1.本发明关于一种抹灰整平方法及套组,尤其是一种可将天花板或墙面整平的抹灰整平方法及套组。
背景技术:
2.作为建筑物隔间的材料种类繁多,依照强度、隔音或现场作业环境等需求或条件的考虑,设计师或业主会选用不同的施工方案,例如砖墙、rc混凝土墙或轻隔间墙等。一般而言,在成型砖墙或rc混凝土墙的过程中,需要经过粗批及细批等抹灰程序,方可使墙面平整以便进行后续上漆或贴砖等程序;其中,所谓“粗批”先将黏稠度高的水泥敷抹或喷涂于基底墙上达预定厚度,再将水泥层的表面整平。
3.目前,执行“粗批”的方法,都是在敷抹或喷涂形成该水泥层后,使用很长的整平尺在该水泥层表面来回推移,以刮除该水泥层上较凸起处的水泥,最后使该水泥层可以形成平整状。然而,在前述的操作过程中,推移该整平尺的施力方向、均匀度及力道等种种因素,都会影响到最后的整平效果,故通常都会需要由一名经验丰富的资深师傅来操作;而资深师傅的工资昂贵,若由资深师傅亲自包办整平前的各项作业,将因体力与时间有限而降低工作效率,进而延宕工期并累绩衍生高额的人力成本,故目前工地现场都会再另请一至两名资历尚浅的师傅来操作整平前的各项作业。
4.换言之,目前的“粗批”需要多人作业,且整平的方法虽然理论上很简单,使用的工具也很简易,但操作起来却很需要经验的累积,否则整平的效果将无法达到预期,或是需要反复修补而耗费冗长的作业时间。再且,就算是由资深师傅来操作,仍必要耗费大量的体力与时间,使得整平作业的效率难以提升,相对工资等人力成本也难以下降。
5.此外,不只是在基底墙上敷抹或喷涂水泥后需要将抹灰整平,在上油漆前的抹灰也面临与前述相似的问题。
6.有鉴于此,目前执行抹灰整平的方法确实仍有加以改善的必要。
技术实现要素:
7.为解决上述问题,本发明的目的是提供一种抹灰整平方法,可以自动化且快速地完成大面积的整平作业,进而可以提升施工效率及质量。
8.本发明的次一目的是提供一种抹灰整平方法,易于操作而不过度依赖工作经验以降低人力成本。
9.本发明的又一目的是提供一种抹灰整平套组,可以提升使用便利性。
10.本发明的再一目的是提供一种抹灰整平套组,可以提升组装便利性。
11.本发明全文所述方向性或其近似用语,例如“前”、“后”、“左”、“右”、“上(顶)”、“下(底)”、“内”、“外”、“侧面”等,主要参考附图的方向,各方向性或其近似用语仅用以辅助说明及理解本发明的各实施例,非用以限制本发明。
12.本发明全文所记载的组件及构件使用“一”或“一个”的量词,仅是为了方便使用且
提供本发明范围的通常意义;于本发明中应被解读为包括一个或至少一个,且单一的概念也包括复数的情况,除非其明显意指其他意思。
13.本发明全文所述“结合”、“组合”或“组装”等近似用语,主要包括连接后仍可不破坏构件地分离,或是连接后使构件不可分离等型态,本领域技术人员可以依据欲相连的构件材质或组装需求予以选择。
14.本发明的抹灰整平方法,包括下列步骤:在墙面上设置一个第一定位点、一个第二定位点、一个第三定位点及一个第四定位点,在一个第一参考方向上,该第一定位点及该第二定位点相对,该第三定位点及该第四定位点相对;一个第一升降导引件固定于该第一定位点与该第二定位点之间,及一个第二升降导引件固定于该第三定位点与该第四定位点之间;一个第一位移模块可位移地连接于该第一升降导引件,及一个第二位移模块可位移地连接于该第二升降导引件;一个第一刮线的一个端固定于该第一定位点,并依序绕经该第一位移模块及该第二位移模块,及该第一刮线的另一个端固定于该第四定位点;一个第二刮线的一个端固定于该第三定位点,并依序绕经该第二位移模块及该第一位移模块,及该第二刮线的另一个端固定于该第二定位点;及驱动该第一位移模块及该第二位移模块同步位移,以由该第一刮线及该第二刮线跨在该第一位移模块与该第二位移模块之间的部位刮除已抹灰墙面上的不平整处,以达整平墙面的效果。
