一种mimo-ofdm水声信道估计方法
技术领域
1.本发明涉及一种mimo-ofdm水声信道估计方法,属于水声通信信道估计技术领域。
背景技术:
2.水声信道传播损耗严重、频谱资源稀缺、频率选择性严重、通信可靠性差,而mimo与ofdm技术相结合,在应对水声信道的多径干扰、频率选择性衰落以及带宽有限等方面提供了新的途径,显著提高通信系统性能。信号从发射端到接收端,经历水声信道会产生严重的畸变与衰减,使得接收方难以获取有效信息,同时uwa(underwater acoustic)浮标站若缺少信道状态信息则难以高效设计后续处理模块以实现自适应通信,提高通信系统性能;且水声信道具有强时变性、高动态性,海面的涌动会带来信道散射体、多径数等信道参数的改变,所以要实现稳健可靠、智能化的mimo-ofdm水声通信,准确、及时的信道估计对mimo-ofdm系统的性能至关重要;其次通常水声信道估计文献仅考虑估计结果对于水下接收机的用处,在水下接收机端进行下行信道估计,然而水下接收机端往往资源受限、供电困难,同时多水声换能器组成的uwa浮标站同样需要下行信道状态信息以实现预编码等后续操作,实现自适应高效通信,故可将计算及其他处理消耗转移到能源相对供应充足的uwa浮标站,而后共享信道估计结果;另外,常见的水声信道估计算法如最小二乘法(ls)、最小均方误差法(mmse)等所得结果为信道矩阵,在mimo-ofdm技术下以高维矩阵存在,uwa浮标站在下行链路发送估计结果时会带来链路高负担问题。
3.随着gpu在大规模并行计算的广泛应用,以及模式识别、计算机视觉、神经网络的飞速发展,深度学习算法逐渐走向前沿,可提取到更高层次的、抽象的特征,对特征的表达更加准确高效,且泛化性好、可端到端训练。因此利用深度学习进行mimo水声信道估计是可行且必要的,然而通常情况下,深度学习网络模型会带来庞大的训练参数量且已有的深度学习算法模型更适配于其对应的数据集,因此需建立特有数据集并改进原有深度学习模型以实现高精度mimo水声信道估计。
4.经对现有文献检索发现,中国专利申请号为cn201911372155.7,名称为“一种基于深度学习的下行信道快速重建方法”,该方法利用频分双工模式下的空间互易性,在上行信道中估计出角度和时延这类与频率无关的参数,将其用作下行信道参数,有效降低了反馈链路负担与开销,同时基于深度学习算法的信道参数提取辅助完成下行信道快速重建,然而其并未充分利用数据集特点优化深度学习模型与策略,信道估计精度有待提高。因此,有必要研究在保证低链路负担前提下的水声通信高精度估计方法。
技术实现要素:
5.本发明需要解决的技术问题是提供一种基于改进yolo网络的mimo-ofdm水声信道估计方法,调整时分双工系统下的信道估计策略,减小水下接收机能耗,并利用上行导频数据集特性,改进原有yolo网络,提高信道估计精度。
6.为解决上述技术问题,本发明所采用的技术方案是:
7.一种mimo-ofdm水声信道估计方法,包括如下步骤:
8.步骤一,利用matlab软件根据mimo-ofdm水声信道模型与信道参数生成上行导频信号,转换域后保存对应稀疏幅值图像与上行链路信道参数,所述上行链路信道参数包括多径数p以及各路径角度时延和上行链路增益
9.步骤二,自动标注图像,并根据标注框大小得到适用于此数据集的先验框,修改原yolov4网络的主干特征提取网络为mobilenet v3网络,用深度可分离卷积块代替普通卷积,提高原yolov4网络结构中三个特征层中浅层的权重,修改原有损失函数中定位损失相对于置信度损失与分类损失的权重并增加高度损失;
10.步骤三,将图像与对应标签送入改进后的yolo模型进行训练,得到优良的图像检测模型与权重;
