技术特征:
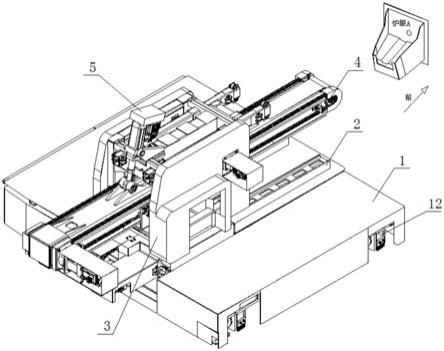
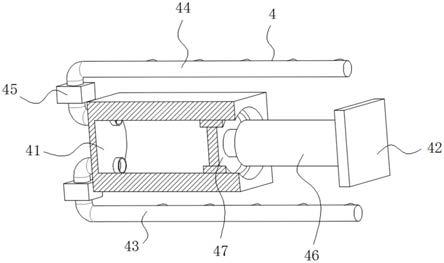
1.一种出炉机器人,其特征在于:包括环轨机构(1)、纵移机构(2)、回转机构(3)、伸缩小臂(4)和俯仰机构(5),所述环轨机构(1)安装在基础平面的轨道上,纵移机构(2)安装在环轨机构(1)上,纵移机构(2)在环轨机构(1)上完成沿炉眼a方向的前后移动,回转机构(3)设置在纵移机构(2)上,伸缩小臂(4)的前端与回转机构(3)的前端铰接,伸缩小臂(4)的后端与俯仰机构(5)的输出端铰接,俯仰机构(5)安装在回转机构(3)上。2.根据权利要求1所述的一种出炉机器人,其特征在于:所述环轨机构(1)包括移动平台(11)和驱动组件(12),所述移动平台(11)的底部安装有驱动组件(12),驱动组件(12)包括电机及减速器(121)、轮轴箱(122)和驱动轮(123),驱动轮(123)通过轴承和转轴转动安装在轮轴箱(122)内,电机及减速器(121)用于驱动驱动轮(123)转动。3.根据权利要求2所述的一种出炉机器人,其特征在于:所述纵移机构(2)包括纵移平台(21)、纵移行走轮(22)、纵移导轨(23)、纵移减速机(24)、纵移驱动齿轮(25)和纵移齿条(26),纵移行走轮(22)安装在纵移平台(21)上,所述移动平台(11)上安装有两条平行设置的纵移导轨(23),在两条纵移导轨(23)之间安装有纵移齿条(26),所述纵移平台(21)通过纵移行走轮(22)配合安装在纵移导轨(23)上,所述纵移减速机(24)安装在纵移平台(21)上,纵移减速机(24)的输出端安装有纵移驱动齿轮(25),纵移驱动齿轮(25)与纵移齿条(26)啮合安装。4.根据权利要求3所述的一种出炉机器人,其特征在于:所述回转机构(3)包括回转减速机(31)和支撑架(32),回转减速机(31)一端与纵移平台(21)连接,回转减速机(31)另一端与支撑架(32)连接。5.根据权利要求4所述的一种出炉机器人,其特征在于:所述伸缩小臂(4)包括驱动电机(41)、小臂支架(42)、第一导轨(43)、导向轮(44)、移动罩(45)和夹取机构(46),所述小臂支架(42)的两侧分别安装有第一导轨(43),移动罩(45)上安装有导向轮(44),移动罩(45)通过导向轮(44)配合安装在第一导轨(43)上,所述夹取机构(46)固定安装在移动罩(45)上,所述小臂支架(42)的两端分别安装有主动链轮(47)和从动链轮(48),驱动电机(41)固定安装在小臂支架(42)的端部,驱动电机(41)与主动链轮(47)配合安装,主动链轮(47)和从动链轮(48)上配合安装有链条(49),链条(49)的两端分别固定安装在移动罩(45)上。6.根据权利要求5所述的一种出炉机器人,其特征在于:所述俯仰机构(5)包括俯仰伸缩推杆(51)和推杆座(52),俯仰伸缩推杆(51)通过推杆座(52)安装在回转机构(3)的支撑架(32)上,伸缩小臂(4)的前端具有前铰接点(53),伸缩小臂(4)通过前铰接点(53)与回转机构(3)的支撑架(32)铰接安装,伸缩小臂(4)的后端具有后铰接点(54),俯仰伸缩推杆(51)的输出端与后铰接点(54)铰接安装。7.根据权利要求5或6所述的一种出炉机器人,其特征在于:所述夹取机构(46)包括驱动气缸(461)、工具座(462)和夹爪(464),工具座(462)的前端内部为外喇叭口形锥孔结构,工具座(462)上设置有夹爪(464),夹爪(464)的后端与驱动气缸(461)的输出端杠杆铰接。8.根据权利要求4所述的一种出炉机器人,其特征在于:还包括送料机构(6),所述送料机构(6)安装在回转机构(3)上;所述送料机构(6)包括传输机构(61)和回转料仓(62),回转料仓(62)固定安装在支撑架(32)上;所述传输机构(61)包括行走梁(611)、导向机构(612)、导向链轮(613)、传输减速机
