机械扩张器和医疗装置插入系统
1.优先权
2.本技术要求2020年11月13日提交的美国专利申请号63/113,719的优先权的权益,该申请通过引用并入本技术。
技术领域
3.本技术涉及医疗器械领域,更具体地涉及机械扩张器和医疗装置插入系统。
背景技术:
4.在医疗装置放置过程中,插入部位周围的组织必须扩张或扩展,以允许插入截面直径大于插入部位的医疗装置。扩展组织的过程可能涉及使用多个器械的多个步骤。此外,临床医生必须在视觉上确定插入部位周围的组织必须扩展多远以便于将医疗装置插入到插入部位中。视觉确定可能导致组织的过度扩展。能够仅使用一种器械更精确地扩张插入部位周围的组织对临床医生和患者将是有益的。本文公开了一种解决上述问题的设备、系统和方法。
技术实现要素:
5.本文公开了一种机械扩张器(dilator),该扩张器包括:通过支轴(fulcrum)联接至第二臂的第一臂,第一臂和第二臂协作地限定锁定及止动机构,该锁定及止动机构被配置为限制第一臂相对于第二臂的侧向运动;以及扩张器本体,具有从第一臂延伸的第一侧部和从第二臂延伸的第二侧部,其中,支轴被配置为将第一臂相对于第二臂的侧向运动转换为第一侧部相对于第二侧部的侧向运动。
6.在一些实施方案中,第一臂比第二臂更靠近扩张器本体的远端,或者第二臂比第一臂更靠近扩张器本体的远端。
7.在一些实施方案中,第一臂从第二臂侧向偏移。
8.在一些实施方案中,扩张器本体包括将扩张器本体二分(bisect)为第一侧部和第二侧部的通道。在一些实施方案中,通道包括一致的直径并且从第一臂和第二臂中的每个臂的近端延伸至扩张器顶端(tip)。
9.在一些实施方案中,锁定及止动机构包括构造成可滑动地接合第二锁定板的第一锁定板。
10.在一些实施方案中,第一锁定板联接至第一臂并且第二锁定板联接至第二臂。
11.在一些实施方案中,第一锁定板和第二锁定板均包括突片、多个脊、凹部和止动脊。
12.在一些实施方案中,机械扩张器可以被配置为在打开构造和闭合构造之间转变。
13.在一些实施方案中,在闭合构造中,第一侧部和第二侧部物理接触。
14.在一些实施方案中,在打开构造中,第一侧部和第二侧部以最大可能距离分开,第一锁定板的第一突片固定在第二锁定板的第二凹部中,而第二锁定板的第二突片固定在第
一锁定板的第一凹部中。
15.在一些实施方案中,扩张器本体通过压配合、卡扣配合或干涉配合可拆卸地联接至第一臂和第二臂。
16.在一些实施方案中,机械扩张器是一次性的或可重复使用的。
17.在一些实施方案中,第一臂和第二臂中的每个臂的近端包括倒角边缘。
18.本文还公开了一种包括导丝和构造成在导丝上滑动的机械扩张器的医疗装置插入系统。在一些实施方案中,机械扩张器包括通过支轴联接至第二臂的第一臂,第一臂和第二臂协作地限定锁定及止动机构。机械扩张器还包括扩张器本体,该扩张器本体包括从第一臂延伸的第一侧部和从第二臂延伸的第二侧部并包括被配置为在导丝上滑动的通道,该通道将扩张器本体二分成第一侧部和第二侧部,其中,支轴被配置为将第一臂相对于第二臂的运动转换为第一侧部相对于第二侧部的侧向运动。
19.在一些实施方案中,锁定及止动机构包括构造成可滑动地接合第二锁定板的第一锁定板。第一锁定板包括第一突片、多个第一脊、第一凹部和第一止动脊,并且第二锁定板包括第二突片、多个第二脊、第二凹部和第二止动脊。
20.在一些实施方案中,机械扩张器被配置为从闭合构造转变为打开构造。
21.在一些实施方案中,闭合构造包括物理接触的第一侧部和第二侧部。