11.步骤四,在实际的时分双工系统信道估计情形下,水下接收机在上行链路发送导频信号到uwa浮标站;
12.步骤五,uwa浮标站对接收到的信号进行域转换,并生成相应的稀疏图像,利用改进后的yolov4网络提取上行链路信道参数,进而根据信道模型合成信道矩阵,以实现预编码操作,提高mimo-ofdm水声通信系统的整体性能;
13.步骤六,uwa浮标站根据实时海洋流速传感器的监测结果vs调控信道估计频率,将此结果以及提取出的信道参数一并在下行链路发送给水下接收机;
14.步骤七,水下接收机端利用uwa浮标站传来的信道参数重构出下行信道矩阵h
dl
以高效实现信道均衡、译码的后续操作,并根据信道估计频率调整下一次发送上行导频的时间。
15.本发明技术方案的进一步改进在于:步骤一具体方法如下:
16.第一步,产生水声换能器数m、子载波数n、多径数p以及各路径角度时延上行链路增益信噪比snr等参数,在matlab程序里计算得出上行导频信号y
ul
并进行域转换;
17.第二步,生成对应的导频幅值图并保存,同时保存对应设定的信道参数值,作为训练yolo网络的角度-时延域mimo-ofdm水声信道模型上行导频数据集。
18.本发明技术方案的进一步改进在于:步骤二具体方法如下:
19.第一步,根据已知设定的参数值,利用信道参数与导频图像最高幅值点的对应关系,计算出真实框的大小与中心点坐标,利用python编写标签文件结构,生成对应的.xml标注文件,实现全自动目标标注,并在labelimg软件中验证标注框的正确性。相比于利用标注软件手动人工标注更加精确与高效,同时增强了数据集可扩充可修改的灵活性;
20.第二步,处理完的图像数据以.jpg格式保存,图像标注数据以.xml格式存放在标签文件夹下,.xml文件中主要包含图像的宽高与真实框坐标信息,将标注与图像结合,构成包含5040张图片与对应标注文件的角度-时延域上行导频数据集,训练集、验证集和测试集相独立;
21.第三步,根据标注框大小得到适用于此数据集的先验框,大小分别为:[6
×
7,8
×
8,10
×
10,12
×
11,13
×
13,16
×
17,26
×
28,30
×
30,32
×
31],修改原有yolov4网络的主干特征提取网络为mobilenet v3网络,用深度可分离卷积块代替普通卷积,提高原yolov4网
络结构中三个特征层中浅层的权重,修改原有损失函数中定位损失相对于置信度损失与分类损失的权重,并增加高度损失的惩罚项;分类信息改为0;
[0022]
本发明技术方案的进一步改进在于:步骤三具体方法如下:
[0023]
第一步,将训练集图像与对应标签输入改进后的yolo模型进行迭代训练,对网络参数进行更新,最终得到优良的图像检测模型与权重;
[0024]
第二步,离线训练完成,保存权重,待在线测试时进行水声信道估计。
[0025]
本发明技术方案的进一步改进在于:所述步骤四中水下接收机发送全一导频到uwa浮标站,uwa浮标站包括均匀线性排列的大量水声换能器。
[0026]
本发明技术方案的进一步改进在于:步骤五的具体方法如下:
[0027]
第一步,uwa浮标站将接收信号y
ul
从换能器-子载波域转换至角度-时延域:并对y
ul
中每个元素的模进行归一化:η取255,生成对应的角度-时延域稀疏图像;
[0028]
第二步,加载模型,对上行导频稀疏图像进行检测,利用训练后的yolo网络对图像中的亮斑进行预测,设置置信度阈值,得到预测框置信度、坐标信息和分类信息,并保存坐标信息为.txt文件待后续信道参数数据处理;
[0029]
第三步,根据坐标信息与信道参数的对应关系计算出估计所得多径数p以及各路径角度时延上行链路增益上行链路增益其中,y
ul
为收到信号y
ul
堆叠形成的列向量;
