技术特征:
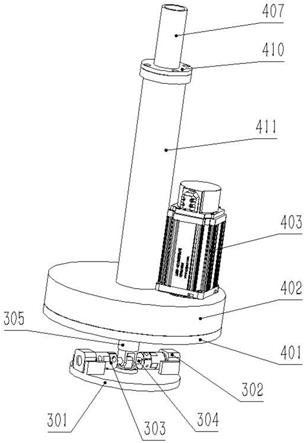
1.用于地下管道清理自平衡自适应机器人的可变向给进机构,其特征在于:包括变向机构(3)和给进机构(4);变向机构(3)包括转动底座(301),转动底座(301)上设置有能供传动轴(304)穿过的圆孔,转弯电机(302)对称分布在转动底座(301)上,两个十字联轴器(303)首端均与转弯电机(302)输出轴固定连接,传动轴(304)通过轴承与转动底座(301)转动连接且传动轴(304)两端分别与十字联轴器(303)固连,转动接头(305)与传动轴(304)固定连接;给进机构(4)与转动接头(305)固连,给进机构(4)能做伸缩往复运动,用于带动机器人工作部工作。2.根据权利要求1所述的用于地下管道清理自平衡自适应机器人的可变向给进机构,其特征在于:所述的给进机构(4)包括给进端盖(401),给进端盖(401)与变向机构(3)的转动接头(305)固连,给进端盖(401)与给进底座(402)固连,第二齿轮(404)设置在由给进端盖(401)与给进底座(402)构成的空腔内,给进电机(403)固连在给进底座(402)上且给进电机(403)输出轴穿过给进底座(402)的圆孔后与第二齿轮(404)固连,梯形丝杠(405)首端穿过给进底座(402)圆形孔位后与第二齿轮(404)啮合连接,梯形丝杠(405)末端与丝杠导向块(408)固定连接,给进电机(403)驱动第二齿轮(404)进而带动梯形丝杠(405)转动,丝杠螺母(406)与梯形丝杠(405)螺纹连接,套筒(407)与丝杠螺母(406)固定连接,丝杠导向块(408)与套筒(407)同轴心配合,且丝杠导向块(408)能在套筒(407)内转动。3.根据权利要求1所述的用于地下管道清理自平衡自适应机器人的可变向给进机构,其特征在于:所述的给进机构(4)还包括推杆外筒(411),推杆外筒(411)与给进底座(402)固连,伸缩杆导向块(410)与推杆外筒(411)由固连,给进底座(402)、丝杠螺母(406)、伸缩杆导向块(410)三个部件上均加工有能安装导轨(409)的凹槽,导轨(409)两端分别连接在给进底座(402)和伸缩杆导向块(410)的凹槽内,导轨(409)中部与丝杠螺母(406)上的凹槽连接,保证丝杠螺母(406)在梯形丝杠(405)的驱动下,只会沿着导轨(409)方向移动,而不会发生转动。
技术总结
用于地下管道清理自平衡自适应机器人的可变向给进机构包括变向机构和给进机构;变向机构包括转动底座,转动底座上设置有能供传动轴穿过的圆孔,转弯电机对称分布在转动底座上,两个十字联轴器首端均与转弯电机输出轴固定连接,传动轴通过轴承与转动底座转动连接且传动轴两端分别与十字联轴器固连,转动接头与传动轴固定连接;给进机构与转动接头固连,给进机构能做伸缩往复运动,用于带动机器人工作部工作。部工作。部工作。
技术研发人员:高科 闻育民 赵研 谢晓波 姜雯
受保护的技术使用者:吉林大学
技术研发日:2022.01.12
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。