1.本实用新型涉及一种电泳载具导电杯自动除漆装置。适用于汽车涂装技术领域。
背景技术:
2.目前在整车翻转电泳领域,ro-dip载具导电杯内铜块普遍存在积漆的问题,由设备保全控制ro-dip输送链点动前进及停止,并使用充电式电钻搭配铜丝刷对铜块进行打磨清洁。因该方法是由人工对载具进行点动前进、打磨操作,作业强度高,所需人数多,效率较低,作业时伴随着设备运转的噪音和水滴,工作环境较差,且作业人员需要手持工具仰着头作业,长此以往将对员工造成一定的健康危害。另外,因人工打磨存在每个作业人员的作业手法轻重均有不同的问题,会造成打磨过程中铜块磨损过度减少寿命或打磨过少无法有效清除积漆的后果。
技术实现要素:
3.本实用新型要解决的技术问题是:为解决上述对员工造成健康损害及导电杯内铜块清洁不均匀的问题,本实用新型提供一种电泳载具导电杯自动除漆装置。
4.本实用新型所采用的技术方案是:一种电泳载具导电杯自动除漆装置,用于清理电泳载具上导电杯内铜块上附着的电泳漆,其特征在于,具有:
5.底座;
6.位置传感器,安装在底座上,用于获取电泳载具的位置信息;
7.位置传感系统,安装在底座上,用于获取铜块清洁机构、清洁机构运输机构和同步挡臂机构的位置信息;
8.铜块清洁机构,用于清洁铜块上附着的电泳漆;
9.清洁机构运输机构,安装在底座上,用于运输铜块清洁机构;
10.同步挡臂机构,安装在清洁结构运输机构上并与电泳载具可拆卸配合,用于使铜块清洁机构与运动的电泳载具保持同步运动;
11.控制终端,与位置传感器、位置传感系统、铜块清洁机构、清洁机构运输机构及同步挡臂机构通讯连接,用于获取位置传感器获取的电泳载具位置信息及控制铜块清洁机构、清洁机构运输机构及同步挡臂机构运动。
12.所述底座具有两个固定安装在地面上的轨道立柱,两个导轨立柱之间安装有第一滑轨。
13.所述清洁机构运输机构具有第一伸缩气缸及托盘,所述第一伸缩气缸固定安装在底座上,第一伸缩气缸的伸缩杆端部与托盘固定连接,托盘可滑动的安装在底座上。
14.所述铜块清洁机构具有支架,所述支架固定安装在清洁机构运输机构上,在支架上沿竖直方向布置有第二滑轨,在所述第二滑轨上可滑动地安装有驱动电机,驱动电机的输出轴上通过弹簧可调节地安装有清洁刷头,在所述支架上固定安装有第二伸缩气缸,第二伸缩气缸的伸缩杆端部与驱动电机固定连接。
15.所述同步挡臂机构具有固定安装在清洁机构运输机构上的第三伸缩气缸,所述第三伸缩气缸的伸缩杆端部固定连接有与电泳载具配合的夹爪。
16.所述位置传感系统具有位置传感器a,位置传感器a安装在底座的第一轨道上,用于获取第一气缸及托盘的位置信息。
17.所述位置传感系统具有位置传感器b,位置传感器b安装在第二滑轨上,用于获得第二滑轨上铜块清洁机构的位置信息。
18.所述位置传感系统具有位置传感器c,位置传感器c安装在同步挡臂机构上,用于获得第三伸缩气缸的位置信息。
19.本实用新型的有益效果是:通过位置传感器实时获取电泳载具位置信息并发送至控制终端,控制终端通过分析获取的电泳载具位置信息并控制铜块清洁机构、清洁机构运输机构及同步挡臂机构,使清洁刷头与运动中的电泳载具实时保持同步运动,并使清洁刷头能保持与铜块均匀的接触,使每次清洁铜块时保持一致,避免因操作原因导致的铜块打磨过程中铜块磨损过度减少寿命或打磨过少无法有效清除积漆的后果。安装位置传感器a、位置传感器b、位置传感器c便于当出现工作失误,既当第一伸缩气缸、第二伸缩气缸或第三伸缩气缸伸出时间过长,而导致伸缩气缸未及时收回时,通过安装的位置传感器获取各伸缩气缸的伸出长度,各伸缩气缸的伸出长度达到预设值时,发出位置信号用于控制伸缩气缸收回。
附图说明
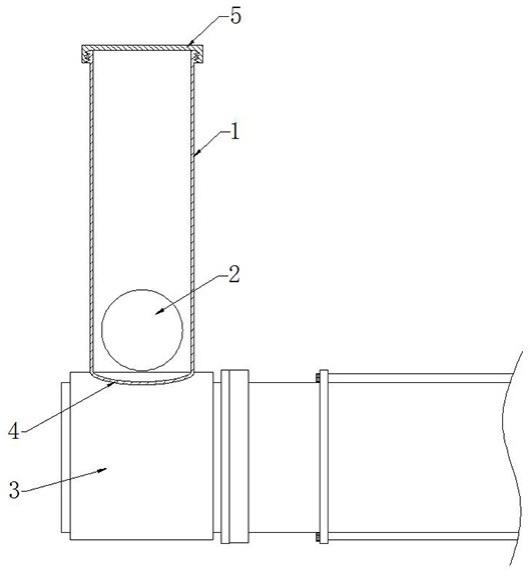
20.图1:本实用新型的一种结构示意图。
21.图2:本实用新型的结构框图。