15.本发明的抹灰整平套组,包括:两个端边定位组件,各具有在一个第一参考方向上相对的一个第一定位模块及一个第二定位模块,该两个端边定位组件的第一定位模块在一个第二参考方向上相间隔,该两个端边定位组件的第二定位模块在该第二参考方向上相间隔;两个升降导引件,分别固定于该两个端边定位组件的第一定位模块与第二定位模块之间;两个位移模块,分别可位移地连接于该两个升降导引件;及两个刮线,分别绕经该两个位移模块,其中一个刮线由第一端固定于第一侧的该端边定位组件的第一定位模块,由第二端固定于第二侧的该端边定位组件的第二定位模块,另一个刮线由第一端固定于第二侧的该端边定位组件的第一定位模块,由第二端固定于第一侧的该端边定位组件的第二定位模块。
16.因此,本发明的抹灰整平方法及套组,利用该两个位移模块可以相对该二个升降导引件位移,并由该第一刮线与该第二刮线跨在该第一位移模块与该第二位移模块之间的部位刮除该抹灰区的不平整处;借此,可以自动化且快速地完成大面积的整平作业,可以节省作业时间,且不过度依赖工作经验以降低人力成本,同时可以避免作业人员因技术不佳或体力不支而产生的问题,具有提升施工效率及质量的功效。
17.其中,该第一定位模块及该第二定位模块可以分别具有一个穿线器结合一个定位柱,该刮线可以贯穿该第一定位模块及该第二定位模块的穿线器,该第一定位模块具有一个张紧件结合于该穿线器,该张紧件可以张紧该刮线。如此,可以避免该刮线松脱或垂坠,具有提升刮平效果的功效。
18.其中,该升降导引件可以为线材,该升降导引件贯穿该第一定位模块及该第二定位模块的穿线器,该第一定位模块可以具有另一个张紧件结合于该穿线器,该张紧件可以张紧该升降导引件。如此,可以避免该升降导引件松脱或垂坠,具有提升该两个位移模块的位移顺畅性的功效。
19.其中,该第一定位模块及该第二定位模块可以分别具有一个弹片,该弹片结合该
穿线器,一个螺丝贯穿该穿线器与该弹片并螺接结合该定位柱,该弹片的多个尖部可以抵接一个墙面以推抵该穿线器接触该螺丝的头部。如此,可以选择使该穿线器较靠近该墙面或较远离该墙面,进而可以调整该刮线与该墙面之间的距离,具有提升使用便利性的功效。
20.其中,该位移模块可以具有一个本体,该本体具有相连通的一个第一结合槽及一个第二结合槽,该第一结合槽及该第二结合槽的开口方向可以不位于同一个平面上,该升降导引件结合该第一结合槽及该第二结合槽。如此,可以避免该升降导引件脱离该本体,使该本体可以顺畅地相对该升降导引件在该第一定位模块及该第二定位模块之间位移,具有提升位移顺畅性的功效。
21.其中,该位移模块可以具有一个第一齿轮及一个第二齿轮,该第一齿轮及该第二齿轮设于该位移模块的一个本体,其中一个刮线可以绕经位于第一侧的端边定位组件的第一齿轮及位于第二侧的端边定位组件的第二齿轮,另一个刮线可以绕经位于第二侧的端边定位组件的第一齿轮及位于第一侧的端边定位组件的第二齿轮。如此,该结构简易而便于组装,具有提升组装便利性的功效。
22.其中,该第一齿轮及该第二齿轮可以分别具有一个环槽,该两个刮线可以限位于该两个环槽中。如此,该结构简易而便于制造,具有降低制造成本的功效。
23.其中,该位移模块可以具有一个动力件,该动力件的一个旋转齿轮可以啮合该第一齿轮及该第二齿轮。如此,该旋转齿轮可以带动该第一齿轮及该第二齿轮旋转,具有提升作动顺畅性的功效。
24.其中,该两个刮线位于该第一定位模块与该位移模块之间的线段及位于该第二定位模块与该位移模块之间的线段均可以平行于一个第一参考方向。如此,该第一位移模块及该第二位移模块同步向上或向下位移时,该两个刮线可易于刮除不平整处,具有提升刮平效果的功效。
附图说明
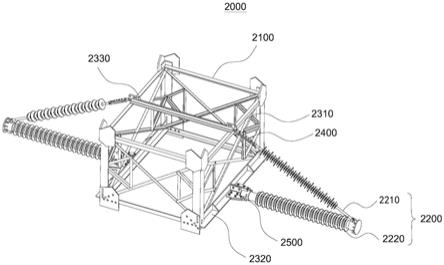
