技术特征:
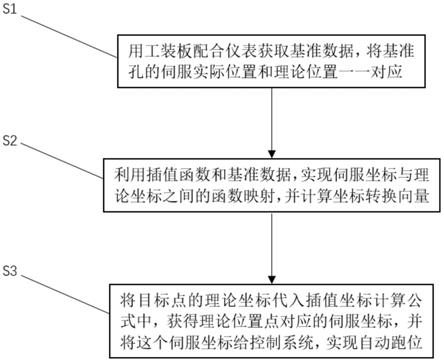
1.一种基于插值的伺服走位误差补偿方法,其特征在于,包括:步骤一,用工装板配合仪表获取基准数据,将基准点的伺服实际位置和理论位置一一对应;步骤二,利用插值函数和基准数据,实现伺服坐标与理论坐标之间的函数映射,并计算坐标转换向量;步骤三,将目标点的理论坐标代入插值坐标计算公式中,获得理论位置点对应的伺服坐标,并将这个伺服坐标给控制系统,实现自动跑位。2.如权利要求1所述的基于插值的伺服走位误差补偿方法,其特征在于,所述步骤一包括:用百分表配合基准板测定a、b、c、d四个基准点的伺服坐标位置。3.如权利要求2所述的基于插值的伺服走位误差补偿方法,其特征在于,所述步骤二包括:利用a、b、c、d四个基准点的伺服坐标与工装板上的理论位置,计算插值转化向量。4.如权利要求3所述的基于插值的伺服走位误差补偿方法,其特征在于,所述步骤三包括:确定需要进行插值计算的理论位置坐标,然后通过转化向量计算伺服系统中坐标值。5.如权利要求4所述的基于插值的伺服走位误差补偿方法,其特征在于,所述插值函数为:其中,(x
′ꢀ
y
′
)是理论坐标,(x y)是伺服轴的坐标,a
i
是待定系数。6.如权利要求5所述的基于插值的伺服走位误差补偿方法,其特征在于,所述a、b、、c、d四个基准点的坐标点计算方法为:四个基准点的坐标点计算方法为:7.如权利要求6所述的基于插值的伺服走位误差补偿方法,其特征在于,所述插值点的计算方法为:
8.如权利要求7所述的基于插值的伺服走位误差补偿方法,其特征在于,所述转化向量为:9.如权利要求2所述的基于插值的伺服走位误差补偿方法,其特征在于,还包括插值精度验证点e,所述验证点e设置于基准点a、b、c、d的中心位置。
技术总结
本发明公开了一种基于插值的伺服走位误差补偿方法,包括:步骤一,用工装板配合仪表获取基准数据,将基准点的伺服实际位置和理论位置一一对应;步骤二,利用插值函数和基准数据,实现伺服坐标与理论坐标之间的函数映射,并计算坐标转换向量;步骤三,将目标点的理论坐标代入插值坐标计算公式中,获得理论位置点对应的伺服坐标,并将这个伺服坐标给控制系统,实现自动跑位。通过采用插值法进行误差补偿技术按,能够在不破坏基准数及的前提下实现定位精度高。度高。度高。
技术研发人员:张世军 卢寅生
受保护的技术使用者:上海霍塔浩福自动化测试技术有限公司
技术研发日:2020.10.26
技术公布日:2022/5/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。