22.在一些实施方案中,在打开构造中,第一侧部和第二侧部以最大可能距离分开,并且第一锁定板的第一突片固定在第二锁定板的第二凹部中,而第二锁定板的第二突片固定在第一锁定板的第一凹部中。
23.在一些实施方案中,机械扩张器在闭合构造中在导丝上滑动,或者机械扩张器在打开构造中在导丝上滑动。
24.在一些实施方案中,通道包括一致的直径。
25.在一些实施方案中,扩张器顶端是尖锐的以促进扩张器本体进入插入部位。
26.本文还公开了一种使用机械扩张器扩张插入部位的方法,包括将导丝插入到插入部位,使机械扩张器在导丝上滑动以进入插入部位,通过将机械扩张器从闭合构造移动到打开构造来扩张插入部位周围的组织,以及从导丝上移除机械扩张器。在一些实施方案中,机械扩张器包括通过支轴联接至第二臂的第一臂,第一臂和第二臂协作地限定锁定及止动机构,该锁定及止动机构被配置为限制第一臂相对于第二臂的侧向运动;机械扩张器具有扩张器本体,该扩张器本体包括从第一臂延伸的第一侧部和从第二臂延伸的第二侧部并包括通道,该通道将扩张器本体二分为第一侧部和第二侧部,其中,支轴被配置为将第一臂相对于第二臂的侧向运动转换为第一侧部相对于第二侧部的侧向运动。
27.在一些实施方案中,锁定及止动机构包括联接至第一臂的第一锁定板和联接至第二臂的第二锁定板。
28.在一些实施方案中,第一锁定板包括第一突片、多个第一脊、第一凹部和第一止动脊,并且第二锁定板包括第二突片、多个第二脊、第二凹部和第二止动脊。
29.在一些实施方案中,在闭合构造中,第一侧部和第二侧部彼此物理接触。
30.在一些实施方案中,在打开构造中,第一侧部和第二侧部以最大可能距离分开,第一锁定板的第一突片固定在第二锁定板的第二凹部中,而第二锁定板的第二突片固定在第一锁定板的第一凹部中。
31.在一些实施方案中,扩张插入部位周围的组织包括配置锁定及止动机构以防止插入部位的过度扩张。
32.在一些实施方案中,扩张插入部位周围的组织包括当机械扩张器处于打开构造时将细长医疗装置在导丝上滑动通过机械扩张器的通道进入插入部位。
33.在一些实施方案中,细长医疗装置包括导管。
34.在一些实施方案中,在导丝上滑动机械扩张器包括在打开构造中在导丝上滑动机械扩张器。
35.在一些实施方案中,在导丝上滑动机械扩张器包括在闭合构造中在导丝上滑动机械扩张器。
36.在一些实施方案中,在导丝上滑动机械扩张器包括在插入到插入部位之前将机械扩张器从打开构造转变为闭合构造。
37.鉴于附图和以下描述,本文提供的概念的这些和其他特征对于本领域技术人员来说将变得更加显而易见,附图和以下描述更详细地描述了这些概念的特定实施方案。
附图说明
38.将通过参考在附图中示出的公开文本的具体实施方案来呈现对公开文本的更具体的描述。应当理解,这些附图仅描绘了本实用新型的典型的实施方案,因此不应认为是对其范围的限制。将通过使用附图以额外的特性和细节描述和说明本实用新型的示例实施方案,其中:
39.图1a示出了根据一些实施方案的机械扩张器的侧视图。
40.图1b示出了根据一些实施方案的机械扩张器的透视图。
41.图2a示出了根据一些实施方案的扩张器本体的透视图。
42.图2b示出了根据一些实施方案的包括通道的扩张器本体的近端的平面图。
43.图3a示出了根据一些实施方案的联接至机械扩张器的锁定及止动机构的透视图。
44.图3b示出了根据一些实施方案的联接至机械扩张器的锁定及止动机构的截面图。
45.图4a-4b示出了根据一些实施方案的扩张机械扩张器的一种示例性方法的平面图。
46.图5a-5c示出了根据一些实施方案的在医疗装置插入系统中使用机械扩张器的示例性方法的透视图。
