1.本发明属于无线通信技术领域,涉及车对车通信领域,具体涉及一种半圆柱隧道中多散射簇的宽带非平稳车对车信道建模方法。
背景技术:
2.近年来,智能交通系统(intelligent traffic systems,its)作为一种改善环境,降低运输成本和缓解交通堵塞的解决方案,引起了人们的广泛关注。而车与车之间的通信也是智能交通系统中尤为重要的一环。为了进一步研究车对车(vehicle-to-vehicle,v2v)通信系统,需要更准确地描述无线传输信道,因此采用合理方法对v2v传播信道进行准确地刻画尤为重要。目前已有一些关于v2v信道建模的研究工作。从信道建模方法上可将v2v信道模型分为确定性建模和随机性建模。
3.yang m等人在5.9ghz频段下进行了关于大障碍物情况下的实际v2v信道测量,证明了大型车辆的障碍物会带来额外信道衰减,并且会显著影响多径分量的角分布。最后根据测量参数提出了一个车辆障碍物场景下基于簇的v2v信道模型。oestges c等人分别在测量了微小区环境下,移动车辆在停车场和建筑之间两个场景下的v2v通信,并根据测量所得数据提出了基于标准信道模型cost 2100 的参数化模型。这些v2v模型都是属于确定性建模方法,虽然确定性模型可以较好地反映出信道的非平稳特性,但是由于模型本身较为复杂,且不同场景的变化都会给测量结果带来较大的变化,这同样限制了其在实际通信系统中的应用。 hao j等人中提出一种用于密集城市街道环境的v2v二维信道模型,将椭圆散射区域中的多跳传播路径分为奇数和偶数弹跳传播两种情况来考虑,但是未能考虑更贴近实际场景的三维传播模型。蒋育康和郭爱煌针对高铁隧道场景提出了以一种基于3d圆柱的几何随机模型,对收发端天线间隔和时空相关统计特性进行了研究,虽然高铁通信场景不同于v2v通信的双端移动,但对于隧道场景通信系统设计有着参考价值。jiang h等研究了椭圆隧道场景下车辆任意速度和方向对信道统计特性的影响,并且首次在v2v模型中引入了三维半椭球模型来描述隧道曲壁,以同一尺寸的半椭球模拟具有相同时延的散射体,不同半径的半椭球模拟不同的传播时延。但规则形状的几何随机信道建模的散射体分布过于理想,不能完全贴近真实的通信环境。
4.综上所述现有v2v信道建模在隧道这类特殊场景下的相关研究还存在一些不足。因此,本发明将隧道空间抽象为半圆柱体几何体,提出一种适用于隧道场景下的三维非平稳v2v信道模型。
技术实现要素:
5.本发明的目的在于提供一种针对半圆柱隧道场景下基于多簇的三维宽带非平稳v2v信道建模方法,丰富了v2v信道建模方法,对于特殊场景下的v2v 信道建模研究有着重要参考意义。
6.为达到上述目的,本发明提供如下技术方案:
7.一种针对半圆柱隧道场景,基于多簇的三维宽带非平稳v2v信道建模方法,具体包括以下步骤:
8.s1:建立隧道场景下基于多簇的三维宽带非平稳车对车信道模型,设置隧道传播条件,生成天线参数及k因子,生成簇集的初始角度均值和通信车辆的坐标位置;
9.s2:根据初始角度均值生成簇内散射体的方位角和俯仰角,结合隧道场景的几何关系推导视距成分,单弹跳成分和多弹跳成分的复信道冲激响应的函数表达式;
10.s3:根据发射机、接收机和簇的位置,考虑发射机接收机的移动性,计算波达信号从发射机发出达到接收机的时变路径和角度;
11.s4:引入簇的可视域扩展,利用收发端移动过程中不断进出簇的可视域范围,改变簇在通信过程中的可见状态;
12.s5:利用传递函数和簇的活跃状态推导不同成分下的空时相关函数,以分析不同成分的空时非平稳特性;
13.s6:由隧道场景下基于多簇的三维宽带非平稳车对车信道模型的参数以及统计特性仿真验证构建的基于多簇的三维宽带非平稳车对车信道模型。
14.进一步,上述步骤s1建立的基于多簇的三维宽带非平稳车对车信道模型,模型中包含一个长度为l,截面半径为r的半圆柱隧道,发送端mt和接收端 mr处于匀速运动状态。共有i