[0030]
其中,生成的.txt文件中行数即检测到的亮斑个数,对应水声通信多径数,每一行包含亮斑包围框矩形的左上坐标点与右下坐标点,而亮斑中心点对应信道参数路径时延角度计算亮斑中心点坐标时需要除以输入到yolo网络的图片大小。
[0031]
本发明技术方案的进一步改进在于:步骤六的具体方法如下:
[0032]
第一步,海洋涌动会导致海面、海底散射体变化,造成多径数及角度、时延的变化,原有信道参数不再符合此刻的信道,故根据实时海洋流速传感器的监测结果vs调控信道估计频率,若vs≥1.2v
ave
m/s,则相邻两次信道估计的时间为原来的倍,其中v
ave
为平均海洋流速;
[0033]
第二步,uwa浮标站将信道估计频率以及提取所得多径数p以及各路径角度时延上行链路增益这些上行信道参数在下行链路发送给水下接收机;
[0034]
链路传输的仅仅是与多径数成线性相关的信道参数量,而非与水声换能器数、子载波数有关的高维信道矩阵,故极大减小了链路负担。
[0035]
本发明技术方案的进一步改进在于:步骤七的具体方法如下:
[0036]
第一步,由于处于时分双工系统,上下行链路信道参数可以共享,水下接收机重构
出下行信道矩阵h
dl
以实现信道均衡、译码等后续操作;
[0037]
第二步,根据uwa浮标站发送的信道估计频率调整下一次发送上行导频的时间,抵抗高动态性带来的水声信道估计误差与过时性,实现高精度的mimo-ofdm水声信道估计;
[0038]
具体地,相邻两次信道估计的时间间隔隔
[0039]
由于采用了上述技术方案,本发明取得的技术进步是:
[0040]
1、根据水声上行导频数据集特点,改进原有yolov4网络模型与策略,提高了信道估计精度;
[0041]
2、依据实时监测的海洋流速调控信道估计频率,保证mimo-ofdm水声通信系统信道估计的有效性。
附图说明
[0042]
图1是本发明依托的水声信道上行导频稀疏图像离线训练流程图;
[0043]
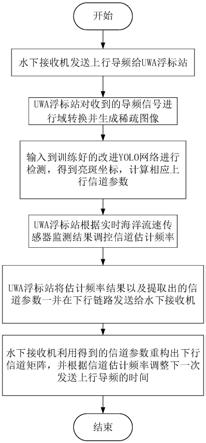
图2是本发明依托的水声信道在线估计流程图;
[0044]
图3a-3c是本发明依托的水声换能器数、子载波数均分别为32,64,128时的水声信道上行导频稀疏图像输入改进yolo网络的测试结果图;
[0045]
图4是本发明与基于yolov3信道估计算法的估计准确度仿真对比图。
具体实施方式
[0046]
下面结合实施例对本发明做进一步详细说明:
[0047]
uwa浮标站与水下接收机工作于时分双工系统,收发双方皆需下行信道信息,uwa浮标站根据信道信息以实现预编码等操作,水下接收机则利用下行信道矩阵实现信道均衡、译码等后续操作,提高mimo-ofdm水声通信系统的整体性能,如图2所示为本发明依托的水声信道在线估计流程图。为节省水下接收机能耗,将上行导频信号在上行链路发送给uwa浮标站,在浮标站端实现上行信道估计,而时分双工系统的上下行信道之间存在信道互易性,可直接用于下行信道,然而mimo-ofdm带来的高维信道矩阵在链路的传输必将带来高链路负担与额外开销,故uwa浮标站在进行上行信道估计时可基于信道模型参数,根据收到的导频信号提取信道参数,而后将低维信道参数在下行链路传给水下接收机,水下接收机得到信道参数后直接重构出下行信道矩阵,完成下行信道估计。
[0048]
具体步骤如下:
[0049]
步骤一,利用matlab软件根据mimo-ofdm水声信道模型与信道参数生成上行导频信号,转换域后保存对应稀疏幅值图像与上行链路信道参数如多径数p以及各路径角度时延上行链路增益等;
[0050]
进一步的,步骤1中,包括如下步骤:
[0051]
