1.本公开涉及一种用于处理来自感测单元的测量信号的传感器前端以及用于操作传感器设备的方法。
背景技术:
2.传感器一般分为感测单元和传感器前端。这些传感器中的感测单元感测特定的量、例如传感器的位置处的电场或者磁场的幅值,并且将其转换为测量信号。然后,前端处理该测量信号并且产生输出信号、例如表示测量的量的值的数字信号。
3.对于许多应用,传感器的可靠的性能是绝对必要的。这些应用包括使用位置传感器来测量对控制元件的调整的机动车系统。例如,使用位置编码器来测量机动车的方向盘或者操作杆(paddles)的偏转。在这些应用中,传感器的故障、即对测量信号的处理很容易构成严重的安全隐患。因此,可以实施监视传感器功能的错误检测特征。
4.一般来说,传感器在前端包括用于处理测量信号的元件链。传统的具有错误检测功能的传感器对这些元件中的每一个使用专用的监视器,因此产生显著程度的冗余,其导致低效率的错误检测机制和高的能耗。
技术实现要素:
5.本发明要解决的技术问题是,提供一种用于传感器前端的错误检测的改进的设计,其能够确定信号处理是否在不产生错误的情况下可靠地工作。
6.上述技术问题利用独立权利要求的主题来解决。所述改进的设计的实施例和扩展方案是从属权利要求的主题。
7.所述改进的设计基于如下构思,即,借助传感器前端来基于预定的量来产生模拟的(simulated)测量信号,以便模仿由传感器设备的感测单元测量的实际测量值。所述改进的设计还包括:处理模拟的测量信号,以产生模拟的输出信号,并且将模拟的输出信号与预定的量进行比较。基于该比较,可以确定传感器前端的错误状况。例如,如果模拟的输出信号在预定的量的特定范围内,那么确定传感器正常工作。
8.特别是,根据所述改进的设计的传感器前端被配置为用于处理来自感测单元的测量信号。感测单元被配置为用于,从传感器前端的评估单元接收激励信号,通过基于测量参数改变激励信号的幅值,从激励信号产生测量信号,并且将测量信号提供给评估单元。
9.根据所述改进的设计的传感器前端包括评估单元,评估单元被配置为用于,产生激励信号,并且基于激励信号和从感测单元接收到的测量信号产生输出信号。评估单元还被配置为用于,通过基于预定的控制变量控制激励信号的幅值,从激励信号产生模拟的测量信号,基于激励信号和模拟的测量信号产生模拟的输出信号,并且基于模拟的输出信号与预定的控制变量或者从预定的控制变量推导出的信号的比较,来确定错误状况。
10.例如,传感器前端被配置为用于操作感测单元,感测单元通过改变提供给感测单元的激励信号的幅值来产生测量信号。例如,感测单元可以是电感式或者电容式感测单元。
相应地,由前端的评估单元产生的激励信号例如是交变的电信号、例如具有预定的幅值和千赫或者兆赫范围内的频率的正弦信号。由感测单元产生的测量信号在频率方面对应于激励信号,然而,其幅值取决于测量参数的值。例如,对于周期性地变化的测量参数,测量信号对应于具有振荡的包络函数的激励信号。因此,在这种情况下,测量信号可以理解为激励信号的幅值调制版本。
11.传感器前端的评估单元处理从感测单元接收到的测量信号,以产生输出信号。例如,评估单元被配置为用于,将测量信号与激励信号进行比较,并且基于该比较产生输出信号。评估单元可以被配置为用于,利用激励信号对测量信号进行解调,以产生输出信号。
12.为了实现错误检测,评估单元还被配置为用于,基于预定的控制变量,从激励信号产生模拟的测量信号。例如,预定的控制变量对应于模拟的测量参数。换言之,评估单元在不涉及感测单元的情况下模拟来自感测单元的测量响应。与来自感测单元的测量信号类似,模拟的测量信号在频率方面对应于激励信号,然而,其幅值取决于预定的控制变量、即模拟的测量参数的值。
