一种基于全息投影的3d车路协同演示方法
技术领域
1.本发明涉及一种3d车路协同演示方法,更具体的是涉及一种基于全息投影的3d车路协同演示方法。
背景技术:
2.车路协同是采用先进的无线通信和新一代互联网技等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,提高通行效率,从而形成的安全、高效和环保的道路交通系统。
3.目前的车路协同多为平面式,缺乏真实感,仅通过鼠标键盘进行简单的操作可交互性差。
技术实现要素:
4.为解决现有技术的不足,现提供一种基于全息投影的3d车路协同演示方法,包括以下步骤:
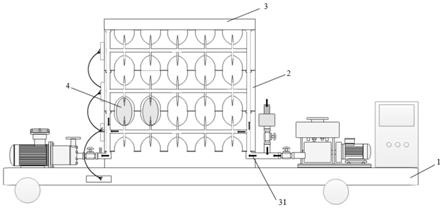
5.s1:放置硬件设备:在特定空间内放置硬件设备包括空间定位发射器、智能穿戴设备、全息投影设备、工作站、通讯网络;
6.s2:搭建定位空间:通过放置的多个空间定位发射器进行定位空间的搭建;
7.s3:获取智能穿戴设备的三维坐标:通过s1放置的定位发射器获取智能穿戴设备的三维坐标;
8.智能穿戴设备是应用穿戴式技术对日常穿戴进行智能化设计、开发出可以穿戴的设备的总称,如手表、手环、眼镜、服饰等。
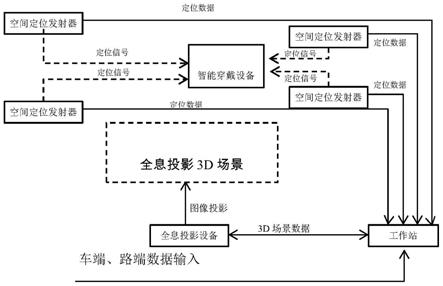
9.s4:获取智能穿戴设备的位置信息:将s1中的工作站与定位发射器、全息投影设备相连获取智能穿戴设备的位置信息;
10.s5:构建3d场景:获取3d场景的构建数据构建3d场景;
11.s6:进行3d全息投影:将s4获取的位置信息通过全息投影设备投影至s5所构建的3d场景中实现场景和用户之间的交互。
12.优选的,所述s5获取3d场景的构建数据包括自动驾驶车端的相机数据、激光雷达数据,或者车路协同路端的相机数据与激光雷达数据。
13.优选的,所述s1中定位发射器的数量为四个,四个定位发射器分散布置在特定空间内。
14.优选的,所述s1中工作站与定位发射器、全息投影设备相连。
15.优选的,所述s1中智能穿戴设备设有触控装置与定位标记。
16.还包括构建车辆整车模型,车辆整车模型包括:车辆运动学模型,车辆动力学模型及车辆侧翻侧滑临界状态模型。
17.车辆整车模型用于与车载警示与控制子系统协同工作,控制子系统包括轨迹偏差
计算模块,滑移率偏差计算模块,侧翻侧滑状态计算模块,分别用于在所述雨雾场景下计算不同工况下车辆行进路线实际偏移量、车辆滑移率以及车辆临界侧翻/侧滑速度,并对上述各模块输出量进行误差级别判断后评定危险等级,同时给出不同工况下车辆临界安全速度值;并将所述危险等级和所述车辆临界安全速度值显示在所述智能人机交互界面上,智能人机交互界面上还用于车辆行驶动画演示。
18.全息投影显示单元是通过tft屏与显示用三棱锥的一个经过镀膜处理的反射面形成45
°
的角度,通过光学反射原理发射到人眼中,让人眼感觉图像是在三棱锥中一个垂直面显示出来的,在全息影像显示单元内形成虚拟投影面,用于显示机器人的状态,通过3d图像、声音、智能控制等输出,与用户实现智能操控、娱乐互动及智能信息交换、共享,提高用户的人机体验及其驾驶安全。
19.有益效果:
20.(1)区别于现有技术,本发明提供的一种基于全息投影的3d车路协同演示方法,通过全息投影的方式立体地展示了车路协同的场景,一方面帮助用户真实地感受自动驾驶的场景,另一方面可以帮助实现自动驾驶事故场景的还原。
