1.本发明涉及防护装置,具体涉及一种机器人传感器的防护装置。
背景技术:
2.在汽车自动化生产线,各种智能机器人通过传感器实现自动化流水作业。例如:abb-5400型喷涂机器人在汽车涂装生产线工作时,通过传感器实时监测喷涂齿轮泵的出入口压力值以及旋转换色阀的位置信号,确保机器人以正确的喷涂工艺参数进行工作。
3.通过生产实践发现,abb-5400型喷涂机器人安装的6个phoenixcontact传感器由于采用防爆型设计,使用塑料材质的安装接头,强度很低。在日常维修维护机器人时,经常在外力作用下折断,导致传感器损坏。由此造成大量更换备件、更换工时的浪费以及故障停机时间的增加。
4.如果更换其它型号或品牌的传感器,需要对机器人的软硬件进行重新安装和更新,势必浪费大量工时及成本费用,所以研制一种性能可靠的防护装置,不改变现有传感器状态,同时,消除上述传感器折断损坏现象,就成为亟待解决的问题。
技术实现要素:
5.本发明的目的是提供一种传感器的防护装置及防护装置组,不改变现有传感器状态,对传感器进行保护,进而消除传感器折断损坏现象。
6.为了实现上述目的,本发明的传感器防护装置,固定在端子盒上面,传感器防护装置包括:防护体、支腿,
7.防护体的上下表面之间具有高度,防护体的左、右侧面之间具有宽度,防护体的宽度大于传感器的宽度,
8.防护体具有至少一个防护孔,防护孔是贯穿防护体上下表面的通孔;防护孔的直径大于传感器直径;防护孔的侧壁设有剖分槽,剖分槽贯穿防护体的上下表面,同时,剖分槽还穿透防护体的左侧面或右侧面;
9.剖分槽的宽度小于防护孔的直径,同时,剖分槽的宽度大于线缆的直径;
10.支腿固定在防护体下部,支腿的高度小于传感器的高度;相邻支腿之间具有距离;
11.支腿具有螺孔。
12.本发明所述传感器的防护装置,包括固定在一起的上部防护体和下部支腿,由于支腿的高度小于传感器的高度、防护体具有高度,防护体具有贯穿防护体上下表面的防护孔,并且,防护孔的侧壁有剖分槽,安装使用时,无需拆卸传感器,直接通过剖分槽,将传感器上端的电缆嵌入到圆柱孔内,再向下套在传感器外,最后通过螺钉与支腿的螺孔配合,将防护装置与端子盒固定。传感器的防护装置套在传感器外部,防止了传感器损毁。
13.由于相邻支腿之间具有距离,固定传感器的螺母未被遮挡,该装置保护传感器同时,不影响传感器的拆装,同时,减少了防护装置的重量,对整个机器人正常运转的影响小。
14.优选的,所述剖分槽穿透防护体的左侧面时,所述支腿固定在靠近左侧面的防护
体下部。剖分槽穿透防护体的左侧面时,防护体左侧面会形成多个自由端,该自由端的形变范围大,将支腿固定在与自由端同侧,整个防护装置结构更稳。
15.优选的,所述支腿是l型,支腿包括支撑柱、底座,支撑柱的上部与防护体下部固定,支撑柱的下部与底座固定,螺孔设置在底座,螺钉穿过螺孔将传感器防护装置固定在端子盒上面。传感器固定在端子盒上面,将传感器防护装置也固定在端子盒上面,不会增加端子盒的宽度/长度,对整个机器人正常运转的影响小。
16.更优选的,所述螺孔是半圆槽孔,所述螺孔靠近支撑柱的部分是半圆形。半圆槽孔远离支撑柱部分开放,螺钉半固定在端子盒的螺孔时,底座的半圆槽孔的开放端,可以从螺钉与端子盒之间卡入/移除,便于传感器的防护装置的装/拆。
17.更优选的,所述防护体设有安装孔,安装孔是贯穿防护体上下表面的通孔,安装孔与螺孔同轴心。便于用六角扳手/螺丝刀从上向下穿过安装孔,旋紧固定底座的螺钉;同时,减轻了防护体重量,减少了对整个机器人正常运转的影响。
18.优选的,所述防护体的上下表面为阶梯型。本传感器的防护装置可以设有多个防护孔,同时对多个传感器进行保护,可以仅增加保护高传感器部分的防护体的高度,减少防护装置的重量,对整个机器人正常运转的影响小。
19.优选的,所述防护体的左右侧面为阶梯型。本传感器的防护装置可以设有多个防护孔,同时对多个传感器进行保护,可以仅增加保护粗传感器部分的防护体的宽度,减少防护装置的重量,对整个机器人正常运转的影响小。
