1.本实用新型涉及打捆机技术领域,尤其涉及一种秸秆打捆机。
背景技术:
2.现有的打捆机在秸秆成型后,往往需要人工进行捆扎,不仅捆扎的效率低,还增加了工作人员的劳动强度,而部分打捆机能在秸秆成型后自动用塑料膜将柱形秸秆块包裹打捆,虽然提高了捆扎效率,但塑料膜的使用成本较高,降解周期长,当秸秆内水分较多时,很难通过塑料膜向外蒸发,导致秸秆块的腐烂速度大幅度提高,为此,我们提出一种秸秆打捆机。
技术实现要素:
3.本实用新型的目的是为了解决现有技术中打捆机的捆扎效率低,捆扎成本较高,当秸秆未完全干燥时,其内部的水分很难通过塑料膜向外蒸发,导致秸秆块的腐烂速度大幅度提高的问题,而提出的一种秸秆打捆机。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.一种秸秆打捆机,包括壳体和开设在壳体上的进料口,所述壳体内固定安装有箱体和控制器,所述箱体内绕卷有捆绳,且捆绳的一端延伸至箱体外,所述壳体的内侧壁上固定安装有下置电机和上置电机,所述上置电机的输出端固定连接有上丝杠,所述下置电机的输出端固定连接有下丝杠,所述上丝杠与下丝杠的另一端与壳体的内侧壁之间均设置有轴承,所述壳体内还设有夹持机构。
6.进一步,所述上丝杠通过第一螺母座配合连接有上机械爪,所述下丝杠通过第二螺母座配合连接有下机械爪,所述上机械爪与下机械爪均为微型电动夹爪。
7.进一步,所述下置电机、上置电机均与控制器电性连接,所述下置电机与上置电机的外侧共同设置有防尘罩。
8.进一步,所述夹持机构包括对称安装在壳体内的两个驱动电机,两个所述驱动电机均与控制器电性连接,两个所述驱动电机的输出端固定连接有水平丝杠,两个所述水平丝杠上配合安装有滑动座,两个所述滑动座固定支撑有气缸,两个所述气缸的输出端均固定连接有夹板。
9.进一步,所述壳体内固定安装有支架,所述支架通过限定角度转轴支撑有弧形放置板,且弧形放置板位于进料口的下方。
10.进一步,两个所述夹板对称分布在弧形放置板的两侧,且两个夹板均不与上机械爪、下机械爪相接触,所述壳体上设有操作窗,所述操作窗的位置与箱体的位置相对应。
11.本实用新型能自动对成型后的柱形秸秆块进行捆扎,捆扎速度快,提高了打捆机的工作效率,并且捆扎时捆绳会交叉分布,使得柱形秸秆块受力均匀,不容易出现局部松散等问题,对柱形秸秆块的固定的效果更好,捆扎完成后,柱形秸秆块内部的水分仍然能向外蒸发,降低了秸秆腐烂速度,方便运输。
附图说明
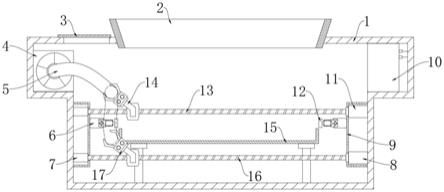
12.图1为本实用新型提出的一种秸秆打捆机的结构示意图;
13.图2为本实用新型提出的一种秸秆打捆机中夹持机构的俯视图。
14.图中:1壳体、2进料口、3操作窗、4箱体、5捆绳、6驱动电机、7轴承、8下置电机、9防尘罩、10控制器、11上置电机、12夹板、13上丝杠、14上机械爪、15弧形放置板、16下丝杠、17下机械爪、18水平丝杠、19滑动座、20气缸。
具体实施方式
15.参照图1-2,一种秸秆打捆机,包括壳体1和开设在壳体1上的进料口2,壳体1内固定安装有箱体4和控制器10,箱体4内绕卷有捆绳5,且捆绳5的一端延伸至箱体4外,壳体1的内侧壁上固定安装有下置电机8和上置电机11,上置电机11的输出端固定连接有上丝杠13,下置电机8的输出端固定连接有下丝杠16,上丝杠13与下丝杠16的另一端与壳体1的内侧壁之间均设置有轴承7,壳体1内还设有夹持机构。
16.上丝杠13通过第一螺母座配合连接有上机械爪14,下丝杠16通过第二螺母座配合连接有下机械爪17,上机械爪14与下机械爪17均为微型电动夹爪,能自动夹紧或张开。