cluster
个簇随机分布于隧道内壁上,簇定义为拥有类似时延和角度的散射体的集合。接收端收到的信号由三个部分构成,los成分的信号从发送端直接到达接收端。sb成分的信号经达到接收端前只经过一个散射体反射。mb成分的信号经过多个簇的反射,最终到达接收端。
15.进一步,参照图1-3,上述s1中假设第i个簇内存在ni个有效散射体,第 ni(ni=1,2,...,ni)个散射体定义为其位置可在坐标系表示为(xi,yi,zi)。进一步的,因为簇随机分布于隧道内壁上,根据几何关系,簇的位置可表示为其中xi和yi都是随机变量。
16.进一步,上述s2中,所述基于多簇的三维宽带非平稳车对车信道模型函数的矩阵表达式为:
[0017][0018]
其中,h
pq
(t,τ)表示为mt第p(p=1,2,...,m
t
)根发射天线和第 q(q=1,2,...,mr)根接收天线之间的复冲激响应,它包含了视距分量和非视距分量两个部分。其中τ
los
表示传播信号从发送端直接到达接收端的传播时延,τ
nlos
是信号从mt侧发射天线发出,经散射体反射后到达mr侧接收天线的平均传播时延。而非视距分量由l个单簇和m对双簇两部分叠加组成的,进一步表达为:
[0019][0020]
上述的los成分,sb成分和mb成分复信道冲激响应的函数表示为:
[0021][0022][0023][0024]
其中,k
pq
表示莱斯因子,c表示载波传播速度,λ表示波长,fc表示载波频率。收发端车辆分别以v
t
和vr的速度在固定的方向上移动。γ
t
和γr分别代表的mt和mr的移动方向。和分别是los分量时变的平均水平离开角(aaod)和时变发射仰角(eaod);和分别是los分量的时变平均水平到达角(aaoa)和时变到达仰角(eaoa)。为los分量的初始相位,且p
l
表示sb分量对总散射功率的贡献。和分别表示 sb分量的时变平均水平到达角(aaoa)和时变到达仰角(eaoa);和分别是sb分量的时变平均水平离开角(aaod)和时变发射仰角(eaod)。表示 sb分量的初始相位,同样有pm表示mb分量对总散射功率的贡献。和分别表示mb分量的时变平均水平到达角(aaoa)和时变到达仰角(eaoa);和分别是mb分量的时变平均水平离开角 (aaod)和时变发射仰角(eaod)。表示mb分量的初始相位,并假设
[0025]
进一步,上述s3中,sb成分的冲激响应表达式中表示信号从mt侧天线经过第l个簇中的第n
l
个散射体后到达mr侧天线处的传输距离,进一步可以表示为
[0026][0027]
其中:
[0028][0029][0030]
表示发送端第p个天线到散射簇中第n
l
个散射体的距离,表示接收端第q个子天线到散射体n
l
的距离。基于模型中车辆的相对运动和几何关系,可根据图中场景推导出sb成分时变和的闭式表达式:
[0031][0032][0033]
进一步,s3中mb成分的冲激响应表达式中表示信号从mt侧第 p个子天线出发,先后经过散射簇n
m,1
和n
m,2
,到达mr侧第q个子天线所经过的传输距离,表示为如下形式:
[0034][0035]
其中:
[0036][0037][0038]
表示信号从发射端第p个子天线到散射簇中第n
m,1
个散射体之间的传播距离;表示信号从接收端第q个子天线到散射簇第n
m,2
个散射体之间的传播距离;一对簇中的虚拟链路平均时延可通过指数分布随机产生。根据模型中几何关系,可以得到发送侧时变的和
[0039]
[0040][0041]
进一步,s3中每个簇的功率参考winner ii模型,其表达式为:
[0042][0043]
其中,τi表示簇的时延,服从指数分布,στ即时延的方差,zi~n(0,ξ)是每个簇的阴影衰落分量。