13.评估单元被配置为用于以与来自感测单元的实际测量信号相同的方式处理模拟的测量信号。换言之,评估单元被配置为用于从模拟的测量信号和激励信号产生模拟的输出信号。例如,产生模拟的输出信号包括:使用激励信号对模拟的测量信号进行解调,并且分析所得到的解调信号的幅值。
14.为了确定错误状况,评估单元被配置为用于,将模拟的输出信号与预定的控制变量或者从预定的控制变量推导出的信号进行比较。例如,评估单元被配置为用于,将模拟的输出信号与用来产生模拟的测量信号的模拟的测量参数进行比较。
15.例如,测量参数对应于布置在感测单元附近的对象的位置和/或朝向。例如,测量参数对应于或者是感测单元的位置处的源场、特别是源电场或者源磁场的量。
16.这些实施例中的对象可以通过与位置和/或朝向相关的源场来表征。例如,感测单元的位置处的磁场或者电场强度取决于对象的位置和/或朝向。换言之,对象的位置和/或朝向确定感测单元的位置处的场强。在这种意义上,对象可以发射其自己的源场,或者例如可以经由关于对象的电荷和/或磁化的特定的极性来影响外部的源场。可以借助感测单元、例如借助初级电感器来产生外部的源场。
17.在一些实施例中,测量参数对应于可移动的对象的位置,特别是对应于可旋转的轴的旋转角度。
18.例如,传感器是旋转编码器,并且被配置为用于确定可旋转的对象、例如轴的角度。为此,轴可能影响感测单元的位置处的源场强度,其中,源场的强度取决于旋转角度。替换地,传感器是线性位置编码器,并且被配置为用于确定可移动的对象(例如轴)沿对象的主轴的位移。在这种情况下,感测单元的位置处的源场的幅值取决于位移。
19.在一些实施例中,传感器前端被配置为用于处理来自电感式感测单元的测量信号。
20.这些实施例中的感测单元包括至少一个电感器,电感器基于电感器的位置处的磁场产生测量信号。作为激励信号,例如将正弦激励信号施加到电感器,所得到的测量信号对应于具有改变的幅值的激励信号,该改变的幅值取决于例如电感器的位置处的、受可移动的对象影响的磁场的幅值和/或朝向。例如,这些实施例中的传感器前端被配置为用于,处
理测量信号,并且将其转换为磁场强度的值,如上所述,该值继而对应于所述可移动的对象的朝向和/或位置。
21.在替换的实施例中,传感器前端被配置为用于处理来自电容式感测单元的测量信号。
22.这些实施例中的感测单元包括至少一个电容器,电容器基于电容来产生测量信号,电容例如与电容器的位置处的电场有关。与上面描述的电感器的实施例类似,从电容式感测单元得到的测量信号对应于具有改变的幅值的激励信号,该改变的幅值取决于电容器的位置处的电场的幅值和/或朝向。例如,这些实施例中的传感器前端被配置为用于,处理测量信号,并且将其转换为电场强度的值,如上所述,该值对应于可移动的对象的朝向和/或位置。
23.在一些实施例中,评估单元还被配置为用于,作为一系列输出值来产生输出信号,以传感器前端的时钟速率根据激励信号和测量信号来产生这些输出值中的每一个。
24.在时间增量(time delta)上获取的测量信号可能具有变化的幅值,例如由于周期性地变化的测量参数。可以借助评估单元来处理这种测量信号,以便确定测量参数在所述时间增量上的变化。例如,测量信号是模拟(analog)信号,其频率对应于激励信号的频率并且幅值取决于测量参数。以传感器前端的时钟速率对测量信号进行评估,时钟速率可以具有μs或者ms的数量级。这导致包括多个输出值的输出信号,每个输出值指示相应的评估时间处的测量信号的幅值。换言之,例如,输出信号是测量信号的幅值的数字化版本。可以对这种输出信号进行进一步处理,以确定测量信号的微分(differential)。
25.例如,如果传感器被配置为旋转位置编码器,那么可以借助评估单元处理在时间增量上获取的测量信号,使得输出信号指示可旋转的对象随时间的旋转角度。