20.优选的,所述支腿固定在两个相邻防护孔之间。支腿固定在防护体两端或两个相邻防护孔之间时,固定传感器的螺母未被遮挡,该装置保护传感器同时,不影响传感器的拆装。
21.本发明还提供一种传感器的防护装置组,包含多个上述传感器防护装置。
22.本发明所述传感器的防护装置,包括固定在一起的上部防护体和下部支腿,由于支腿的高度小于传感器的高度、防护体具有高度,防护体具有贯穿防护体上下表面的防护孔,并且,防护孔的侧壁有剖分槽,安装使用时,无需拆卸传感器,直接通过剖分槽,将传感器上端的电缆嵌入到圆柱孔内,再向下套在传感器外,最后通过螺钉与支腿的螺孔配合,将防护装置与端子盒固定。传感器的防护装置套在传感器外部,防止了传感器损毁。
23.由于相邻支腿之间具有距离,固定传感器的螺母未被遮挡,该装置保护传感器同时,不影响传感器的拆装,同时,减少了防护装置的重量,对整个机器人正常运转的影响小。
24.本发明所述传感器的防护装置组,将多个上述传感器防护装置组合使用,减少了部件种类,对多种传感器均可进行保护。
附图说明
25.图1为abb-5400型喷涂机器人的6个phoenix contact传感器安装在端子盒的结构示意图;
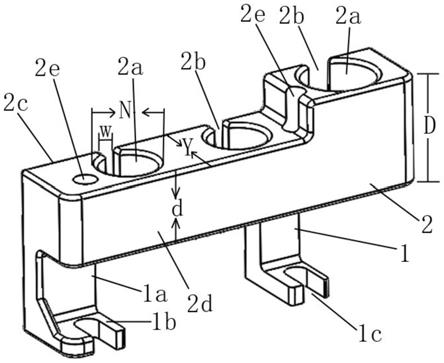
26.图2为本发明的传感器的防护装置一实施例立体图;
27.图3为图2所示传感器的防护装置安装在端子盒的示意图;
28.图4为本发明的传感器的防护装置另一实施例立体图;
29.图5为图4所示传感器的防护装置安装在端子盒的示意图;
30.图6为本发明的传感器的防护装置组一实施例立体图;
31.图7为图6所示传感器的防护装置组安装在端子盒的示意图;
32.图8为本发明的传感器的防护装置另一实施例立体图;
33.图9为本发明的传感器的防护装置另一实施例立体图。
34.主要元件符号说明:
35.支腿1、防护体2、传感器3、传感器4、端子盒5、线缆6
36.支撑柱1a、底座1b、支腿螺孔1c,螺钉1d
37.防护孔2a、剖分槽2b、防护体的左侧面2c、防护体的右侧面2d、安装孔2e
38.传感器固定螺母31
39.防护体的高度d、d,
40.防护体的宽度y,
41.传感器的宽度x,
42.剖分槽的宽度w,
43.防护孔的直径n
具体实施方式
44.为了更清楚说明本发明,现结合附图对本发明所述的传感器的防护装置及防护装置组作进一步详细描述。
45.如图1所示,为abb-5400型喷涂机器人的6个phoenix contact传感器安装在端子盒的结构示意图。传感器3、传感器4通过传感器固定螺母31 固定在端子盒5上面,线缆6从传感器3、传感器4的上部穿入。在日常维修维护机器人时,牵拉线缆6或外力碰撞传感器3、4,会导致传感器损坏。
46.如图2所示,为本发明的传感器的防护装置一实施例立体图,包括:防护体2、支腿1,防护体2的上下表面之间具有高度d,防护体的左侧面2c与右侧面2d之间具有宽度y,防护体的宽度y大于传感器的宽度x,防护体2具有3个防护孔2a,防护孔2a是贯穿防护体2上下表面的通孔;防护孔2a的直径大于传感器3或传感器4的直径;防护孔2a的侧壁设有剖分槽2b,剖分槽2b贯穿防护体的上下表面,同时,剖分槽2b还穿透防护体的左侧面2c;剖分槽的宽度w小于防护孔的直径n,同时,剖分槽的宽度w 大于线缆6的直径;支腿1固定在防护体2的下部,支腿1的高度小于传感器的高度;相邻支腿之间具有距离;支腿具有螺孔1c。
47.如图2、图3所示示例中,支腿1与防护体2的高度之和,小于传感器的高度,但是大于传感器高度的一半,约是传感器高度的80%-90%,此种高度的防护装置能保护传感器,同时体积小、重量轻;支腿1与防护体2的高度之和,也可以小于传感器高度的一半;当支腿1与防护体2的高度之和,大于传感器的高度时,对传感器保护效果最佳;