47.图6示出了根据一些实施方案的使用机械扩张器来扩张插入部位周围的组织的示例性方法的流程图。
具体实施方式
48.应当理解,在更详细地公开一些特定实施方案之前,本文公开的特定实施方案不限制本文提供的概念的范围。还应理解,本文公开的特定实施方案可具有可容易地与特定实施方案分离并可选地与本文公开的多个其他实施方案中的任何一个的特征组合或替代的特征。
49.关于本文使用的术语,还应当理解,这些术语是为了描述一些特定实施方案的目的,并且这些术语不限制本文提供的概念的范围。序数(例如,第一、第二、第三等)通常用于
区分或识别一组特征或步骤中的不同特征或步骤,并且不提供序列或数字限制。例如,“第一”、“第二”和“第三”特征或步骤不一定以该顺序出现,并且包括这样的特征或步骤的特定实施方案不一定限于这三个特征或步骤。诸如“左”、“右”、“顶”、“底”、“前”、“后”的标签是为了方便而使用,并不意味着例如任何特定的固定位置、取向或方向。相反,此类标签用于反映例如相对位置、取向或方向。除非上下文另有明确规定,否则“一种”、“一个”和“该”的单数形式包括复数引用。
50.关于“近侧”,例如,本文公开的机械扩张器的“近侧部分”或“近端部分”包括当机械扩张器用于患者时机械扩张器的旨在靠近临床医生的部分。同样,例如机械扩张器的“近侧长度”包括当机械扩张器用于患者时旨在靠近临床医生的机械扩张器的长度。例如,机械扩张器的“近端”包括当机械扩张器用于患者时机械扩张器的旨在靠近临床医生的端部。机械扩张器的近侧部分、近端部分或近侧长度可包括机械扩张器的近端;然而,机械扩张器的近侧部分、近端部分或近侧长度不需要包括机械扩张器的近端。即,除非上下文另有说明,否则机械扩张器的近侧部分、近端部分或近侧长度不是机械扩张器的末端部分或末端长度。
51.关于“远侧”,例如,本文公开的机械扩张器的“远侧部分”或“远端部分”包括当机械扩张器用于患者时机械扩张器的旨在靠近患者或位于患者体内的部分。同样,例如机械扩张器的“远侧长度”包括当机械扩张器用于患者时旨在靠近患者或位于患者体内的机械扩张器的长度。例如,机械扩张器的“远端”包括当机械扩张器用于患者时机械扩张器的旨在靠近患者或位于患者体内的端部。机械扩张器的远侧部分、远端部分或远侧长度可以包括机械扩张器的远端;然而,机械扩张器的远侧部分、远端部分或远侧长度不需要包括机械扩张器的远端。即,除非上下文另有说明,否则机械扩张器的远侧部分、远端部分或远侧长度不是机械扩张器的末端部分或末端长度。
52.除非另有定义,否则本文使用的所有技术和科学术语与本领域普通技术人员通常理解的含义相同。
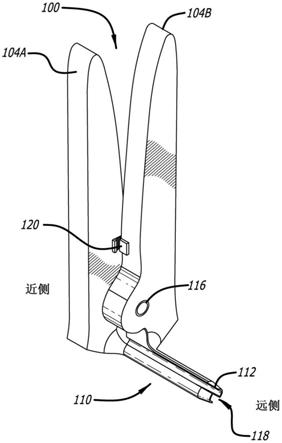
53.图1a示出了根据一些实施方案的机械扩张器100的侧视图。在一些实施方案中,机械扩张器100包括第一臂104a和第二臂104b。在一些实施方案中,扩张器本体110从第一臂104a的远端和第二臂104b的远端延伸。在一些实施方案中,扩张器本体110延伸至扩张器顶端112。在一些实施方案中,第一臂104a和第二臂104b共同限定锁定及止动机构120,该锁定及止动机构可被配置为限制第一臂104a相对于第二臂104b的侧向(lateral)运动。如图1a所示,在一些实施方案中,第一臂104a可以比第二臂104b更靠近扩张器本体110的远端。在一些实施方案中,第二臂104b可以比第一臂104a更靠近扩张器本体110的远端。在一些实施方案中,第一臂104a可以从第二臂104b侧向偏移。