[0044]
进一步,上述s4中,假定在隧道环境中簇的可视区域vr投射到x-y平面为固定尺寸的圆形区域,隧道中可视区域的集合表达式如下:
[0045]
ω={ωi,i=1,2,...,i
cluster
}
[0046][0047]
其中,(xi,yi)表示第i个簇的中心位置在x-y平面上的竖直投影,r
vr
表示簇的可视区域的半径。每个簇都有自己固定的可视区域,不同簇的可视区域可以相互重叠互不干扰。随着车辆运动进入任一vr,相关的簇会平滑的增加其对车辆的可见性。对于sb分量和mb分量,引入簇对信道的增益影响因子σ表达式如下:
[0048][0049][0050]
其中,x
t/r
和y
t/r
为时变的收发端坐标。
[0051]
进一步,上述s5中,所述的不同成分的空时相关函数为:
[0052][0053]
其中,*表示共轭运算,h
pq
(t)表示为mt第p(p=1,2,...,m
t
)根发射天线和第q(q=1,2,...,mr)根接收天线之间的复冲激响应,h
p
′q′
(t-δt)表示为mt第 p
′
(p
′
=1,2,...,m
t
)根发射天线和第q
′
(q
′
=1,2,...,mr)根接收天线之间的复冲激响应。
[0054]
进一步,上述s6所述,将s1-s5推导所得的函数表达式带入matlab中,进行数值仿真与计算,结果参照图4-6。
[0055]
本发明的有益效果在于:
[0056]
本发明建立的基于多簇的三维宽带非平稳车对车信道模型,采用了半圆柱隧道来描述车对车信道中散射簇的分布,利用几何特性分别针对视距场景和非视距场景的信道特性进行了分析。与现有技术相比,本发明建立的隧道场景下车对车信道模型中,将非视距场景分为了sb和mb两种情况进行考虑。同时,引入了可视区域来描述信道的非平稳性。此外,本发明推到了不同成分的时空相关函数。结合上述观点,本发明弥补了过去研究的不足,为分析特殊场景下的三维宽带非平稳车对车信道建模研究有着重要参考意义。
[0057]
本发明的其他优点、目标和特征在某种程度上将在随后的说明书中进行阐述,并且在某种程度上,基于对下文的考察研究对本领域技术人员而言将是显而易见的,或者可以从本发明的实践中得到教导。本发明的目标和其他优点可以通过下面的说明书来实现和
获得。
附图说明
[0058]
为了使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作优选的详细描述,其中:
[0059]
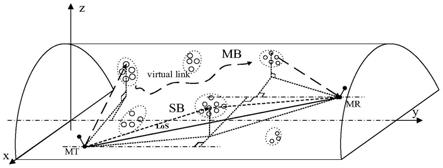
图1为隧道v2v通信场景三维多簇信道模型;
[0060]
图2为半圆柱隧道场景下v2v信道模型中sb成分的几何关系;
[0061]
图3为半圆柱隧道场景下v2v信道模型中mb成分的几何关系;
[0062]
图4为不同k值对应的空间ccf理论和仿真结果;
[0063]
图5为不同时刻下对应的时间acf理论和仿真结果;
[0064]
图6为不同时刻下包含los分量和不包含los的时间acf理论值。
具体实施方式
[0065]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需要说明的是,以下实施例中所提供的图示仅以示意方式说明本发明的基本构想,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
[0066]
其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制;为了更好地说明本发明的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
[0067]