26.在另一些实施例中,评估单元还被配置为用于,作为一系列模拟的输出值来产生模拟的输出信号,以传感器前端的时钟速率根据激励信号和模拟的测量信号产生每一个模拟的输出值。
27.例如,为了产生模拟的测量信号,可以通过控制变量的集合来控制激励信号的幅值。在这种意义上,可以产生具有变化的幅值的模拟的测量信号。与上面描述的实施例类似,这些实施例中的评估单元被配置为用于,以与从感测单元接收到的测量信号相同的方式处理在时间增量上取得的模拟的测量信号。特别是,模拟的测量信号是具有与激励信号的频率对应的频率和取决于该控制变量的集合的幅值的模拟信号。例如,产生模拟的测量信号,使其具有借助周期性的控制变量的集合的幅值调制。
28.如上面所描述的,同样以传感器前端的时钟速率对模拟的测量信号进行评估。这导致包括多个模拟的输出值的模拟的输出信号,每一个模拟的输出值指示相应的评估时间的模拟的测量信号的幅值。换言之,例如,模拟的输出信号是模拟的测量信号的幅值的数字化版本。在这些实施例中,评估单元还被配置为用于,基于模拟的输出信号与该控制变量的集合或者从该控制变量的集合推导出的信号的比较,来确定错误状况。
29.评估单元还可以被配置为用于,基于多个模拟的输出值与该控制变量的集合或者从这两个组推导出的信号的比较,来确定另外的错误状况。例如,模拟的测量值构成产生的测量参数的特定的预定的演变(evolution)、例如对象的变化的旋转角度,并且该另外的错误状况评估模拟的输出信号是否反映所述预定的演变。
30.可以对这种模拟的输出信号进行进一步处理,以确定模拟的测量信号的微分。基于该微分,评估单元可以进一步被配置为用于确定另外的错误状况,其例如指示模拟的输出信号的变化是否在由该控制变量的集合的变化定义的范围内。
31.在一些实施例中,评估单元包括用于产生激励信号的振荡器。
32.例如,借助评估单元的振荡电路、例如以其谐振频率工作的lc振荡器产生激励信号,其中,振荡电路能够产生具有预定的幅值和khz或者mhz范围内的频率的正弦振荡。这种高频激励信号使得能够为大多数应用的测量提供足够的分辨率,因为传感器前端的时钟频率一般在khz范围内。
33.在一些实施例中,评估单元包括用于从激励信号产生模拟的测量信号的可变衰减器。
34.基于可以对应于特定程度的衰减的预定的控制变量,可变衰减器可以被配置为用于,通过以确定的方式调整(即衰减)激励信号的幅值来产生模拟的测量信号。对于传感器前端的一些实施例,控制变量的集合可以实现期望的变化的包络函数,以便产生模拟的微分信号。例如借助电容或者电阻梯(ladder)来实现可变衰减器。
35.在一些实施例中,确定错误状况还包括:将模拟的测量信号和预定的控制变量或者从预定的控制变量推导出的信号的偏差,与存储在评估单元的存储器中的预定的阈值进行比较。
36.一般来说,不需要传感器对测量参数进行准确的测量,但是对于大多数应用来说,如果输出值位于实际测量值周围的特定的范围内,那么传感器被视为是准确的。为此,可以借助评估单元将模拟的输出信号与控制变量或者从控制变量推导出的信号之间的偏差与阈值进行比较,以便确定错误状况,即传感器前端的信号处理是否可靠地操作。
37.上述技术问题还通过包括根据上面描述的实施例中的一个的传感器前端的位置传感器来解决。位置传感器被配置为位置编码器、特别是线性或者旋转位置编码器。
38.前面提到的技术问题还通过包括如上所述的位置传感器的机动车的控制元件来解决。
39.这种控制元件包括方向盘、手柄(handlebar)以及机动车的油门和制动踏板。被配置为位置编码器的位置传感器因此可以可靠地确定这种控制元件的位置、朝向和/或位移。在所有这些应用中,借助根据所述改进的设计的传感器前端的实施例来实现对传感器的可靠的错误监视。
