技术特征:
1.一种椭圆偏振仪,包括:源,所述源沿路径发射光;偏振器,所述偏振器使所述光偏振以产生样品光束,所述样品光束与样品相互作用并且被反射以产生反射光束;补偿器,所述补偿器安置于所述样品光束或所述反射光束的路径中,所述补偿器诱导所述光的偏振状态的相位延迟,其中,所述偏振器和所述补偿器中的至少一者围绕与所述光的传播方向平行的轴线旋转;分束器,所述分束器定位于所述补偿器之后、在所述反射光束的路径中,所述分束器被定位成接收所述反射光束并将所述反射光束的第一部分引导到聚焦系统并将所述反射光束的第二部分引导到分析仪,其中,所述反射光束的第一部分和所述反射光束的第二部分两者均包括所述反射光束的整个横截面;所述聚焦系统被定位成从所述分束器接收所述反射光束的第一部分,所述聚焦系统包括:透镜系统,所述透镜系统接收所述反射光束的第一部分,所述透镜系统将与所述椭圆偏振仪的最佳聚焦位置的任何偏差放大;和第一检测器,所述第一检测器被定位成从所述透镜系统接收所述反射光束的第一部分,其中,所述第一检测器包括二维传感器,并且所述聚焦系统中的透镜系统在所述二维传感器上产生斑并且所述二维传感器产生所述斑的图像;所述分析仪被定位成从所述分束器接收所述反射光束的第二部分;第二检测器,所述第二检测器被定位成从所述分析仪接收所述反射光束;和处理器,所述处理器接收所述图像并且被配置成在所述图像中获取所述斑在所述二维传感器上的位置,以确定与所述椭圆偏振仪的最佳聚焦位置的偏差。2.根据权利要求1所述的椭圆偏振仪,其中,所述处理器被配置成使用所述斑在所述二维传感器上的单个图像确定与所述椭圆偏振仪的最佳聚焦位置的偏差。3.根据权利要求1所述的椭圆偏振仪,其中,所述偏振器和所述补偿器中的所述至少一者的旋转使得随着所述偏振器和所述补偿器中的所述至少一者旋转,所述斑的位置在所述二维传感器上移动,其中,所述处理器被配置成对由所述偏振器和所述补偿器中的所述至少一者的旋转引起的所述斑的位置在所述二维传感器上的移动进行补偿。4.根据权利要求3所述的椭圆偏振仪,其中,所述处理器被耦合以接收角位置信号,所述角位置信号指示所述偏振器和所述补偿器中的所述至少一者的角位置,其中,所述处理器被配置成使用所述角位置信号对由所述偏振器和所述补偿器中的所述至少一者的旋转引起的所述斑的位置在所述二维传感器上的移动进行补偿。5.根据权利要求1所述的椭圆偏振仪,还包括用于改变所述椭圆偏振仪的焦点位置的致动器,其中,所述致动器基于与所述最佳聚焦位置的偏差改变所述椭圆偏振仪的焦点位置。6.根据权利要求1所述的椭圆偏振仪,其中,所述分束器是薄膜分束器。7.根据权利要求1所述的椭圆偏振仪,其中,所述透镜系统将与所述椭圆偏振仪的最佳聚焦位置的任何偏差放大到至少2x。8.根据权利要求1所述的椭圆偏振仪,其中,由所述透镜系统聚焦于所述二维传感器上
的斑的大小是所述二维传感器的50%或更小。9.一种聚焦椭圆偏振仪的方法,所述方法包括:沿路径产生光;使所述光偏振以产生样品光束,所述样品光束与样品相互作用并且被反射以产生反射光束;诱导所述样品光束或所述反射光束中的光的偏振状态的相位延迟;使所述偏振或所述偏振状态的相位延迟中的至少一者旋转;分离所述反射光束并沿第一路径引导所述反射光束的第一部分并且沿第二路径引导所述反射光束的第二部分,其中,所述反射光束的第一部分和所述反射光束的第二部分两者均包括所述反射光束的整个横截面;将所述反射光束的第一部分在二维传感器上聚焦到斑中,其中,将与所述椭圆偏振仪的最佳聚焦位置的任何偏差放大;产生所述斑的图像;在所述图像中确定所述斑在所述二维传感器上的位置;使用所述斑在所述二维传感器上的位置确定与所述最佳聚焦位置的偏差;基于与所述最佳聚焦位置的偏差调整所述椭圆偏振仪的焦点位置;分析所述反射光束的第二部分的偏振状态;以及检测所述反射光束的所分析的第二部分。10.根据权利要求9所述的方法,其中,使用所述斑在所述二维传感器上的单个图像确定与所述最佳聚焦位置的偏差。11.根据权利要求9所述的方法,其中,使所述偏振或所述偏振状态的相位延迟中的至少一者旋转使得所述斑的位置在所述二维传感器上移动,所述方法还包括对所述斑的位置在所述二维传感器上的移动进行补偿。12.