25.图1:本发明一较佳实施例的流程图;图2:本发明一较佳实施例的组合立体图;图3:本发明一较佳实施例位移模块的组合立体图;图4:本发明一较佳实施例的组合正视图;图5:如图4所示的动作情形图。
26.附图标记说明【本发明】1:端边定位组件1a:第一定位模块1b:第二定位模块11:定位柱12:穿线器13:张紧件14:弹片141:尖部
2:升降导引件2a:第一升降导引件2b:第二升降导引件3:位移模块3a:第一位移模块3b:第二位移模块31:本体311:第一结合槽312:第二结合槽32:第一齿轮321:环槽33:第二齿轮331:环槽34:动力件341:旋转齿轮4:刮线4a:第一刮线4b:第二刮线41:第一端42:第二端a1:第一侧a2:第二侧f:螺丝p1:第一定位点p2:第二定位点p3:第三定位点p4:第四定位点t:墙面t1:抹灰区y1:第一参考方向y2:第二参考方向。
具体实施方式
27.为让本发明的上述及其他目的、特征及优点能更明显易懂,下文列举本发明的较佳实施例,并配合附图,作详细说明如下:请参照图1、图2所示,其是本发明抹灰整平方法的一较佳实施例,该抹灰整平方法可以使用于墙壁或天花板,本发明不加以限制,在本实施例中,该抹灰整平方法以使用于一个墙面t来做说明。本发明的抹灰整平方法,包括下列步骤:在该墙面t上设置一个第一定位点p1、一个第二定位点p2、一个第三定位点p3及一个第四定位点p4,在一个第一参考方向y1
上,该第一定位点p1及该第二定位点p2相对,该第三定位点p3及该第四定位点p4上下相对,且在一个第二参考方向y2上,该第一定位点p1及该第三定位点p3可以相对,该第二定位点p2及该第四定位点p4可以相对。
28.接着,将一个第一升降导引件2a固定于该第一定位点p1与该第二定位点p2之间,以及将一个第二升降导引件2b固定于该第三定位点p3与该第四定位点p4之间;其中,该第一升降导引件2a与该第二升降导引件2b可以为轨道或线材,该第一升降导引件2a可以平行于该第二升降导引件2b。
29.接着,将一个第一位移模块3a连接于该第一升降导引件2a,使该第一位移模块3a可以沿该第一升降导引件2a位移,使该第一位移模块3a可以于该第一定位点p1与该第二定位点p2之间位移,以及将一个第二位移模块3b连接于该第二升降导引件2b,使该第二位移模块3b可以沿该第二升降导引件2b位移,使该第二位移模块3b可以于该第三定位点p3及该第四定位点p4之间位移。
30.接着,将一个第一刮线4a的第一端41固定于该第一定位点p1,并依序绕经该第一位移模块3a及该第二位移模块3b后,再将该第一刮线4a的第二端42固定于该第四定位点p4,使该第一刮线4a跨在该第一位移模块3a与该第二位移模块3b之间的部位可以接触该墙面t;以及将一个第二刮线4b的第一端41固定于该第三定位点p3,并依序绕经该第二位移模块3b及该第一位移模块3a后,再将该第二刮线4b的第二端42固定于该第二定位点p2,使该第二刮线4b跨在该第一位移模块3a与该第二位移模块3b之间的部位可以接触该墙面t。
31.最后,施工人员可以在该墙面t抹灰以形成一个抹灰区t1,并驱动该第一位移模块3a及该第二位移模块3b,使该第一位移模块3a及该第二位移模块3b可以如图5所示同步沿该第一参考方向y1位移(即向上或向下位移),以由该第一刮线4a及该第二刮线4b跨在该第一位移模块3a与该第二位移模块3b之间的部位刮除该抹灰区t1的不平整处,借此,可以自动化且快速地完成大面积的整平作业,且不过度依赖工作经验以降低人力成本。
32.特别说明的是,在其他实施例中,也可以将该第一升降导引件2a固定于该第一定位点p1与该第三定位点p3之间,将该第二升降导引件2b固定于该第二定位点p2与该第四定位点p4之间;以及将该第一位移模块3a可位移地连接于该第一升降导引件2a,将该第二位移模块3b可位移地连接于该第二升降导引件2b,使该第一位移模块3a及该第二位移模块3b可以同步沿该第二参考方向y2位移,使该第一位移模块3a及该第二位移模块3b可以向左或向右位移;如此,可以应用于长条形的墙面。