17.下置电机8、上置电机11均与控制器10电性连接,下置电机8与上置电机11的外侧共同设置有防尘罩9,防尘罩9能避免秸秆打捆机工作时产生的大量碎粒或灰尘贴附下置电机8或上置电机11表面上,影响下置电机8或上置电机11的散热。
18.夹持机构包括对称安装在壳体1内的两个驱动电机6,驱动电机6的外侧也可增加常规防尘部件,两个驱动电机6均与控制器10电性连接,两个驱动电机6的输出端固定连接有水平丝杠18,两个水平丝杠18上配合安装有滑动座19,两个滑动座19固定支撑有气缸20,两个气缸20的输出端均固定连接有夹板12;
19.驱动电机6、下置电机8以及上置电机11均为正反转电机,控制器10可以通过柔性导线与驱动电机6、下置电机8、上置电机11、气缸20连接,也可以通过蓝牙传输模块与上述装置电连接,以避免柔性导线缠绕或柔性导线的绝缘层破损的问题,蓝牙信号传输功能为现有技术,在此不做赘述。
20.壳体1内固定安装有支架,支架通过限定角度转轴支撑有弧形放置板15,且弧形放置板15位于进料口2的下方。
21.两个夹板12对称分布在弧形放置板15的两侧,且两个夹板12均不与上机械爪14、下机械爪17相接触,设置限定角度转轴的目的是使秸秆在成型后,两个夹板12可以将柱形的秸秆夹住并向上丝杠13以及下丝杠16的方向移动,在此过程中,弧形放置板15不会对柱形的秸秆产生很大的阻力,而在秸秆打捆机正常工作时,限定角度转轴也不会影响弧形放置板15收集秸秆的效率,需要说明地是,常规打捆机中的皮带、压辊、滚轮、定位柱、连杆等部件均为现有技术,且不属于本设备的创新点,因此未在附图中示出上述常规部件;
22.壳体1上设有操作窗3,操作窗3的位置与箱体4的位置相对应,操作员可通过操作窗3拉出捆绳5,使上机械爪14和下机械爪17能牢固的夹住适当长度的捆绳5。
23.本设备在使用时,先通过操作窗3将捆绳5向外拉出一定长度(操作窗3的位置根据实际使用情况进行设置),此时,上机械爪14与下机械爪17的位置如图1所示,上机械爪14夹紧捆绳5的上端,使捆绳5自然垂落,再控制下机械爪17夹紧捆绳5的下端,一定长度的捆绳5
会自然垂落在上机械爪14与下机械爪17之间;
24.关闭操作窗3,秸秆打捆机开始工作,秸秆通过进料口2进入壳体1内并在弧形放置板15上逐渐成型,当柱形秸秆块的直径达到一定值后,秸秆打捆机暂停向进料口2处投放秸秆;
25.此时气缸20开启,使得两块夹板12牢牢夹持柱形秸秆块,与此同时,驱动电机6开启,使得水平丝杠18驱动滑动座19向上丝杠13、下丝杠16的方向运动;
26.当柱形秸秆块部分脱离弧形放置板15后,柱形秸秆块的一侧会与捆绳5相抵,两个气缸20分别驱动两块夹板12相互远离,使得柱形秸秆块与夹板12之间具有一定的间隙;
27.此时,在秸秆打捆机内滚轮(滚轮为秸秆打捆机的常规部件,未图示)的转动下,柱形秸秆块仍然会进行转动,上置电机11与下置电机8同时开启,上机械爪14与下机械爪17同时向右运动,因为柱形秸秆块与捆绳5之间具有较大的摩擦力,所以在上机械爪14带动捆绳5向右运动时,箱体4内的捆绳5会释放并绕卷在柱形秸秆块外侧;
28.当上机械爪14与下机械爪17运动到最右端位置后,下置电机8反转,使得垂落在上机械爪14与下机械爪17之间的捆绳5自动绕卷在柱形秸秆块的外侧,形成交叉的网状捆绑,不仅捆扎速度快,而且捆绳5分布均匀,固定效果好。
29.需要说明地是,垂落在上机械爪14与下机械爪17之间的捆绳5与箱体4与上机械爪14之间的一段捆绳5之间具有一定的距离,以免在第一次绕卷时将此段捆绳5也捆扎进去;
30.捆扎结束后,将捆绳5剪断并打结,控制夹持机构、上机械爪14、下机械爪17复位,以便于进行下一次的打捆操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