21.(2)本发明中获取3d场景的构建数据来源来自自动驾驶车端的相机数据、激光雷达数据,或者来自车路协同路端的灯杆上的相机数据、激光雷达数据。因此根据数据的来源不同,可以搭建出不同的3d场景,用户可以在不同场景中,通过智能穿戴设备进行不同的操作,以达到多样化的与自动驾驶场景交互的目的。
附图说明
22.图1是实施例中基于全息投影的3d车路协同演示方法的流程图;
23.图2是演示方法的主要步骤流程图。
具体实施方式
24.为了加深对本发明的理解,下面将结合实施例和附图对本发明作进一步详述,该实施例仅用于解释本发明,并不构成对本发明保护范围的限定。
25.一种基于全息投影的3d车路协同演示方法,包括产品侧与技术侧。
26.一、产品侧
27.产品包括硬件部分和软件部分,其中硬件部分包括空间定位发射器、智能穿戴设备、全息投影设备和工作站,其中工作站与定位发射器、全息投影设备相连;软件部分是一种用以实现数据的接收和全息投影转换功能的程序。
28.二、技术侧
29.一种基于全息投影的3d车路协同演示方法,流程图如图1所示主要包括以下步骤:
30.(1)在房间中放置空间定位发射器、智能穿戴设备、全息投影设备、工作站、通讯网络,其中空间定位发射器在房间分散地放置四个;
31.(2)通过房间内的四个空间定位发射器搭建定位空间;
32.(3)通过步骤(2)放置的定位发射器获取智能穿戴设备的三维坐标;
33.(4)通过将工作站与定位发射器、全息投影设备相连获取智能穿戴设备的位置信息;
34.智能穿戴设备是应用穿戴式技术对日常穿戴进行智能化设计、开发出可以穿戴的设备的总称,如手表、手环、眼镜、服饰等。
35.广义的智能穿戴设备包括功能全、尺寸大、可不依赖智能手机实现完整或者部分的功能(例如智能手表或智能眼镜等),以及只专注于某一类应用功能,需要和其它设备(如智能手机)配合使用(如各类进行体征监测的智能手环、智能首饰等)。随着技术的进步以及用户需求的变迁,可穿戴式智能设备的形态与应用热点也在不断变化。
36.(5)3d场景的构建数据来源于自动驾驶车端的相机数据、激光雷达数据,或者是车路协同路端灯杆上的相机数据、激光雷达数据,根据数据来源的不同可以构建出不同的3d场景,用户可以在不同的场景中,通过智能穿戴设备进行不同的操作,实现多样化的与自动驾驶场景交互的目的。
37.(6)将步骤(4)获取的位置信息通过全息投影设备投影至步骤(5)所构建的3d场景中实现场景和用户之间的交互。
38.本发明通过全息投影的方式立体地展示了车路协同的场景,一方面帮助用户真实地感受自动驾驶的场景,另一方面可以帮助实现自动驾驶事故场景的还原。
39.利用干涉原理记录并再现物体真实的三维图像。从而可以帮助驾驶人员对道路上可能发生的事故做演示,并促进智能驾驶系统的学习。
40.同时该演示方法可以准确记录测试车辆和目标是否发生碰撞;对于运动目标的逼撞试验测试、通过牵引车辆的牵引运动实现不同行驶速度、加速度的运动模拟;通过改变全息投影素材使得不同目标投影到相邻车道内;测试车辆在目标所在的车道内开展不同行驶速度的逼撞试验,准确记录测试车辆和目标是否发生碰撞。
41.全息投影显示单元是通过tft屏与显示用三棱锥的一个经过镀膜处理的反射面形成45
°
的角度,通过光学反射原理发射到人眼中,让人眼感觉图像是在三棱锥中一个垂直面显示出来的,在全息影像显示单元内形成虚拟投影面,用于显示机器人的状态,通过3d图像、声音、智能控制等输出,与用户实现智能操控、娱乐互动及智能信息交换、共享,提高用户的人机体验及其驾驶安全。
42.作为进一步改进,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。