根据权利要求11所述的方法,还包括提供所述偏振或所述偏振状态的相位延迟中的所述至少一者的角位置的指示;并且使用所述偏振或所述偏振状态的相位延迟中的所述至少一者的角位置的指示对所述斑的位置在所述二维传感器上的移动进行补偿。13.根据权利要求9所述的方法,其中,通过薄膜分束器执行分离所述反射光束并沿所述第一路径引导所述反射光束的第一部分并且沿所述第二路径引导所述反射光束的第二部分。14.根据权利要求9所述的方法,其中,将与所述椭圆偏振仪的最佳聚焦位置的任何偏差放大到至少2x。15.根据权利要求9所述的方法,其中,所述斑的大小是所述二维传感器的50%或更小。16.一种椭圆偏振仪,包括:源,所述源沿路径发射光;偏振器,所述偏振器使所述光偏振以产生样品光束,所述样品光束与样品相互作用并且被反射以产生反射光束;补偿器,所述补偿器安置于所述样品光束或所述反射光束的路径中,所述补偿器诱导所述光的偏振状态的相位延迟;分析仪,所述分析仪定位在所述补偿器之后、在所述反射光束的路径中,其中,所述偏
振器、所述补偿器和所述分析仪中的至少一者围绕与所述光的传播方向平行的轴线旋转;聚焦系统,所述聚焦系统定位在所述补偿器之后并且在所述分析仪之前、在所述反射光束的路径中,所述聚焦系统包括:分束器,所述分束器被定位成接收所述反射光束并将所述反射光束的第一部分引导到透镜系统并且将所述反射光束的第二部分引导到所述分析仪,其中,所述反射光束的第一部分和所述反射光束的第二部分两者均包括所述反射光束的整个横截面;所述透镜系统被定位成接收所述反射光束的第一部分并将所述反射光束的第一部分引导到第一检测器,所述透镜系统将与所述椭圆偏振仪的最佳聚焦位置的任何偏差放大;和所述第一检测器被定位成从所述透镜系统接收所述反射光束的第一部分,其中,所述第一检测器包括二维传感器并且所述聚焦系统中的透镜系统在所述二维传感器上产生斑并且所述二维传感器产生所述斑的图像;第二检测器,所述第二检测器被定位成从所述分析仪接收所述反射光束;和处理器,所述处理器接收所述图像并且被配置成在所述图像中获取所述斑在所述二维传感器上的位置,以确定与所述椭圆偏振仪的最佳聚焦位置的偏差。17.根据权利要求16所述的椭圆偏振仪,其中,所述处理器被配置成使用所述斑在所述二维传感器上的单个图像确定与所述椭圆偏振仪的最佳聚焦位置的偏差。18.根据权利要求16所述的椭圆偏振仪,其中,所述偏振器和所述补偿器中的所述至少一者的旋转使得随着所述偏振器和所述补偿器中的所述至少一者旋转,所述斑的位置在所述二维传感器上移动,其中,所述处理器被配置成对由所述偏振器和所述补偿器中的所述至少一者的旋转引起的所述斑的位置在所述二维传感器上的移动进行补偿。19.根据权利要求18所述的椭圆偏振仪,其中,所述处理器被耦合以接收角位置信号,所述角位置信号指示所述偏振器和所述补偿器中的所述至少一者的角位置,其中,所述处理器被配置成使用所述角位置信号对由所述偏振器和所述补偿器中的所述至少一者的旋转引起的所述斑的位置在所述二维传感器上的移动进行补偿。20.根据权利要求16所述的椭圆偏振仪,还包括用于改变所述椭圆偏振仪的焦点位置的致动器,其中,所述致动器基于与所述最佳聚焦位置的偏差改变所述椭圆偏振仪的焦点位置。21.根据权利要求16所述的椭圆偏振仪,其中,所述分束器是薄膜分束器。22.根据权利要求16所述的椭圆偏振仪,其中,所述透镜系统将与所述椭圆偏振仪的最佳聚焦位置的任何偏差放大到至少2x。23.根据权利要求16所述的椭圆偏振仪,其中,由所述透镜系统聚焦于所述二维传感器上的斑的大小是所述二维传感器的50%或更小。
技术总结
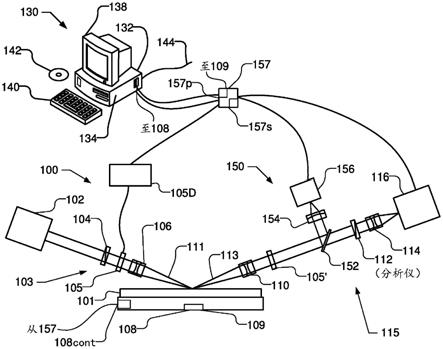
椭圆偏振仪包括聚焦系统,该聚焦系统使用测量斑的图像确定用于椭圆偏振仪的最佳焦点位置。聚焦信号通过在由偏振器分析信号之前分离椭圆偏振仪测量斑来产生,从而避免对具有调制强度的该斑进行成像。该聚焦信号在传感器阵列上成像,并且基于该斑在该传感器阵列上的该位置,可以确定该椭圆偏振仪的该焦点位置。单个图像可用于确定该椭圆偏振仪的该焦点位置,从而允许实时聚焦位置测量。从而允许实时聚焦位置测量。从而允许实时聚焦位置测量。
技术研发人员:J
受保护的技术使用者:昂图创新有限公司
技术研发日:2020.09.29
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。