40.前面提到的技术问题还通过用于操作传感器设备的方法来解决。所述方法包括:借助评估单元产生激励信号,并且将激励信号提供给感测单元。所述方法还包括:借助感测单元,通过基于测量参数调整激励信号的幅值,来从激励信号产生测量信号,并且将测量信号提供给评估单元。所述方法还包括:借助评估单元,基于激励信号和测量信号,来产生输出信号。
41.根据所述改进的设计的方法还包括:借助评估单元,通过基于预定的控制变量控制激励信号的幅值,来从激励信号产生模拟的测量信号,并且基于激励信号和模拟的测量信号,来产生模拟的输出信号。所述方法还包括:基于模拟的输出信号与预定的控制变量或者从预定的控制变量推导出的信号的比较,来确定错误状况。
42.在所述方法的一些实施例中,产生输出信号和/或模拟的输出信号包括使用激励
信号进行解调。
43.用于操作传感器设备的方法的其它实施例,从上面描述的传感器前端的实施例,对于本领域技术人员变得显而易见。
附图说明
44.下面,借助附图对所述改进的设计进行更详细的描述。具有相同或者相似的功能的元素在所有附图中具有相同的附图标记。因此,在对以下附图的描述中不一定重复对它们的描述。
45.图1示出了根据所述改进的设计的传感器前端的示例性实施例的示意图;
46.图2示出了包括根据所述改进的设计的传感器前端的传感器设备的示例性实施例的示意图;以及
47.图3示出了包括根据所述改进的设计的传感器前端的传感器的应用。
具体实施方式
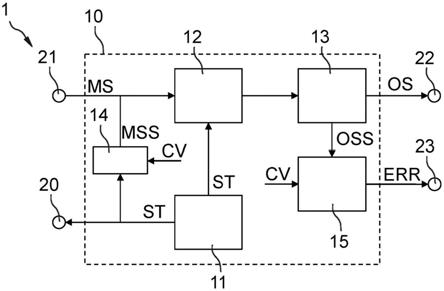
48.图1示出了根据所述改进的设计的用于处理来自感测单元的测量信号ms的传感器前端1的示意图。传感器前端1包括评估单元10,评估单元10被配置为用于,经由传感器前端1的传感器输出端20向感测单元提供激励信号st,并且经由传感器前端1的传感器输入端21从感测单元接收测量信号ms。评估单元10还被配置为用于,经由传感器前端1的输出端22提供输出信号os,并且经由传感器前端1的错误输出端23提供错误状况信号err。
49.评估单元10包括用于产生激励信号st的信号发生器11。例如,信号发生器11是诸如lc振荡器电路的振荡器。激励信号st是通过激励幅值和激励频率表征的正弦信号。例如,激励频率在1khz和100mhz之间的范围内。例如,其具有1mhz的数量级。
50.要由传感器前端1操作的感测单元例如是电感式感测单元,并且包括第一电感器,第一电感器连接到传感器前端1的传感器输出端20,并且被配置为用于,根据法拉第感应定律基于激励信号st来产生变化的磁场。感测单元可以包括第二电感器,第二电感器暴露于变化的磁场中,并且连接到传感器前端1的传感器输入端21。第二电感器被配置为用于,根据感应定律基于来自第一感应器的变化的磁场来产生测量信号ms。
51.测量信号ms对应于激励信号st,然而,基于测量参数(其例如对应于第一电感器和第二电感器之间的距离)在其幅值方面发生了改变、即衰减。换言之,感测单元可以理解为对第一电感器与第二电感器之间的距离敏感的变换器(transformer)。电感器例如是线圈。例如,对于周期性地变化的距离,测量信号ms是具有对应于距离的变化的幅值调制和激励频率的正弦信号。替换地,测量信号ms可以是具有恒定的幅值和频率调制的正弦信号。
52.替换地,电感式感测单元仅包括一个电感器,并且测量信号ms对应于所述电感器中的电流,该电流取决于与金属对象的距离和线圈的接近。在另外的替换方案中,感测单元可以是电容式感测单元。
53.评估单元10还包括解调器12,解调器12被配置为用于,使用激励信号st对测量信号ms进行接收和解调。例如,解调器12被配置为用于对测量信号ms进行幅值或者频率解调。解调信号被提供给处理单元13,处理单元13被配置为用于从解调信号产生输出信号os。例如,处理单元13包括具有增益和/或偏移补偿元件、ad、模拟和数字滤波器以及脉宽调制器
