用于处理车辆的gps路线数据的方法
技术领域
1.本发明涉及一种按照在权利要求1的前序部分中详细定义的类型的用于处理车辆的gps路线数据的方法。此外,本发明还涉及一种用于执行该方法的控制器。
背景技术:
2.例如由文献de 10 2010 028 671a1已知一种用于运行传动系的方法。在该方法中使用马达控制装置来控制驱动机组,其中,由导航系统提供有关在机动车前方的行驶路线的数据,并且其中,变速器控制装置根据由导航系统提供的数据自动地触发在变速器中的换挡和/或基于变速器控制装置在变速器中的换挡实施、调整或选择自动的参数组。因此借助导航系统的数据相应地调整换挡过程。
3.此外还已知的是,在处理gps路线数据时可能由于gps接收器的错误的信号而出现错误并且由此导致了错误的车辆路线引导。
技术实现要素:
4.本发明所要解决的问题是,建议一种本文开头所述类型的方法以及一种用于执行该方法的控制器,该控制器改进车辆路线引导。
5.按照本发明,这个技术问题通过专利权利要求1或10的特征解决。有利的和要求保护的扩展设计方案由从属权利要求和说明书以及附图得出。
6.因此建议了一种用于处理车辆的gps路线数据的方法,在该方法中,gps路线数据被用于车辆路线引导,其中,产生车辆定位和越野模式定位信息或公路模式定位信息作为路线数据。为了进一步优化车辆路线引导而规定,当由gps路线数据产生或检测到错误的车辆定位时,使用车辆定位计算功能用于车辆路线引导。
7.以这种方式,能利用所建议的方法用车辆定位计算功能的预先计算出的车辆定位来替代错误的或不可信的gps路线数据并且因此明显改善车辆路线引导。因此在来自gps路线数据的车辆定位错误时,使用由车辆定位计算功能预先计算出的车辆定位用于车辆路线引导。
8.车辆定位计算功能例如可以借助车辆的速度信号预先计算用于车辆路线引导的相应的车辆定位。这些在内部计算的车辆定位被用作是针对来自gps路线数据的定位的替代值,这是因为gps定位信号是错误的或无效的。为了预先计算车辆定位,也可以使用车辆的其它信号。
9.通过车辆定位计算功能计算车辆定位可以与特定的前提条件相关联。作为可能的前提条件,可以例如在通过车辆定位计算功能计算车辆定位期间使用车辆的越野模式驶过的行驶路线。若达到了越野模式驶过的行驶路线的预先确定的阈值,那么可以例如禁用车辆定位计算功能并且结束预先计算或结束用这些预先计算出的车辆定位的车辆路线引导。以这种方式可以一定程度上进行车辆定位重置并且再次利用最初使用的或当前有效的gps路线数据来进一步实施车辆路线引导。
10.原则上在所建议的方法的范畴中监控:是否出现公路模式定位信息或越野模式定位信息。定位由此例如在已经激活的、保持在待机模式中的车辆定位计算功能的情况下,如果检测到越野模式定位信息,则可以通过相应地预先计算出的车辆定位来承担车辆路线引导。
11.越野模式定位信息意味着,根据所检测到的gps路线数据,车辆处在公路外并且因此存在错误的公路模式信号或公路信号。如果存在公路模式定位信息,那么车辆处在公路上,因而可以使用gps路线数据用于车辆路线引导。
12.本发明的另一方面涉及对用于执行上述方法的控制器的保护。
附图说明
13.接下来借助附图进一步说明本发明。图中:
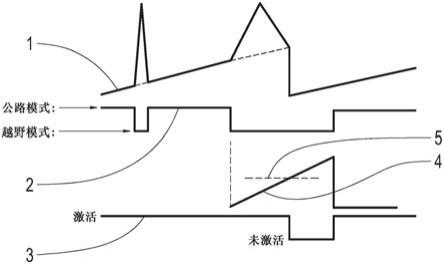
14.图1示意性示出了用于车辆路线引导的车辆路线的变化曲线、公路模式和越野模式定位信息的变化曲线以及激活和禁用车辆定位计算功能的变化曲线和越野模式驶过的行驶路线的变化曲线;并且
15.图2是按本发明的方法的一种可能的实施方案的流程图。
具体实施方式
16.在图1中在图的上部示出了由各个车辆定位构成的行驶路线的变化曲线1。在所示的车辆路线的变化曲线1下方,通过对越野模式和公路模式定位信息的检测示出了越野模式和公路模式激活的变化曲线2。这意味着,车辆在检测公路模式定位信息时处在公路上,车辆在检测越野模式定位信息时则处在公路外。