22.图中:1、导轨立柱,2、第一滑轨,3、第一伸缩气缸,4、托盘,5、支架,6、第二滑轨,7、第二伸缩气缸,8、电机,9、清洁刷头,10、第三伸缩气缸,11、夹爪,12、电泳载具,13、导电杯,14、铜块,15、位置传感器,16、位置传感器a,17、位置传感器b,18、位置传感器c,20、底座。
具体实施方式
23.本实施例为一种电泳载具导电杯自动除漆装置,具有底座20、铜块清洁机构、清洁机构运输机构、及控制上述铜块清洁机构、清洁机构运输机构、同步挡臂机构运动的控制终端16。
24.本实施例中,所述底座20具有两个固定安装在地面上的轨道立柱,并在两个轨道立柱之间安装有第一滑轨2。在第一滑轨2上可滑动地安装有托盘4,在一侧的导轨立柱1上固定安装有第一伸缩气缸3,所述第一伸缩气缸3的伸缩杆端部与托盘4固定连接。如此通过第一伸缩气缸3上伸缩杆的伸出与缩回可以实现托盘4在第一滑轨2上可控制的滑动。本实施例中具有位置传感器a21,位置传感器a21安装在底座的第一轨道2上,用于获取第一气缸3及托盘4的位置信息。
25.在本实施例中,在底座20上安装有位置传感器15,用于实时获取在运动的电泳载具12位置信息,并将电泳载具12位置信息上传至控制终端16内。
26.本实施例中,在上述托盘4上固定安装有第三伸缩气缸10,所述第三伸缩气缸10的伸缩端部固定连接有与电泳载具12配合的夹爪11。如此在位置传感器15获取电泳载具12位
置信息并上传至控制终端16后由控制终端16控制电三伸缩气缸伸出,使夹爪11与电泳载具12配合而使电泳载具12与托盘4时刻保持同步运动。本实施例中具有位置传感器c23,位置传感器c23安装在同步挡臂机构上,用于获得第三伸缩气缸10的位置信息。
27.本实施例中,在托盘4上固定安装有支架5,在支架5上沿竖直方向布置有第二滑轨6,在第二滑轨6上可滑动地安装有驱动电机8,驱动电机8的输出轴上通过弹簧可调节地安装有清洁刷头9,第二伸缩气缸7固定安装在支架5上,所述驱动电机8通过安装在第二伸缩气缸7的伸缩杆端部上实现驱动电机8可沿第二滑轨6移动。本实施例中具有位置传感器b22,位置传感器b22安装在支架5上,用于获得第二滑轨6上铜块清洁机构的位置信息。如此,便于当各伸缩气缸发生工作意外,既在控制伸缩气缸伸出时间段后未控制伸缩气缸缩回的情况下,伸缩气缸仍向前伸出。在该种情况下,通过实时获取伸缩气缸的伸出长度信息并发送至控制终端内,与预设的伸缩气缸伸出长度进行对比,若伸缩气缸的伸出长度超出预设的伸缩气缸伸出长度,由控制终端控制伸缩气缸进行收回。增加电泳载具导电杯自动除漆装置工作过程中的安全性。
28.本实施来的实现原理为:
29.在电泳载具12移动至该电泳载具导电杯自动除漆装置工作位置时,安装在底座20上的位置传感器15实时获取在移动中的电泳载具12并上传至控制终端16内,控制终端16接收并分析电泳载具12位置信息,并控制第三伸缩气缸10伸出伸缩杆,使固定安装在第三伸缩气缸10伸缩杆端部的夹爪11与电泳载具12配合,第一伸缩气缸3及托盘4与第三伸缩气缸10保持同步平移运动,托盘4及安装在托盘4上的铜块14清洁机构能与电泳载具12保持同步;同时由控制终端16控制第二伸缩气缸7伸出第二伸缩气缸7伸缩杆,使安装在支架5上的电机8及清洁刷头9向上移动,使清洁刷头9与铜块14接触,由控制终端16控制驱动电机8并带动清洁刷头9转动实现对铜块14的除漆工作。在清洁一定时间后,由控制终端16控制第一伸缩气缸3、第二伸缩气缸7及第三伸缩气缸10缩回第一伸缩气缸3伸缩杆、第二伸缩气缸7伸缩杆及第三伸缩气缸10伸缩杆,使电泳载具12导电杯13自动除漆装置回归初始状态并等待下一个电泳载具12移动至该电泳载具导电杯自动除漆装置工作位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。