(614)、主动传输链轮(616)、传输链条(617)和送料斗(618),导向机构(612)安装在支撑架(32)上,行走梁(611)滑动安装在导向机构(612)上,所述导向链轮(613)和传输减速机(614)安装在支撑架(32)上,传输减速机(614)的输出端安装有主动传输链轮(616),传输链条(617)依次与导向链轮(613)和主动传输链轮(616)配合安装,传输链条(617)的两端固定在行走梁(611)的左右两端,所述送料斗(618)通过送料斗铰接座(619)铰接安装在行走梁(611)的右端;所述回转料仓(62)包括内围板(621)、外围板(622)、底座(623)、托料盘(624)、回转行走机构(625)和推料气缸(629),回转料仓(62)通过底座(623)固定安装在支撑架(32)上,内围板(621)、外围板(622)和底座(623)形成回转行走空间,所述回转行走机构(625)安装在回转行走空间内,回转行走机构(625)上安装有多个托料盘(624),所述回转行走机构(625)包括多个承托座(6251),相邻的两个承托座(6251)通过第一销轴(6252)建立铰接关系,第一销轴(6252)上端安装有回转行走轴承(6253),所述回转行走轴承(6253)沿着内围板(621)的侧壁滚动,底座(623)上安装有回转驱动减速机(626),回转驱动减速机(626)的输出端安装有驱动转盘(627),所述驱动转盘(627)的外壁上阵列加工有多个第一凹槽(628),第一凹槽(628)与第一销轴(6252)相配合安装,所述推料气缸(629)安装在底座(623)上,行走梁(611)的一端安装有限位块(6110),限位块(6110)通过弹簧与行走梁(611)建立安装关系,钢丝绳(6181)的一端连接在送料斗(618)的底部,钢丝绳(6181)的另一端穿过行走梁(611)与限位块(6110)连接。9.根据权利要求8所述的一种出炉机器人,其特征在于:所述导向机构(612)包括导向槽(6121),导向槽(6121)为空心槽结构,在导向槽(6121)的两侧安装有导向轮组(6122),所述行走梁(611)安装在导向槽(6121)内,导向轮组(6122)用于支撑行走梁(611)在导向槽(6121)内滑动。10.根据权利要求8所述的一种出炉机器人,其特征在于:所述承托座(6251)包括上u形架(62511)和下u形架(62512),上u形架(62511)和下u形架(62512)内安装有圆环柱体(62513),所述托料盘(624)固定安装在圆环柱体(62513)上。
技术总结
一种出炉机器人,属于冶炼设备技术领域。本实用新型包括环轨机构、纵移机构、回转机构、伸缩小臂和俯仰机构,所述环轨机构安装在基础平面的环形轨道上,纵移机构安装在环轨机构上,纵移机构在环轨机构上完成沿炉眼A方向的前后移动,回转机构设置在纵移机构上,伸缩小臂的前端与回转机构的前端铰接,伸缩小臂的后端与俯仰机构的输出端铰接,俯仰机构安装在回转机构上。本实用新型适用于旋转矿热炉的开眼和堵眼工作,可远程操控进行,提高了出炉作业的安全性,使炉前作业能够自动完成,降低了作业人员的劳动强度以及人力成本。业人员的劳动强度以及人力成本。业人员的劳动强度以及人力成本。
技术研发人员:马琦 刘超 宋建建 谭建勋 宋旭智 汪立国 董云飞 于洪晨 金燕 姜海涛 刘罡 王维毅 隋成友 孙掖君 宋春波 韩守国
受保护的技术使用者:哈尔滨博实自动化股份有限公司
技术研发日:2021.12.15
技术公布日:2022/5/15
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。