第一步,产生水声换能器数m、子载波数n、多径数p以及各路径角度时延上行链路增益信噪比snr等参数,在matlab程序里计算得出上行导频信号y
ul
并进行域
转换;
[0052]
第二步,生成对应的导频幅值图并保存,同时保存对应设定的信道参数值,作为训练yolo网络的角度-时延域mimo-ofdm水声信道模型上行导频数据集。
[0053]
步骤二,自动标注图像,并根据标注框大小得到适用于此数据集的先验框,修改原有yolov4网络的主干特征提取网络为mobilenet v3网络,用深度可分离卷积块代替普通卷积,提高原yolov4网络结构中三个特征层中浅层的权重,修改原有损失函数中定位损失相对于置信度损失与分类损失的权重并增加高度损失;
[0054]
进一步的,步骤2中,包括如下步骤:
[0055]
第一步,根据已知设定的参数值,利用信道参数与导频图像最高幅值点的对应关系,计算出真实框的大小与中心点坐标,利用python编写标签文件结构,生成对应的.xml标注文件,实现全自动目标标注,相比于利用标注软件手动人工标注更加精确与高效,同时增强了数据集可扩充可修改的灵活性;
[0056]
第二步,处理完的图像数据以.jpg格式保存,图像标注数据以.xml格式存放在标签文件夹下,.xml文件中主要包含图像的宽高与真实框坐标信息,将标注与图像结合,构成包含5040张图片与对应标注文件的角度-时延域上行导频数据集,训练集、验证集和测试集相互独立;
[0057]
第三步,根据标注框大小得到适用于此数据集的先验框,大小分别为:[6
×
7,8
×
8,10
×
10,12
×
11,13
×
13,16
×
17,26
×
28,30
×
30,32
×
31],修改原有yolov4网络的主干特征提取网络为mobilenet v3网络,用深度可分离卷积块代替普通卷积,提高原yolov4网络结构中三个特征层中浅层的权重,修改原有损失函数中定位损失相对于置信度损失与分类损失的权重并增加高度损失;分类信息改为0;
[0058]
步骤三,将图像与对应标签送入改进后的yolo模型进行训练,得到优良的图像检测模型与权重;
[0059]
进一步的,步骤3中,包括如下步骤:
[0060]
第一步,将训练集图像与对应标签输入改进后的yolo模型进行迭代训练,对网络参数进行更新,最终得到优良的图像检测模型与权重。
[0061]
第二步,离线训练完成,保存权重,待在线测试时进行水声信道估计。
[0062]
如图1所示,所述一种基于改进yolo网络的mimo-ofdm水声信道估计方法,其水声信道上行导频稀疏图像离线训练包括上述三个步骤。
[0063]
步骤四,在实际的时分双工系统信道估计情形下,水下接收机在上行链路发送导频信号到uwa浮标站;
[0064]
步骤五,uwa浮标站对接收到的信号进行域转换,并生成相应的稀疏图像,利用改进后的yolov4网络提取上行链路信道参数如多径数p以及各路径角度时延上行链路增益等,之后根据信道模型合成信道矩阵以实现预编码等操作,提高mimo-ofdm水声通信系统的整体性能;
[0065]
第一步,uwa浮标站将接收信号y
ul
从换能器-子载波域转换至角度-时延域:
并对y
ul
中每个元素的模进行归一化:η取255,生成对应的角度-时延域稀疏图像;
[0066]
第二步,加载模型,对上行导频稀疏图像进行检测,利用训练后的yolo网络对图像中的亮斑进行预测,设置置信度阈值,得到预测框置信度、坐标信息和分类信息,并保存坐标信息为.txt文件待后续信道参数数据处理;
[0067]
第三步,根据坐标信息与信道参数的对应关系计算出估计所得多径数以及各路径角度时延并求得上行链路增益并求得上行链路增益其中,y
ul
为收到信号y
ul
堆叠形成的列向量。
[0068]
