1.本实用新型属于管道清理设备技术领域,具体涉及一种用于地下管道清理自平衡自适应机器人的可变向给进机构。
背景技术:
2.地下管线复杂多变,管道类型繁杂。不同区域、不同用途的管道,其布设方式和布设密度的差异性很大,致使管线中可能会频繁出现弯曲管段。同时,经长期使用,管道环境会持续恶化。这些都会给管道清理工作带来困难。
3.对于目前的地下管道清理机器人,就其管道内变向方式和给进方式而言,蠕动式管道机器人的分节之间柔性连接,对弯曲管道适应性强。但其不足之处在于分节多、结构复杂、运动速度低、消耗能量大等。螺旋式管道机器人能在管道内螺旋回转,从而使管道机器人与管道内壁之间的产生较大的摩擦力,从而推动机器人在管道内给进行走。但其不足之处在于其驱动效率不高,产生的给进力较小,机动性较差等。因此,传统管道机器人在管内变向方式和给进方式方面均存在一定的局限性,只能针对某一类地下管道进行清理,普适性较差。面对日益复杂的地下管道清理工作,急需在管道机器人管内变向方式和给进方式方面有所创新。
4.为解决上述问题,设计一种用于地下管道清理自平衡自适应机器人的可变向给进机构。旨在实现管道内转弯动作。在清理障碍物时,可带动修复机构整体旋转,同时为修复机构提供持续稳定的给进力,加大单次管道清理的范围,提升清理效率。
技术实现要素:
5.本实用新型提出了一种用于地下管道清理自平衡自适应机器人的可变向给进机构。其具体结构形式和连接方式如下所述:
6.用于地下管道清理自平衡自适应机器人的可变向给进机构包括变向机构和给进机构;
7.变向机构包括转动底座,转动底座上设置有能供传动轴穿过的圆孔,转弯电机对称分布在转动底座上,两个十字联轴器首端均与转弯电机输出轴固定连接,传动轴通过轴承与转动底座转动连接且传动轴两端分别与十字联轴器固连,转动接头与传动轴固定连接;
8.给进机构与转动接头固连,给进机构能做伸缩往复运动,用于带动机器人工作部工作。
9.更进一步而言,所述的给进机构包括给进端盖,给进端盖与变向机构的转动接头固连,给进端盖与给进底座固连,第二齿轮设置在由给进端盖与给进底座构成的空腔内,给进电机固连在给进底座上且给进电机输出轴穿过给进底座的圆孔后与第二齿轮固连,梯形丝杠首端穿过给进底座圆形孔位后与第二齿轮啮合连接,梯形丝杠末端与丝杠导向块固定连接,给进电机驱动第二齿轮进而带动梯形丝杠转动,丝杠螺母与梯形丝杠螺纹连接,套筒
与丝杠螺母固定连接,丝杠导向块与套筒同轴心配合,且丝杠导向块能在套筒内转动。
10.更进一步而言,所述的给进机构还包括推杆外筒,推杆外筒与给进底座固连,伸缩杆导向块与推杆外筒由固连,给进底座、丝杠螺母、伸缩杆导向块三个部件上均加工有能安装导轨的凹槽,导轨两端分别连接在给进底座和伸缩杆导向块的凹槽内,导轨中部与丝杠螺母上的凹槽连接,保证丝杠螺母在梯形丝杠的驱动下,只会沿着导轨方向移动,而不会发生转动。
11.本实用新型的有益效果:
12.变向机构的设计使得该机器人整体呈分体链节结构,机体柔性增加,可以实现管道内360
°
环向转动。同时,也可实现180
°
摆动,其摆动平面与环向转动平面垂直并且经过环向转动平面中心。上述两种变向运动相结合,可以实现管道中转弯动作,对弯曲管道具有很好的适应性;给进机构的设计可以为机器人在进行管道清理时提供给进力,使得机器人可以持续地保持稳定的工作状态。同时,给进机构加大了机器人单次清理的范围,提高了清理效率。综合来说,可变向给进机构可以使得该机器人对弯管清理具有很好的适应性,并且其清理效率稳定且持续。
附图说明
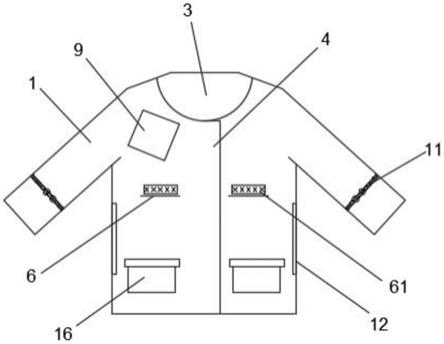
13.图1为本实用新型连接在机器人上的结构示意图。
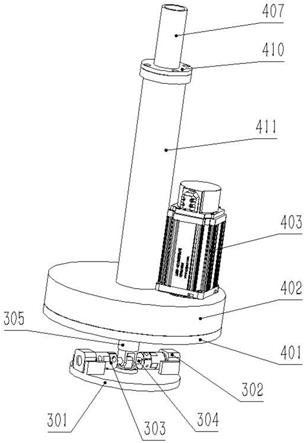
14.图2为本实用新型整体结构示意图。
15.图3为本实用新型变向机构的立体示意图。
16.图4为本实用新型的给进机构的立体示意图。
17.图5为推杆外筒未连接在给进机构的立体示意图。