54.图1b示出了根据一些实施方案的机械扩张器100的透视图。在一些实施方案中,机械扩张器100可以被配置为在闭合构造和打开构造之间转变。在一些实施方案中,第一臂104a可朝向第二臂104b压缩。在一些实施方案中,因为第一臂104a和第二臂104b被压缩在一起,所以第一臂104a的一部分接触第二臂104b的一部分。在一些实施方案中,锁定及止动机构120可以位于第一臂104a接触第二臂104b的位置。在一些实施方案中,第一臂104a和第二臂104b的形状可以包括矩形棱柱、锥形矩形棱柱、圆角矩形棱柱、长方体、圆柱体、五棱柱、六棱柱、其组合等。在一些实施方案中,第一臂104a和第二臂104b可以通过在其间延伸
的支轴116联接在一起。在一些实施方案中,支轴116将第一臂104a和第二臂104b的侧向运动转换为扩张器本体110的运动,这将在本文中更详细地描述。在一些实施方案中,扩张器本体110被通道118一分为二。
55.图2a示出了根据一些实施方案的扩张器本体110的透视图。如图2a所示,通道118将扩张器本体110分成两个相等的侧部,从第一臂104a延伸的第一侧部114a和从第二臂104b延伸的第二侧部114b。扩张器本体110可被配置为通过第一臂104a和第二臂104b的侧向运动侧向扩展或收缩。在一些实施方案中,扩张器本体110终止于扩张器顶端112,并且扩张器顶端112可以是渐缩的(tapered)。在一些实施方案中,扩张器顶端112可以是尖锐的以促进扩张器本体110进入插入部位。在一些实施方案中,扩张器本体110是圆柱形的。然而,也可以设想其他形状。有利地,扩张器本体110的圆柱形形状允许插入部位周围的组织的等周扩展。在一些实施方案中,等周扩展减少了皮肤的偏转并且允许产生插入部位的一致尺寸,从而导致医疗装置的一致放置。
56.在一个实施方案中,扩张器本体110可以可拆卸地联接至第一臂104a和第二臂104b。在一个实施方案中,扩张器本体110可以与第一臂104a和第二臂104b压配合、卡扣配合、干涉配合等。在本实施方案中,机械扩张器100和扩张器本体110可以分开设置,然后扩张器本体110可以在使用前联接至第一臂104a和第二臂104b。在一些实施方案中,具有通道118的不同直径117的各种扩张器本体110可以可拆卸地联接至机械扩张器100。使各种扩张器本体110可拆卸地联接至机械扩张器100上允许用户在使用前选择插入部位的期望扩张。在一些实施方案中,包括扩张器本体110的机械扩张器100可由金属(例如,钢、铝等)、塑料(例如,聚酯、聚乙烯、聚氯乙烯、聚丙烯等)或其组合构成。在一些实施方案中,机械扩张器100或其包括扩张器本体110的部分可被配置为可重复使用或一次性的。
57.图2b示出了根据一些实施方案的机械扩张器100的第一臂104a和第二臂104b的平面图。在一些实施方案中,通道118从机械扩张器100的近侧延伸至扩张器顶端112。在一些实施方案中,通道118可以被配置为具有穿过扩张器本体110的一致直径117。在一些实施方案中,通道118的近侧可以包括倒角边缘,其被构造成允许医疗装置在其中滑动。随着扩张器本体110侧向扩展,通道118的直径117也可以扩展。随着扩张器本体110侧向扩展,通道118的直径117也可以均匀扩展。在一些实施方案中,通道118的直径117可以扩展到大于细长医疗装置的截面直径,从而允许细长医疗装置的一部分移动通过通道118。