步骤六,uwa浮标站根据实时海洋流速传感器的监测结果vs调控信道估计频率,将此结果以及提取出的信道参数一并在下行链路发送给水下接收机。
[0069]
第一步,海洋涌动会导致海面、海底散射体变化,造成多径数及角度、时延的变化,原有信道参数不再符合此刻的信道,故根据实时海洋流速传感器的监测结果νs调控信道估计频率,若vs≥1.2v
ave
m/s,则相邻两次信道估计的时间为原来的倍,其中v
ave
为平均海洋流速。
[0070]
第二步,uwa浮标站将信道估计频率以及提取所得多径数p以及各路径角度时延上行链路增益这些上行信道参数在下行链路发送给水下接收机。
[0071]
步骤七,水下接收机端利用uwa浮标站传来的信道参数重构出下行信道矩阵h
dl
以高效实现信道均衡、译码等后续操作,并根据信道估计频率调整下一次发送上行导频的时间。
[0072]
第一步,由于处于时分双工系统,上下行链路信道参数可以共享,水下接收机重构出下行信道矩阵h
dl
以实现信道均衡、译码等后续操作;
[0073]
第二步,根据uwa浮标站发送的信道估计频率调整下一次发送上行导频的时间,抵抗高动态性带来的水声信道估计误差与过时性,实现高精度的mimo-ofdm水声信道估计。
[0074]
如图2所示,所述一种基于改进yolo网络的mimo-ofdm水声信道估计方法,在线估计流程图包括上述步骤。
[0075]
本实施例中导频信号数据集生成过程中,信道参数时延、角度、增益等在一定范围内随机生成,按照信道模型生成信道矩阵,水声换能器数、子载波数相等且为32、64或128,路径数均匀分布于[1,6],snr均匀分布于[0,12]。数据集共5040张,按8:2的比例划分为训练、验证集与测试集,其中训练集与验证集比例也为8:2。
[0076]
本实施例中,根据水声上行导频数据集特点,改进原有yolov4网络模型与策略,在信道估计速度相当的前提下有效提高了估计精度;本发明将先验框合理化设置以加快收敛速度,提高准确率,大小分别为:[6
×
7,8
×
8,10
×
10,12
×
11,13
×
13,16
×
17,26
×
28,30
×
30,32
×
31];修改原有yolov4网络的主干特征提取网络为mobilenet v3网络,用深度可分离卷积块代替普通卷积,大大减少参数量,同时mobilenet v3中的注意力机制可加强特征提取,增强检出率与准确度;提高原yolov4网络结构中三个特征层中浅层的权重;训练网络时,损失函数分为三部分:置信度误差l
conf
,定位误差l
loc
和分类误差l
cls
,由于信道估计目标为得到准确的信道参数值,而这些参数值与图像中目标位置参数有关,故修改原有损失函数中定位损失相对于置信度损失与分类损失的权重,为了得到更精确的预测框,增加高度损失的惩罚项。
[0077]
如图3a-3c所示是本发明一种基于改进yolo网络的mimo-ofdm水声信道估计方法依托的水声换能器数、子载波数均分别为32,64,128时的水声信道上行导频稀疏图像输入改进yolo网络的测试结果图,所有目标物体都被以高置信度准确检测到,即使在水声换能器数、子载波数为128时的极小目标时仍可以达到准确识别;利用改进的yolo网络,大大提高了信道估计准确度,如图4所示是本发明方法与基于yolov3信道估计算法在水声换能器数、子载波数为128时的估计准确度仿真对比图,信道矩阵的估计误差以nmse表示,即在1008张测试集上以fps=39.65实现高准确度信道估计,而在基于yolov3的信道估计中,fps为30.31,且信道估计精度较低。
[0078]
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。