33.请参照图2所示,其是本实施例用来实施上述抹灰整平方法的一种抹灰整平套组,该抹灰整平套组系包括两个端边定位组件1、两个升降导引件2、两个位移模块3及两个刮线4,该两个升降导引件2分别固定于该两个端边定位组件1,该两个位移模块3分别可位移地连接于该两个升降导引件2,该两个刮线4分别绕经该两个位移模块3。
34.该两个端边定位组件1位于该墙面t,该两个端边定位组件1各具有在该第一参考方向y1上相对的一个第一定位模块1a及一个第二定位模块1b,该两个端边定位组件1的第一定位模块1a在该第二参考方向y2上相间隔,该两个端边定位组件1的第一定位模块1a可以分别形成该第一定位点p1与该第三定位点p3,该两个端边定位组件1的第二定位模块1b在该第二参考方向y2上相间隔,该两个端边定位组件1的第二定位模块1b可以分别形成该第二定位点p2与该第四定位点p4。
35.请参照图1、图2所示,该第一定位模块1a及该第二定位模块1b的形式本发明不加以限制,在本实施例中,该第一定位模块1a及该第二定位模块1b均可以具有一个穿线器12结合一个定位柱11,该定位柱11可以如图1所示先固设于该墙面t,使该定位柱11可以结合于该墙面t与该穿线器12之间,该穿线器12可以供该升降导引件2及该刮线4贯穿;该第一定位模块1a可以具有两个张紧件13,该两个张紧件13可以结合于该穿线器12且位于远离该第二定位模块1b的一端,该两个张紧件13可以供该升降导引件2及该刮线4贯穿,该两个张紧件13可用以张紧该升降导引件2及该刮线4。
36.又,该第一定位模块1a及该第二定位模块1b可以分别具有一个弹片14,该弹片14可以结合该穿线器12,该弹片14位于该定位柱11与该穿线器12之间,该弹片14的多个尖部141可以朝向该墙面t,一个螺丝f可以贯穿该穿线器12与该弹片14并螺接结合该定位柱11,借由该弹片14的多个尖部141抵接该墙面t,使该弹片14可以推抵该穿线器12接触该螺丝f的头部;如此,可以选择使该穿线器12较靠近该墙面t或较远离该墙面t,进而可以调整该刮线4与该墙面t之间的距离。
37.该两个升降导引件2分别固定于该两个端边定位组件1的第一定位模块1a与第二定位模块1b之间,该两个升降导引件2即为前述的第一升降导引件2a、第二升降导引件2b。该第一升降导引件2a与该第二升降导引件2b可以为轨道或线材;在本实施例中,该第一升降导引件2a与该第二升降导引件2b可以选择为线材,该第一升降导引件2a与该第二升降导引件2b可以贯穿该第一定位模块1a及该第二定位模块1b的穿线器12,使该第一升降导引件2a可以固定于该第一定位点p1与该第二定位点p2之间,以及使该第二升降导引件2b可以固定于该第三定位点p3与该第四定位点p4之间。又,该第一升降导引件2a与该第二升降导引件2b均可以贯穿该第一定位模块1a的其中一个张紧件13,使该其中一个张紧件13可以张紧该第一升降导引件2a与该第二升降导引件2b,可以避免该第一升降导引件2a与该第二升降导引件2b松脱或垂坠。
38.请参照图2、图3所示,该两个位移模块3分别可位移地连接于该第一升降导引件2a与该第二升降导引件2b,该两个位移模块3即为前述的第一位移模块3a、第二位移模块3b。该位移模块3可以具有一个本体31,该本体31具有相连通的一个第一结合槽311及一个第二结合槽312,该升降导引件2可以结合该第一结合槽311及该第二结合槽312,且该第一结合槽311及该第二结合槽312的开口方向较佳不位于同一个平面上,可以避免该升降导引件2脱离该本体31,使该本体31可以顺畅地相对该升降导引件2在该第一定位模块1a及该第二定位模块1b之间位移。