的元件链。例如,输出信号os对应于测量参数的数字化值。例如,输出信号os被提供给传感器前端1的输出端22,用于进一步的信号处理和/或评估。
54.评估单元10还包括可变衰减器14,可变衰减器14被配置为用于基于预定的控制变量cv从激励信号st产生模拟的测量信号mss。例如,可变衰减器14被配置为用于,根据控制变量cv的值,来改变、例如衰减激励信号st的幅值。换言之,模拟的测量信号mss可以理解为由产生的测量参数、即控制变量cv生成的产生的测量信号。例如,控制变量cv是恒定的(因此导致模拟的测量信号mss的恒定的幅值)或者周期性地发生变化(导致幅值调制的模拟的测量信号mss)。例如,可变衰减器14包括电阻和/或电容梯。
55.因为模拟的测量信号mss与测量信号ms具有相同的特性,因此评估单元10可以以相同的方式处理模拟的测量信号mss,以产生模拟的输出信号oss。换言之,评估单元10借助解调器12进行解调,并且借助处理单元13进行进一步处理,以产生模拟的输出信号oss。
56.在所示出的实施例中,模拟的输出信号oss被提供给比较单元15,比较单元15被配置为用于基于模拟的输出信号oss和预定的控制变量cv的比较来确定错误状况。与输出信号os类似,模拟的输出信号oss例如对应于产生的测量参数、即控制变量cv的数字化值。例如,比较单元15被配置为用于确定模拟的输出信号oss是否位于与预定的控制变量cv相关的预定范围或区间内。换言之,比较单元15被配置为用于基于模拟的输出信号oss与预定的控制变量cv之间的偏差来确定错误状况。预定的阈值、范围和/或区间可以与预定变量的值相关并且存储在评估单元10的存储单元中。
57.评估单元10可以被配置为用于,在指定的测量时间内,一次产生输出信号os和/或模拟的输出信号oss,测量时间例如在1ms的数量级。评估单元10还可以被配置为用于,基于测量参数和/或控制变量cv的变化,来产生微分输出信号和/或模拟的微分信号。微分输出信号和/或模拟的微分信号对应于时间增量、例如指定的测量时间内的一系列测量参数和/或控制变量cv。
58.错误状况信号err例如是错误标志,如果模拟的输出信号oss在预定的范围外部,那么错误标志指示错误,否则不指示错误。在其它实施例中,可以将模拟的输出信号oss和预定的控制变量cv两者提供给外部错误单元,以确定错误状况。为了测试确定错误状况时的可靠性,评估单元10可以被配置为用于,例如经由将模拟的输出信号oss与如下的控制变量cv进行比较,来故意制造错误状况,该控制变量cv不同于借助可变衰减器14用来产生模拟的测量信号mss的控制变量。
59.图2示出了包括根据所述改进的设计的传感器前端1和由传感器前端1操作的感测单元2的传感器设备的示意图。
60.例如,所示出的传感器设备是位置传感器、例如位置编码器。感测单元2包括初级电感器2a和多个次级电感器2b。如上所述,初级电感器2a连接到传感器输出端20,用于根据感应定律基于激励信号st产生磁场。次级电感器2b相对于初级电感器2a布置在不同的位置,从而每个次级电感器2b检测其位置处的磁场,并且基于所述检测到的磁场借助感应产生测量信号。
61.次级电感器2b的位置处的磁场可以取决于金属对象3在次级电感器2b附近的布置。例如,金属对象3例如是相对于其横截面具有非均匀磁化的可旋转的轴。旋转能力由图2中的箭头指示。金属对象3的旋转因此使次级电感器2b的位置处的磁场改变,从而所产生的
测量信号可以是金属对象3的朝向、例如旋转角度的指示。由于在本实施例中感测单元被配置为用于确定金属对象3的旋转角度,因此位置传感器可以理解为旋转位置编码器。