18.图6为本实用新型的给进机构的剖面图。
具体实施方式
19.请查阅图1至图6,用于地下管道清理自平衡自适应机器人的可变向给进机构,包括变向机构3和给进机构4;
20.变向机构3包括转动底座301、两个转弯电机302、两个十字联轴器303、传动轴304和转动接头305;
21.转动底座301与行走机构1中的电机驱动轴111固定连接,转动底座301上设置有可供传动轴304穿过的圆孔,转弯电机302对称分布在转动底座301上,两个十字联轴器303首端均与转弯电机302输出轴固定连接,传动轴304通过轴承与转动底座301转动连接且传动轴304两端分别与十字联轴器303固连,传动轴304可在两侧转弯电机302的共同驱动下进行转动,转动接头305与传动轴304固定连接,且两者为同轴心的配合关系;传动轴304转动可以带动转动接头305进行转动;
22.给进机构4包括给进端盖401、给进底座402、给进电机403、第二齿轮404、梯形丝杠405、丝杠螺母406、套筒407、丝杠导向块408、导轨409、伸缩杆导向块410、推杆外筒411;
23.给进端盖401与变向机构3的转动接头305通过螺纹固定连接,给进端盖401与给进底座402由螺钉固定连接,第二齿轮404设置在由给进端盖401与给进底座402构成的空腔内,给进底座402上设置有可以穿过梯形丝杠405和给进电机403输出轴的圆孔,给进电机
403固定连接在给进底座402上且给进电机403输出轴穿过给进底座402的圆孔后与第二齿轮404固定连接,给进电机403可以驱动第二齿轮404转动,梯形丝杠405首端穿过给进底座402圆形孔位,与第二齿轮404啮合连接,梯形丝杠405末端与丝杠导向块408固定连接,给进电机403驱动齿轮进而带动梯形丝杠405转动,丝杠螺母406与梯形丝杠405螺纹连接,套筒407与丝杠螺母406固定连接,丝杠导向块408与套筒407同轴心配合,且丝杠导向块408可在套筒407内转动,推杆外筒411与给进底座402螺纹固定连接,伸缩杆导向块410与推杆外筒411由螺钉固定连接,给进底座402、丝杠螺母406、伸缩杆导向块410三个部件上均加工有可以安装导轨409的凹槽,导轨409两端分别连接在给进底座402和伸缩杆导向块410的凹槽内,导轨409中部与丝杠螺母406上的凹槽连接,保证丝杠螺母406在梯形丝杠405的驱动下,只会沿着导轨409方向移动,而不会发生转动。
24.变向方式
25.变向机构3中的转动底座301与行走机构1中的电机驱动轴111固定连接,电机驱动轴111与旋转驱动电机110固定连接,基于上述各机构的连接关系,旋转驱动电机110将驱动变向机构3、给进机构4、修复机体5、磨削机构和切削机构7在同一圆周平面上进行360
°
旋转;同时转弯电机302将驱动给进机构4、修复机体5、磨削机构和切削机构7在同一圆周平面上进行180
°
摆动;上述两种运动方式结合,可实现该装置在管道内的转弯动作。
26.给进方式
27.给进机构4中的梯形丝杠405在给进电机403的驱动下转动,进而带动丝杠螺母406和套筒407进行移动,基于上述各机构的连接关系,修复机体5、磨削机构和切削机构7将在套筒407的推动下向前或者向后运动。
28.该城市地下管道清理自平衡自适应机器人在工作时,首先行走机构1带动变径机构移动至指定位置,行走机构1的旋转驱动电机通过电机驱动轴带动变向机构3转动,进而带动给进机构4、修复机体5、磨削机构和切削机构7进行360
°
的转动,此时给进机构4的套筒407伸出,带动修复机体5、磨削机构和切削机构7向前移动,修复机体5、磨削机构6和切削机构7在工作时是旋转运动和直线位移运动同时进行的,待套筒407伸出到位后,行走机构1的旋转驱动电机不再带动变向机构3转动,此时套筒407收缩,套筒407收缩到位后,变径单元2的车轮驱动电机带动行走轮在管壁内移动一定距离,再次重复上述步骤。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。