58.图3a示出了根据一些实施方案的锁定及止动机构120的第一锁定板122a的透视图。在一些实施方案中,机械扩张器100可以被配置为包括第一臂104a上的锁定及止动机构120的一部分和第二臂104b上的锁定及止动机构120的一部分。在一些实施方案中,锁定及止动机构120包括第一锁定板122a,该第一锁定板可被配置为可滑动地接合第二锁定板122b。在一些实施方案中,第一锁定板122a包括第一突片124a、从第一锁定板122a突出的多个第一脊126a、第一凹部128a和第一止动脊130a。在一些实施方案中,第一锁定板122a可以被配置为可滑动地接合第二突片124b。在一些实施方案中,机械扩张器100可包括联接至第一臂104a的第一锁定板122a和联接至第二臂104b的第二突片124b。
59.图3b示出了根据一些实施方案的联接至机械扩张器100的锁定及止动机构120的第一锁定板122a和第二锁定板122b的截面图。在一些实施方案中,第二锁定板122b包括第二突片124b、从第二锁定板122b突出的多个第二脊126b、第二凹部128b和第二止动脊130b。
在一些实施方案中,第一锁定板122a可以联接至第一臂104a,而第二锁定板122b可以联接至第二臂104b。当第一臂104a和第二臂104b被侧向压缩在一起时,第一突片124a与多个第二脊126b可滑动地接合,而第二突片124b与多个第一脊126a可滑动地接合。第一臂104a和第二臂104b可以被侧向压缩在一起,直到第一突片124a被固定在第二凹部128b内,而第二突片124b被固定在第一凹部128a内。第一止动脊130a防止第二突片124b和第二臂104b进一步侧向运动,而第二止动脊130b防止第一突片124a和第一臂104a进一步侧向运动。第一止动脊130a和第一凹部128a以及第二止动脊130b和第二凹部128b确保通道118可以被配置为打开到最大可能的直径。在一些实施方案中,多个第一脊126a可以被配置为具有与多个第二脊126b相同数量的脊。在一些实施方案中,多个第一脊126a内的每个脊可以被配置为具有多个第二脊126b内的对应脊。
60.在一个实施方案中,当第一突片124a经过多个第二脊126b中的每个脊并且第二突片124b经过多个第一脊126a中的每个脊时,可以通过可听见的声音(例如,咔哒声、砰砰声等)向用户通知第一突片124a在多个第二脊126b上行进以及第二突片124b在多个第二脊126b上行进。在该实施方案中,第一突片124a经过多个第二脊126b中的每个脊和第二突片124b经过多个第一脊126a中的每个脊的可听见的声音可以对应于扩张器本体110的扩展的增量增加。在一些实施方案中,锁定及止动机构120可包括第一突片124a在多个第二脊126b上行进和第二突片在多个第二脊126b上行进的视觉指示器。在一个实施方案中,视觉指示器可以包括多个第一脊126a中的每个脊和多个第二脊126b中每个对应的脊,所述脊具有与通道118的特定直径相对应的不同颜色。在该实施方案中,用户能够在视觉上确定扩张器本体110的扩张进展和通道118的直径117。在一些实施方案中,第一突片124a经过多个第二脊126b中的每个脊和第二突片124b经过多个第一脊126a中的每个脊的进展的可听声音和视觉指示器可以组合以给用户两种不同的机制来确定扩张器本体110的扩张进展和通道118的直径117。
61.在一些实施方案中,锁定及止动机构120可以针对通道118的最大直径117或第一侧部114a和第二侧部114b之间的最大距离进行预构造。例如,通道118的最大直径117可以被配置为大于用户选择的细长医疗装置的直径。在一些实施方案中,在第一凹部128a之前的多个第一脊126a中的脊的数量和在第二凹部128b之前的多个第二脊126b中的脊的数量可以增加,以被配置为增加通道118的最大直径。在一些实施方案中,用户可能希望通道118的直径小于通道118的最大直径。在第二突片124b可滑动地接合在第一凹部128a中并且第一突片可滑动地接合在第二凹部128b中之前,用户可以在沿着多个第一和第二脊126a/126b的任何位置停止第一突片124a和第二突片124b的前进。
