可以采用温纳装置或偶极-偶极装 置等变换供电电极与接收电极位置,建立不同供电-接收观测系统,从而达到更 精准的地质识别能力。
[0072]
由于水流及地下电流的影响对数据的影响,必须在观测数据中去掉不正常 的数据点。首先进行傅里叶变换,分析动水对电极位置的扰动以及数据的影响, 并对同一个观测点随时间的变化数据进行滤波处理。之后做傅里叶反变换,叠 加观测点随时间变化的数据,并求均值与方差,进一步整理为视电阻率数据, 对各点的视电阻率数据进行编辑,去掉超出正常范围的数据。
[0073]
对温纳装置而言,以电极a和电极b之间距离的一半为纵轴,电极m和 电极n之间中心点为测点横向位置,获取视电阻率拟断面图;对偶极-偶极装置 而言,电极a、b之间中点与电极m、n之间中点的距离一半为纵轴,测量装 置中心点为测点横向位置,获取视电阻率拟断面图。根据成像结果,切出不同 位置的水平切片与垂直切片,可初步判断渗漏点位置。
并为正演模拟分析与反 演计算,提供初始模型,减小反演多解性。
[0074]
为适应复杂地形,本发明要求使用三角形或四面体非结构化单元进行网格 剖分。此外,根据当前工区水体及地质特点建立不同地质模型,进行二、三维 正演模拟分析,初步判断当前观测系统的实际分辨能力。
[0075]
为消除水体对反演的影响,本发明要求根据水体及水底三维结构,建立包 含三维水体电阻率结构的初始模型,并使用三角形或四面体非结构化单元进行 网格剖分,以实现二、三维反演。反演前标记水体电阻率结构及地形起伏,在 反演中作为固定参数,不参与模型修改。
[0076]
本发明基于直流电联合测量,从实际角度出发,设计了多个技术要点,包 括:从陆地到水中的递进式测量方法,有效控制岸边到深水区的地质情况;消 除动水对电极扰动的影响;建立水库模型,消除水体对地下介质反演的影响。
[0077]
实施例2
[0078]
如图2所示,本发明公开一种基于陆地与水下直流电联合测量的地质反演 方法,包括以下步骤:
[0079]
1、陆地-水下-陆地电极布置
[0080]
如图3所示,图中纵向z代表高程,横向x代表水平距离。需要将电极从 陆地布置到水下,再布置到陆地上,水下电极与水底面接触,水深约1.5米, 电极从左岸度过水下,一直布设到右岸。
[0081]
2、建立水体模型
[0082]
如图4所示,根据声呐探测结果,确立水体空间分布;根据gps测定,获 取实际水面、水体的高程;根据水区不同点位和深度的水样分析,确定水体总 体的电阻率空间分布结构。
[0083]
若水体存在明显的宏观电阻率分层现象,还需建立具有分层结构的水体电 阻率结构,以便更精确的在正反演中去除水的影响。
[0084]
3、建立观测系统
[0085]
按照图1所示的陆地及水下电阻率布置,可以采用温纳装置、偶极-偶极装 置等变换供电电极与接收电极位置,建立不同供电-接收观测系统,从而达到更 精准的地质识别能力。
[0086]
如图5所示,将温纳装置应用于地质探测,温纳装置的用法是将正极a和 负极b,以及测点电极m、n不断的变换位置,从而向地下不同深度输入电流, 并获得当前mn电位差。每次变换的a、b、m、n位置、电流及电压需要记 录,最终视电阻率按以下方式计算:
[0087][0088]
其中,δu
mn
为m、n测量电极对之间的电位差,i为测量电流,k为装置 系数,具体计算法则为:
[0089][0090]
其中,am、an、mn分别为各电极之间的距离。
[0091]
4、数据预处理
[0092]
去掉灵敏度较大的正演数据,以稳定下一步的反演计算。若处理数据为实 测数据,必须分析实测数据中不正常的飞点,并对实测的电压、电流进行叠加 处理。通过频谱分析及滤波,可去掉流动水以及其它外来电流对观测数据的影 响。
[0093]
此外,通过多次观测,还需要计算当前数据点的方差,方差越大的数据在 反演中权重越小,以此降低质量差的数据在反演中的作用。
[0094]
5、定性分析
[0095]
布极方式为温纳装置,以正极a( )和负极b(-)之间的距离一半为纵 轴,测量电极对m和n之间中心点为测点横向位置,获取视电阻率拟断面图, 视电阻率以上述公式为计算依据。
[0096]
通过分析视电阻率拟断面图,可以初步判断地下地质情况,尤其是潜在的 渗漏点横向位置。
[0097]
6、网格剖分与正演模拟计算
[0098]
正演模拟既是反演计算中重要的组成部分,同时也是实际问题的关键分析 过程。因此步骤6中需要实现网格剖分与正演模拟计算。
[0099]
图6是实施例提供的正演模型图,设置水体均匀电阻率为10ωm,水底以 下不规则异常体电阻率为20ωm,其余部分背景电阻率为100ωm,电极分布与 图3一致。
[0100]
如图7所示,整个正演计算区域采用非结构化三角单元剖分,三角单元具 有较强的适应复杂地形的能力,可提高正反演的计算精度。
[0101]
电位计算方程如下:
[0102]
‑▽
[σ(x,z)
▽
φ(x,y,z)]=i(x,y,z)
[0103]
其中,σ(x,z)为电导率的二维分布,
▽
φ(x,y,z)为电位的三维分布,i(x,y,z)为 一个电流源项;
[0104]
利用有限单元法离散上式,得到一个线性方程组:
[0105]
kv=s
[0106]
其中,k为稀疏矩阵,包含网格单元几何信息以及电阻率结构信息,v为 待求解向量,s为右端项;