48.如图2所示,本示例中,剖分槽2b穿透防护体的左侧面2c,支腿1固定在靠近左侧面2c的防护体2的下部。由于剖分槽2b穿透防护体的左侧面 2c时,防护体左侧面2c会形成多个自由端(剖分槽侧壁),将支腿固定在与自由端同侧,整个防护装置结构更稳。
49.如图2、图3、图4、图5所示,支腿1是l型,支腿1包括支撑柱1a、底座1b,支撑柱1a的上部与防护体2靠近侧面的下部固定,支撑柱1a的下部与底座1b固定,本示例中,支腿1与防护体2为一体式结构,螺孔1c 设置在底座1b。螺钉1d穿过螺孔1c将传感器防护装置固定在
端子盒5上面。传感器3固定在端子盒5上面,将传感器防护装置也固定在端子盒5的上面,不会增加端子盒5的宽度/长度,对整个机器人正常运转的影响小。
50.如图2所示,螺孔1c是半圆槽孔,所述螺孔1c靠近支撑柱1a的部分是半圆形。半圆槽孔远离支撑柱部分开放,螺钉半固定在端子盒的螺孔时,底座的半圆槽孔的开放端,可以从螺钉与端子盒之间卡入/移除,便于传感器的防护装置的装/拆。
51.如图2所示,防护体2设有安装孔2e,安装孔2e是贯穿防护体上下表面的通孔,安装孔2e与螺孔1c同轴心。如图5所示,便于用六角扳手/螺丝刀从上向下穿过安装孔2e,旋紧固定底座的螺钉1d;同时,减轻了防护体重量,减少了对整个机器人正常运转的影响。
52.如图2、图3所示,传感器3、传感器4的高度不同,传感器4外部的防护体的高度d小于传感器3外部的防护体的高度d,即防护体2的上下表面为阶梯型。本传感器的防护装置设有多个防护孔,同时对多个传感器进行保护,仅增加保护高传感器部分的防护体的高度,减少防护装置的重量,对整个机器人正常运转的影响小。
53.如图4所示,为本发明的传感器的防护装置另一实施例立体图,图 5为图4所示传感器的防护装置安装在端子盒的示意图。
54.图4所示示例与图2所示示例,结构相同,剖分槽2b及支腿1设置在防护体2的右侧面2d。
55.如图4所示,支腿1固定在两个相邻防护孔2a之间。支腿固定在防护体两端或两个相邻防护孔之间时,固定传感器的螺母未被遮挡,该装置保护传感器同时,不影响传感器的拆装。
56.本发明所述传感器的防护装置,包括固定在一起的上部防护体和下部支腿,由于支腿的高度小于传感器的高度、防护体具有高度,防护体具有贯穿防护体上下表面的防护孔,并且,防护孔的侧壁有剖分槽,安装使用时,无需拆卸传感器,直接通过剖分槽,将传感器上端的电缆嵌入到圆柱孔内,再向下套在传感器外,最后通过螺钉与支腿的螺孔配合,将防护装置与端子盒固定。传感器的防护装置套在传感器外部,防止了传感器损毁。
57.由于相邻支腿之间具有距离,固定传感器的螺母未被遮挡,该装置保护传感器同时,不影响传感器的拆装,同时,减少了防护装置的重量,对整个机器人正常运转的影响小。
58.如图8所示,为本发明的传感器的防护装置另一实施例立体图。该示例中,支腿1仅包括支撑柱1a,螺孔1c位于支撑柱1a的下部,螺钉穿过螺孔1c将传感器的防护装置固定在端子盒的侧面。此种结构的支腿1,增加了端子盒的厚度,但是,拆装便捷、快速。
59.如图9所示,为本发明的传感器的防护装置另一实施例立体图。该示例中,剖分槽2b穿透防护体的左侧面2c,支腿1固定在靠近左侧面2c 的防护体2的下部;支腿1仅包括支撑柱1a,螺孔1c位于支撑柱1a的下部,螺钉穿过螺孔1c将传感器的防护装置固定在端子盒的侧面。本示例中,剖分槽2b所在的左侧面2c朝向端子盒内部,此种结构的支腿1,增加了端子盒的厚度,但是,拆装更便捷、快速,整体结构相比图8所示示例更稳固。
60.如图6为本发明的传感器的防护装置组一实施例立体图,图7为图 6所示传感器的防护装置组安装在端子盒的示意图。两个传感器防护装置的剖分槽2b都朝向端子盒中心,将多个传感器防护装置组合使用,减少了部件种类,对多种传感器均可进行保护,结构更稳固。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