62.在一些实施方案中,多个第一脊126a或多个第二脊126b中的每一者中的每个脊可以对应于通道118的直径的增加。在一些实施方案中,多个第一脊126a和多个第二脊126b中的每一者中的每个脊可以对应于通道118的增加的直径,该直径对应于弗伦奇导管标度(french catheter scale)。例如,在包括多个第一脊和多个第二脊中的五个脊和一个凹部的机械扩张器100中,使第一突片124a越过多个第二脊126b中的第一个脊并且使第二突片124b越过多个第二脊中的第一个脊可以扩展通道直径117以将12弗伦奇导管安装在其中。使第一突片124a越过多个第二脊中的第二个脊并且使第二突片124b越过多个第二脊中的第二个脊可以扩展通道直径117以将13弗伦奇导管安装在其中。将第一突片124a固定在第
二锁定板122b的第二个凹部中并且将第二突片124b固定在第一锁定板122a的第一个凹部中可以扩展通道直径117以将17弗伦奇导管安装在其中。
63.图4a-4b示出了根据一些实施方案的扩张机械扩张器100的示例性方法的平面图。支轴116允许第一臂104a相对于第二臂104b的侧向运动转换为通道118的直径117的增大或减小,并且第一侧部114a和第二侧部114b被侧向移动得更靠近在一起或离得更远。如图4a所示,第一臂104a可以被配置为侧向移动远离第二臂104b。使第一臂104a远离第二臂104b移动减小了通道118的直径117并且将第一侧部114a和第二侧部114b侧向带到一起。在一些实施方案中,当第一侧部114a和第二侧部114b物理接触时,机械扩张器100可以被配置为闭合构造。
64.如图4b所示,将第一臂104a和第二臂104b侧向压缩到一起增加了通道118的直径117,打破了第一侧部114a和第二侧部114b之间的物理接触。在一些实施方案中,当第一侧部114a和第二侧部114b不再物理接触并且相隔最大允许距离时,机械扩张器100可以被配置为打开构造。换句话说,机械扩张器100的打开构造包括当第一臂104a和第二臂104b被侧向压缩在一起并且通道直径117是用户以及锁定及止动机构120所允许的最大直径时的情况。在一些实施方案中,机械扩张器100可以在闭合构造中滑入插入部位。在一些实施方案中,将机械扩张器100在闭合构造和打开构造之间转变使包括一个或多个周围组织的插入部位扩张,如将在本文中更详细地描述的。在一些实施方案中,机械扩张器可以通过包括偏压构件(例如弹簧)而被偏压到闭合构造。在一些实施方案中,机械扩张器可通过包括偏压构件(例如弹簧)而被偏压到打开构造。在一些实施方案中,一旦机械扩张器100已经从闭合构造转变为打开构造,则机械扩张器可能不会转变回闭合构造。在一些实施方案中,一旦机械扩张器100已经从闭合构造转变为打开构造,则机械扩张器100可以通过手动重置锁定及止动机构120而转变回闭合构造。