[0107]
线性方程组可以用直接解或迭代解求解,直接解精度较高,当待求问题较 小时,直接解更快速。迭代解适用于大规模计算问题,内存消耗小。
[0108]
进一步利用最终的解向量v以及插值矩阵,即可以获得计算空间内任意测 点位置的视电阻率值。
[0109]
图8为图6模型最终的视电阻率拟断面图,从图中可以看到视电阻率的分 布可以在一定程度上反应异常体的存在。
[0110]
7、反演计算
[0111]
采用非结构化三角单元剖分整个计算区域,对水体及陆地结构离散化,并 可以设置不同模型区域的电阻率值,以及电极总个数、电极之间的几何距离、 电极入水深度、电极装置类型、视电阻率总个数、模型尺寸、反演最大迭代次 数。
[0112]
本发明的反演计算首先需要设定目标函数,实施例中的反演目标函数为:
[0113]
[0114]
其中,m为所有电阻率参数组成的列向量,λ为正则化因子,为数据 目标函数,为模型目标函数;
[0115][0116]
其中,δd为观测数据与正演数据的残差向量,观测数据与正演数据都为对 数化后的视电阻率值,wd为数据加权矩阵;
[0117]
wd=diag{1/σ1,1/σ2,...1/σj...1/σm}
[0118]
其中,数据加权矩阵为一个对角矩阵,对角元素为每个数据方差的倒数; 其作用在于控制不同数据在反演中的权重,提高高质量数据的影响,降低低质 量数据的作用。此外,数据加权矩阵还可以起到归一化的作用,对稳定反演有 非常大的帮助。
[0119][0120]
其中,wm为模型协方差矩阵,用于控制模型在横向和纵向的光滑程度, 该矩阵使用梯度算子或拉普拉斯算子对局部模型约束。
[0121]
λ为正则化因子,其作用为控制与之间的关系。λ值越大,则反 演电阻率结构越光滑,分辨率越低;λ越小,反演结果分辨率越高,但反演中 数据项作用强于模型项,可能导致整体反演的多解性增强,反演出现冗余的错 误结构。针对实测数据的反演,λ可选用经验值0.01至10,在反演前可以通过 人为设定来验证反演结果的可靠性。
[0122]
在反演过程中,λ通过以下机制调整:
[0123]
当反演拟合差难以下降时,λ缩小为原来的十分之一;
[0124]
当线性搜索难以找到合适的更新步长时,λ缩小为原来的十分之一。
[0125]
在反演开始前,还需要设定初始模型,越靠近真实模型的初始模型,越能 使反演获得更精确的结果。若反演数据为实测数据,则需要根据测井,地质钻 探等,获取水体以及围岩电阻率值,从而控制已知结构的电阻率分布,达到精 准反演的要求。
[0126]
本发明选用的反演方法具体为高斯牛顿法,高斯牛顿法流程如下::
[0127]
s71:选择初始电阻率模型m0,设定反演最大迭代次数,以及最小拟合差;
[0128]
s72:求解线性方程组获得迭代的更新方向pk;
[0129]
s73:设定一个初始步长,并开始一维线性搜索,寻优当前迭代的模型更新 步长α,并按如下公式更新模型:
[0130]mk 1
=mk αpk[0131]
s74:若当前拟合差小于最小阀值,或迭代次数已经大于最大迭代次数,则 终止反演;若上述条件都未满足,则跳至第二步,开始新的迭代;
[0132]
需要说明的是,步长寻优将当前反演退化为单变量寻优问题。此外,在线 性方程组中,包含如下灵敏度矩阵:
[0133][0134]
其中,灵敏度矩阵的元素为不同观测数据关于模型参数的偏导数,该矩阵 为一个满秩矩阵;当求解问题较大时,该矩阵求解慢。为此,本发明使用互易 定理求解灵敏度矩阵,以加快反演计算。
[0135]
反演流程中,拟合差按如下计算:
[0136][0137]
基于以上反演过程及步骤,在图6模型的正演数据基础上加入2%随机噪 音作为观测数据,验证本发明的反演效果。
[0138]
首先将水体作为自由参数进行反演,且水体与陆地结构都从100ωm开始 反演,反演结果如图9所示,反演网格剖分如图10所示。从图9的结果可以看 到,即使是水下探测,若将水体作为自由参数反演且初始电阻率与陆地一致, 难以将水底下的低阻异常体探明。这是因为,水体相对于地下异常体而言,吸 引人工电流场的作用非常强烈。因此,将水体作为自由参数参与反演,会压制 水下异常,无法完成探查水底地质结构的目的。
[0139]
为了避免上述问题,将水体作为已知结构参与反演,即根据声呐探测结果 获取水体结构分布,但依然将水体作为自由参数,在反演中不固定,最终的反 演结果如图11所示。从图中的结果可以看到,尽管水体已是已知值,但作为自 由参数参与计算,仍然难以识别水底低阻异常体。
[0140]
为进一步提高反演效果,第三个反演计算,将水体作为已知结构并全程作 为固定参数不进行修改。图12为再次反演的结果,从结果可以看到,将水体作 为已知且固定的参数参与反演,对水底下方的低阻识别有了明显改善,反演结 果显示在横向10m至20m位置有较大的异常体,这与图6所示水下异常体位置 基本对应。
[0141]
以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的 精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保 护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。