39.此外,该位移模块3可以具有一个第一齿轮32及一个第二齿轮33,该第一齿轮32及该第二齿轮33设于该本体31,该第一齿轮32及该第二齿轮33分别可以具有一个环槽321、331,该两个刮线4可以限位于该第一齿轮32及该第二齿轮33的该两个环槽321、331中。又,该位移模块3具有一个动力件34,该动力件34可以选择为一个步进马达,该动力件34的一个旋转齿轮341可以啮合于该第一齿轮32及该第二齿轮33,使该旋转齿轮341可以带动该第一齿轮32及该第二齿轮33旋转;较佳地,该动力件34还可以具有震动功能。
40.该两个刮线4可以绕经该第一位移模块3a及该第二位移模块3b,该两个刮线4即为前述的第一刮线4a、第二刮线4b。详言之,该第一刮线4a可以绕经该第一位移模块3a的第一齿轮32及该第二位移模块3b的第二齿轮33,且该第一刮线4a可以由第一端41固定于第一侧
a1的该端边定位组件1的第一定位模块1a,以及该第一刮线4a可以由第二端42固定于第二侧a2的该端边定位组件1的第二定位模块1b,使该第一刮线4a跨在该第一位移模块3a与该第二位移模块3b之间的部位可以接触该抹灰区t1。
41.另外,该第二刮线4b可以绕经该第二位移模块3b的第一齿轮32及该第一位移模块3a的第二齿轮33,且该第二刮线4b可以由第一端41固定于第二侧a2的该端边定位组件1的第一定位模块1a,以及该第二刮线4b可以由第二端42固定于第一侧a1的该端边定位组件1的第二定位模块1b,使该第二刮线4b跨在该第一位移模块3a与该第二位移模块3b之间的部位可以接触该抹灰区t1,且该第一刮线4a与该第二刮线4b跨在该第一位移模块3a与该第二位移模块3b之间的部位可以形成交叉。
42.其中,该第一刮线4a与该第二刮线4b均可以贯穿该第一定位模块1a的另一个张紧件13,使该另一个张紧件13可以张紧该第一刮线4a与该第二刮线4b,可以避免该第一刮线4a与该第二刮线4b松脱或垂坠。此外,该二个刮线4位于该第一定位模块1a与该位移模块3之间的线段、及位于该第二定位模块1b与该位移模块3之间的线段较佳均平行于一个第一参考方向y1;如此,该第一位移模块3a及该第二位移模块3b同步位移时,该两个刮线4可易于刮除不平整处。
43.请参照图4、图5所示,本发明的抹灰整平套组组装完成后,施工人员可以先抹灰以形成该抹灰区t1,再使用该抹灰整平套组进行整平的作业;或是,也可以施工人员一个边抹灰、一个边使用该抹灰整平套组进行整平的作业,本发明不加以限制。使用本发明的抹灰整平套组时,由该动力件34驱动该第一齿轮32及该第二齿轮33旋转,使该第一位移模块3a及该第二位移模块3b可以同步沿该第一参考方向y1位移,并由该第一刮线4a与该第二刮线4b跨在该第一位移模块3a与该第二位移模块3b之间的部位刮平该抹灰区t1,借此,可以自动化且快速地完成大面积的整平作业,且不过度依赖工作经验以降低人力成本。
44.又,由于该动力件34可以具有震动功能,在刮平的同时,该第一刮线4a与该第二刮线4b可以产生微震动,可以提升刮平的顺畅性。此外,在完成整平作业后,可以将前述的构件由该墙面t移除,并以人工方式将该抹灰区t1的周缘加以刮平,以使整个该抹灰区t1可以形成平整的形式。
45.综上所述,本发明的抹灰整平方法及套组,利用该两个位移模块可以相对该两个升降导引件位移,并由该第一刮线与该第二刮线跨在该第一位移模块与该第二位移模块之间的部位刮除该抹灰区的不平整处;借此,可以自动化且快速地完成大面积的整平作业,可以节省作业时间,且不过度依赖工作经验以降低人力成本,同时可以避免作业人员因技术不佳或体力不支而产生的问题,具有提升施工效率及质量的功效。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。