请参阅图1~图6,本发明设计了一种针对半圆柱隧道场景下基于多簇的三维宽带非平稳v2v信道建模方法,具体包括以下步骤:
[0068]
s1:建立隧道场景下基于多簇的三维宽带非平稳车对车信道模型,设置隧道传播条件,生成天线参数及k因子,生成簇集的初始角度均值和通信车辆的坐标位置。
[0069]
步骤s1建立的基于多簇的三维宽带非平稳车对车信道模型,模型中包含一个长度为l,截面半径为r的半圆柱隧道,发送端mt和接收端mr处于匀速运动状态。共有i
cluster
个簇随机分布于隧道内壁上,簇定义为拥有类似时延和角度的散射体的集合。接收端收到的信号由三个部分构成,los成分的信号从发送端直接到达接收端。sb成分的信号经达到接收端前只经过一个散射体反射。mb 成分的信号经过多个簇的反射,最终到达接收端。
[0070]
进一步,参照图1-3,上述s1中假设第i个簇内存在ni个有效散射体,第 ni(ni=1,2,...,ni)个散射体定义为其位置可在坐标系表示为(xi,yi,zi)。进一步的,因为簇随机分布于隧道内壁上,根据几何关系,簇的位置可表示为其中xi和yi都是随机变量。
[0071]
s2:根据初始角度均值生成簇内散射体的方位角和俯仰角,结合隧道场景的几何关系推导视距成分,单弹跳成分和多弹跳成分的复信道冲激响应的函数表达式。
[0072]
步骤s2中,所述基于多簇的三维宽带非平稳车对车信道模型函数的矩阵表达式为:
[0073][0074]
其中,h
pq
(t,τ)表示为mt第p(p=1,2,...,m
t
)根发射天线和第 q(q=1,2,...,mr)根接收天线之间的复冲激响应,它包含了视距分量和非视距分量两个部分。其中τ
los
表示传播信号从发送端直接到达接收端的传播时延,τ
nlos
是信号从mt侧发射天线发出,经散射体反射后到达mr侧接收天线的平均传播时延。而非视距分量由l个单簇和m对双簇两部分叠加组成的,进一步表达为:
[0075][0076]
上述的los成分,sb成分和mb成分复信道冲激响应的函数表示为:
[0077][0078][0079][0080]
其中,k
pq
表示莱斯因子,c表示载波传播速度,λ表示波长,fc表示载波频率。收发端车辆分别以v
t
和vr的速度在固定的方向上移动。γ
t
和γr分别代表的mt和mr的移动方向。和分别是los分量时变的平均水平离开角(aaod)和时变发射仰角(eaod);和分别是los分量的时变平均水平到达角(aaoa)和时变到达仰角(eaoa)。为los分量的初始相位,且p
l
表示sb分量对总散射功率的贡献。和分别表示 sb分量的时变平均水平到达角(aaoa)和时变到达仰角(eaoa);和分别是sb分量的时变平均水平离开角(aaod)和时变发射仰角(eaod)。表示 sb分量的初始相位,同样有pm表示mb分量对总散射功率的贡献。和
分别表示mb分量的时变平均水平到达角(aaoa)和时变到达仰角(eaoa);和分别是mb分量的时变平均水平离开角 (aaod)和时变发射仰角(eaod)。表示mb分量的初始相位,并假设
[0081]
s3:根据发射机、接收机和簇的位置,考虑发射机接收机的移动性,计算波达信号从发射机发出达到接收机的时变路径和角度。
[0082]
步骤s3中,sb成分的冲激响应表达式中表示信号从mt侧天线经过第l个簇中的第n
l
个散射体后到达mr侧天线处的传输距离,进一步可以表示为
[0083][0084]
其中:
[0085][0086][0087]
表示发送端第p个天线到散射簇中第n
l
个散射体的距离,表示接收端第q个子天线到散射体n
l
的距离。基于模型中车辆的相对运动和几何关系,可根据图中场景推导出sb成分时变和的闭式表达式:
[0088][0089][0090]
进一步,步骤s3中mb成分的冲激响应表达式中表示信号从mt 侧第p个子天线出发,先后经过散射簇n