65.图5a-5c示出了根据一些实施方案的在医疗装置插入系统200中使用机械扩张器100的示例性方法。在一些实施方案中,医疗装置插入系统200包括导丝202和机械扩张器100。如图5a所示,导丝202可以通过插入部位206插入到目标区域204中。在一些实施方案中,一旦导丝202被插入,则机械扩张器100,更具体地扩张器本体110,可以被配置为在闭合构造中在导丝202上滑动以可滑动地接合插入部位206,如图5b所示。更具体地,导丝202可以通过通道118插入并且机械扩张器100可以在导丝202上滑动。在一些实施方案中,机械扩张器100可以在打开构造中在导丝202上滑动,然后在插入到插入部位206之前转变为闭合构造。在一些实施方案中,如图5c所示,一旦机械扩张器100接合在插入部位206中,则机械扩张器100可被配置为通过相对于第二臂104b侧向压缩第一臂104a、相对于第二侧部114b侧向扩展第一侧部114a,或者简单地说,从闭合构造转变到打开构造,来扩张插入部位206。在一些实施方案中,锁定及止动机构120可以被配置为防止插入部位206周围的组织的过度扩张。
66.图6示出了根据一些实施方案的使用机械扩张器100来放置细长医疗装置的示例性方法300的流程图。在一些实施方案中,方法300包括将导丝202插入目标区域204中的插入部位206中(框302)。在一些实施方案中,目标区域204可以包括解剖目标(例如,血管等)。在一些实施方案中,导丝202可以通过插入针插入到插入部位206中。方法300进一步包括使处于闭合构造的机械扩张器100在导丝202上滑动以可滑动地接合插入部位206(框304)。在
一些实施方案中,扩张器本体110可以滑入插入部位206中直到扩张器本体110的一部分不再可见。在一些实施方案中,扩张器本体110可以滑入插入部位中直到整个扩张器本体110不再可见。在一些实施方案中,机械扩张器100可以在打开构造中在导丝202上滑动并且在插入到插入部位206之前转变为闭合构造。
67.方法300进一步包括使用机械扩张器100扩张插入部位206周围的组织(框306)。在一些实施方案中,扩张插入部位206周围的组织包括相对于第二臂104b侧向压缩第一臂104a以将第一侧部114a扩展远离第二侧部114b,从而扩展通道118。方法300进一步包括配置锁定及止动机构120以防止插入部位206的过度扩张(框308)。在一些实施方案中,配置锁定及止动机构120包括相对于第二臂104b侧向压缩第一臂104a直到第一突片124a固定在第二锁定板122b的第二凹部128b中并且第二突片124b固定在第一锁定板122a的第一凹部128a中。在一些实施方案中,配置锁定及止动机构120包括相对于第二臂104b侧向压缩第一臂104a直到第一突片124a被固定在第二锁定板的多个第二脊中的一个脊中,并且第二突片124b被固定在第一锁定板122a的多个第一脊中的一个脊中。
68.方法300进一步包括从插入部位206移除机械扩张器100(框310)。在一些实施方案中,从插入部位206移除机械扩张器100包括从处于打开构造的插入部位206移除机械扩张器100。在一些实施方案中,方法300包括在导丝202上滑动细长医疗装置、使其通过机械扩张器100的通道118滑入插入部位206的可选步骤(框309)。在一些实施方案中,细长医疗装置可包括导管或管心针。有利地,将机械扩张器100通过导丝202插入到插入部位确保组织的扩张沿着细长医疗装置将采取的路径发生。
69.虽然本文已经公开了一些特定实施方案,并且虽然已经详细公开了特定实施方案,但是特定实施方案的意图并不是限制本文提供的概念的范围。本领域普通技术人员可能会想到另外的适应和/或修改,并且在更广泛的方面,也包括这些适应和/或修改。因此,在不脱离本文提供的概念的范围的情况下,可以偏离本文公开的特定实施方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。