62.为了使传感器前端1的评估单元10能够处理来自每个次级电感器2b、即来自每个传感器输入通道的测量信号ms,本实施例中的评估单元10还包括开关单元16,开关单元16用于选择来自传感器输入端21中的相应的一个的测量信号ms。开关单元16可以包括用于每个传感器输入通道的电子部件17,其例如包括解调器、滤波器和/或模数转换器。所示出的实施例中的开关单元16还被配置为用于,如果要对传感器前端的功能和/或性能进行验证,那么单独或者同时选择来自可变衰减器14的模拟的测量信号mss作为所有通道的输入信号。传感器前端和10可以被配置为用于,针对来自次级电感器2b的测量信号ms中的每一个产生输出信号os。替换地,评估单元10、特别是处理单元13可以被配置为用于从测量信号ms产生单个输出信号os。借助具有围绕可旋转对象对称布置的次级电感器2b的旋转编码器来确定金属轴的旋转角度,对于本领域技术人员来说是公知的设计,因此在此不进行进一步的讨论。
63.作为所示出的旋转编码器的替换,感测单元2可以被配置为线性位置编码器。此外,代替电感器,感测单元可以包括电容器,以实现电容式感测单元,例如用于检测电场的变化。
64.根据所示出的实施例中的一个的传感器前端1可以方便地在需要进行错误监视来验证正确处理的测量信号的输出的传感器设备中使用。可能的应用包括线性和旋转位置编码器,其例如在机动车中使用,用于检测控制元件的朝向和/或偏转。
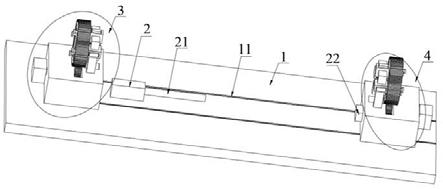
65.在图3中示出了包括根据所述改进的设计的传感器前端1的传感器设备的具体应用,其中,传感器设备的感测单元2被设计为旋转编码器,并且被配置为用于监视例如连接到机动车的方向盘或者手柄的轴3的旋转角度。在所示出的示例性实施例中,传感器前端1和感测单元2布置在公共的基板4上,公共的基板4可以是电路板。
66.其它应用包括例如经由被设计为线性编码器的传感器设备来监视加速踏板和制动踏板的偏转。
67.如在本公开全文中所描述的,借助产生模拟的测量信号并且监视其正确处理而实现的错误监视,可以以预先定义的速率来触发,例如在处理来自感测单元的实际测量值之后触发一次,或者在一定数量的实际测量之后定期触发。
68.在附图中示出的传感器前端1的实施例表示示例性的实施例,因此它们不构成根据所述改进的设计的所有实施例的完整列表。例如,实际的调谐布置可以在附加的部件和配置方面与所示出的实施例不同。
69.附图标记
[0070]1ꢀꢀꢀꢀꢀꢀꢀꢀ
传感器前端
[0071]2ꢀꢀꢀꢀꢀꢀꢀꢀ
感测单元
[0072]
2a
ꢀꢀꢀꢀꢀꢀꢀ
初级电感器
[0073]
2b
ꢀꢀꢀꢀꢀꢀꢀ
次级电感器
[0074]3ꢀꢀꢀꢀꢀꢀꢀꢀ
可移动的对象
[0075]
10
ꢀꢀꢀꢀꢀꢀꢀ
评估单元
[0076]
11
ꢀꢀꢀꢀꢀꢀꢀ
信号发生器
[0077]
12
ꢀꢀꢀꢀꢀꢀꢀ
解调器
[0078]
13
ꢀꢀꢀꢀꢀꢀꢀ
处理单元
[0079]
14
ꢀꢀꢀꢀꢀꢀꢀ
可变衰减器
[0080]
15
ꢀꢀꢀꢀꢀꢀꢀ
比较单元
[0081]
16
ꢀꢀꢀꢀꢀꢀꢀ
开关单元
[0082]
17
ꢀꢀꢀꢀꢀꢀꢀ
电子部件
[0083]
20
ꢀꢀꢀꢀꢀꢀꢀ
传感器输出端
[0084]
21
ꢀꢀꢀꢀꢀꢀꢀ
传感器输入端
[0085]
22
ꢀꢀꢀꢀꢀꢀꢀ
输出端
[0086]
23
ꢀꢀꢀꢀꢀꢀꢀ
错误输出端
[0087]
cv
ꢀꢀꢀꢀꢀꢀꢀ
控制变量
[0088]
err
ꢀꢀꢀꢀꢀꢀ
错误信号
[0089]
ms
ꢀꢀꢀꢀꢀꢀꢀ
测量信号
[0090]
mss
ꢀꢀꢀꢀꢀꢀ
模拟的测量信号
[0091]
os
ꢀꢀꢀꢀꢀꢀꢀ
输出信号
[0092]
oss
ꢀꢀꢀꢀꢀꢀ
模拟的输出信号
[0093]
st
ꢀꢀꢀꢀꢀꢀꢀ
激励信号。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。