m,1
和n
m,2
,到达mr侧第q个子天线所经过的传输距离,表示为如下形式:
[0091][0092]
其中:
[0093]
[0094][0095]
表示信号从发射端第p个子天线到散射簇中第n
m,1
个散射体之间的传播距离;表示信号从接收端第q个子天线到散射簇第n
m,2
个散射体之间的传播距离;一对簇中的虚拟链路平均时延可通过指数分布随机产生。根据模型中几何关系,可以得到发送侧时变的和
[0096][0097][0098]
进一步,步骤s3中每个簇的功率参考winner ii模型,其表达式为:
[0099][0100]
其中,τi表示簇的时延,服从指数分布,σ
τ
即时延的方差,zi~n(0,ξ)是每个簇的阴影衰落分量。
[0101]
s4:引入簇的可视域扩展,利用收发端移动过程中不断进出簇的可视域范围,改变簇在通信过程中的可见状态。
[0102]
步骤s4中,假定在隧道环境中簇的可视区域vr投射到x-y平面为固定尺寸的圆形区域,隧道中可视区域的集合表达式如下:
[0103]
ω={ωi,i=1,2,...,i
cluster
}
[0104][0105]
其中,(xi,yi)表示第i个簇的中心位置在x-y平面上的竖直投影,r
vr
表示簇的可视区域的半径。每个簇都有自己固定的可视区域,不同簇的可视区域可以相互重叠互不干扰。随着车辆运动进入任一vr,相关的簇会平滑的增加其对车辆的可见性。对于sb分量和mb分量,引入簇对信道的增益影响因子σ表达式如下:
[0106][0107][0108]
其中,x
t/r
和y
t/r
为时变的收发端坐标。
[0109]
s5:利用传递函数和簇的活跃状态推导不同成分下的空时相关函数,以分析不同成分的空时非平稳特性。
[0110]
步骤s5中,所述的不同成分的空时相关函数为:
[0111][0112]
其中,*表示共轭运算,h
pq
(t)表示为mt第p(p=1,2,...,m
t
)根发射天线和第q(q=1,2,...,mr)根接收天线之间的复冲激响应,h
p
′q′
(t-δt)表示为mt第 p
′
(p
′
=1,2,...,m
t
)根发射天线和第q
′
(q
′
=1,2,...,mr)根接收天线之间的复冲激响应。
[0113]
s6:由隧道场景下基于多簇的三维宽带非平稳车对车信道模型的参数以及统计特性仿真验证构建的基于多簇的三维宽带非平稳车对车信道模型。
[0114]
s6所述,将s1-s5推导所得的函数表达式带入matlab中,进行数值仿真与计算,结果参照图4-6。
[0115]
应用实施例:本发明用于针对半圆柱隧道场景下基于多簇的三维宽带非平稳 v2v信道建模以及参数计算,为了验证所提模型的有效性,本发明利用von mesis 分布对散射体的方位角及俯仰角进行描述,对针对半圆柱隧道场景下基于多簇的三维宽带非平稳车对车信道进行研究,分析信道的时变统计特性。参数设置如下: r=6m,l=60m,m
t
=mr=2,fc=5.9ghz,k
pq
=1,v
t
=vr=10m/s,γ
t
=0,γr=π,ψ
t
=ψr=θ
t
=θr=0,n
l
=nm=40。发射端的初始坐标为 (x
t
,y
t
,z
t
)=(4m,3m,1m),接收端的初始坐标为(xr,yr,zr)=(56m,-3m,1m)。设定隧道内壁中随机分布着8个簇,这些簇的位置可以根据收发端的初始位置和方位角初值计算得到。
[0116]
综上所述,本发明扩展了隧道场景下车对车信道建模方法,所建立的基于多簇的三维宽带非平稳车对车信道模型能够描述信道的统计特性,得到的统计特性对于特殊场景下的v2v信道建模研究有着重要参考意义和实际应用价值。
[0117]
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。