17.在变化曲线2的下方示出了另一条变化曲线3,其表明车辆定位计算功能的激活的和未激活的或禁用的状态。
18.在公路模式激活和越野模式激活的变化曲线2和有关车辆定位计算功能的激活和禁用的变化曲线3之间示出了在越野模式中驶过的行驶路线的变化曲线4。越野模式驶过的行驶路线随着从公路模式切换到越野模式开始并且受到越野模式驶过的行驶路线的预先确定的阈值5的限制。
19.由沿着行驶路线的变化曲线1可知,只要车辆处于公路模式,就先将gps路线数据用于车辆路线引导。由变化曲线2可知,在车辆路线引导的预先确定的时间之后,由于错误的gps路线数据而导致了越野模式状态,该越野模式状态可以通过越野模式定位信息检测到并且由变化曲线2可知。
20.在这个时间点,存在来自错误的gps路线数据的错误的车辆定位,这通过变化曲线1中的强烈的上升表明。这些错误的车辆定位不能用于进一步的车辆路线引导。因此当这种错误的车辆定位由gps路线数据产生时,使用由车辆定位计算功能预先计算出的车辆定位用于车辆路线引导。
21.在车辆定位计算功能的范畴内,将由速度信号在内部预先计算出的车辆定位信息用作针对gps信号的车辆定位的替换信号。因此行驶路线被预先计算,这通过虚线的变化曲线1示出。一旦检测到在变化曲线2中阐明的公路模式定位信息,那么就不会从gps路线数据产生错误的车辆定位,因而这些车辆定位被用于进一步的车辆路线引导。因此又产生了变
化曲线1中的实线。
22.在一定时间的车辆路线引导后,在变化曲线1中再次出现了明显的上升,这是由于变化曲线2中车辆处于越野模式所引起的。因此不能继续使用gps数据。因此又在变化曲线1出现了虚线的变化曲线,其表明,通过计算功能求出或预先计算出用于车辆路线引导的车辆定位。
23.在所述方法的范畴内规定,检测车辆驶过的越野模式行驶路线的长度或持续时间。在达到越野模式驶过的行驶路线的预先确定的阈值5时,禁用车辆定位计算功能,这在变化曲线3中阐明。随着对车辆定位计算功能的禁用,进行车辆定位重置。车辆路线引导可以不再用当前的车辆定位数据来进行,直至车辆再次处于公路模式,变化曲线2表明了这一点。从这个时间点起,再次提供正确的gps路线数据用于车辆路线引导。用于检测越野模式驶过的行驶路线的计数器被复位并且车辆定位计算功能被再次激活。
24.为了按照预先计算出的车辆定位来启动车辆路线引导,监控在车辆定位计算功能禁用时是否存在越野模式定位信息,因而可以通过计算功能的预先计算出的车辆定位来接管车辆路线引导。此外,在所述方法的范畴内监控:是否可以检测公路模式定位信息,因而可以通过gps路线数据来执行车辆路线引导。
25.在图2中示例性地示出了所建议的按本发明的方法的可能的实施方案的流程图。在方法步骤a中在所述方法开始时通过在车辆中设定点火开始启动。
26.在进一步的方法步骤b中检查是否存在越野模式定位信息。如果不存在,那么车辆定位计算功能或预测功能保持激活,这在方法步骤f中阐明。如果存在越野模式定位信息,那么通过计算功能求出车辆定位。在此,在内部将由速度信号得出的车辆定位用作针对由gps路线数据得出的定位的替代信号,这是因为gps路线信号或定位信号不是有效的。这在方法步骤c中阐明。
27.此外,在开始求出车辆定位之后,通过计算功能启动计数器,该计数器检测越野模式驶过的行驶路线。因此在方法步骤d中检查,是否已经达到越野模式驶过的行驶路线的预先确定的阈值。如果没有达到,那么预测或计算功能保持激活。但如果达到,则在下一个方法步骤e中禁用预测或计算功能。
28.附图标记列表
29.1行驶路线的变化曲线
30.2越野模式和公路模式激活的变化曲线
31.3激活和禁用车辆定位计算功能的变化曲线
32.4越野模式驶过的行驶路线的变化曲线
33.5阈值
34.a、b、c、d、e、f方法步骤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
