1.本发明涉及一种用于自动存储和取回系统的气体隔离的设施和方法。
背景技术:
2.图1a公开了具有框架结构100的典型现有技术自动存储和取回系统1。
3.框架结构100包括多个直立构件102和可选地多个支撑直立构件102的水平构件103。构件102、103通常可由金属制成,例如挤压铝型材。
4.框架结构100限定了存储网格104,该存储网格104包括以行布置的存储列105,其中存储列105存储容器106(也称为箱)互相堆叠在另一个之上以形成堆107。
5.每个存储容器106通常可以容纳多个产品项目(未示出),并且存储容器106内的产品项目可以是相同的,或者可以是不同的产品类型,这取决于应用。
6.存储网格104防止堆107中存储容器106的水平运动,并引导存储容器106的竖直运动,但是在堆叠时通常不以其他方式支撑存储容器106。
7.自动存储和取回系统1包括在存储网格104的顶部上以网格图案布置的轨道系统108,在该轨道系统108上操作多个容器搬运车辆200(如图1c中例示),以从存储列105升起存储容器106和将存储容器106下降到存储列105中,并且也将存储容器106运输到存储列105上方。构成网格图案的网格单元122中的一个的水平范围在图1a中由粗线标记。
8.轨道系统108包括第一组平行轨道110,其被布置为引导容器搬运车辆200沿第一方向x穿过框架结构100的顶部运动;以及垂直于第一组平行轨道110布置的第二组平行轨道111,以引导容器搬运车辆200在垂直于第一方向x的第二方向y上运动。以这种方式,轨道系统108定义了网格列,在其上方容器搬运车辆201、301可以在存储列105的上方横向移动,即在平行于水平x-y平面的平面内移动。
9.轨道系统108可以是单轨道系统或双轨道系统,如图1b所示。后一轨道结构允许具有大致对应于由网格单元122在x和y方向中的至少一个方向上定义的横向区域的足迹的容器搬运车辆200沿着一排网格列行进,即使另一容器搬运车辆200位于邻近该行的网格单元上方。单轨和双轨系统两者,或者包括单轨系统108中的单轨和双轨布置的组合,在水平面p中形成包括多个矩形并且均匀的网格位置或网格单元122的网格图案,其中,每个网格单元122包括网格开口115,该网格开口115由第一组平行轨道110的一对相邻轨道110a、110b和第二组平行轨道111的一对相邻轨道111a、111b界定。
10.因此,轨道110a和110b形成限定沿x方向运行的平行网格单元行的轨道对,轨道111a和111b形成限定沿y方向运行的平行网格单元行的轨道对。
11.如图1b所示,每个网格单元122(由虚线框指示)具有宽度wc,其通常在30至150厘米的间隔内,以及长度lc,其通常在50至200厘米的间隔内。每个网格开口115具有宽度wo,其通常比网格单元122的宽度wc小2到10厘米。每个网格开口115具有长度lo,其通常比网格单元122的长度lc小2到10厘米。
12.图1c公开了操作图1a中公开的系统1的现有技术容器搬运车辆200。每个现有技术
容器搬运车辆200包括车身202和八个车轮的车轮布置201,其中第一组四个车轮使容器搬运车辆200能够在x方向上横向移动,并且第二组其余四个车轮使容器搬运车辆150能够在y方向上横向移动。车轮布置201中的一组或两组车轮可被升高和降低,使得第一组车轮和/或第二组车轮可在任何一次与相应的一组轨道110、111接合。
13.每个现有技术的容器搬运车辆200还包括用于竖直运输存储容器106的提升装置203,例如从存储列105中升高存储容器106和将存储容器106降低到存储列105中。提升装置203可以包括一个或多个夹持/接合装置,其适于接合存储容器106,并且该夹持/接合装置可从车辆200放下,这样就可在与第一方向x和第二方向y正交的第三方向z上调整夹持/接合装置相对于车辆的位置。
14.常规地,并且也出于本技术的目的,z=1表示网格104的最上层,即紧接轨道系统108下面的层,z=2表示轨道系统108下面的第二层,z=3表示第三层等。在图1a中公开的示例性现有技术网格104中,z=8表示网格104的最下层。因此,作为示例,并使用图1a中指示的笛卡尔坐标系x,y,z,在图1a中标识为106'的存储容器可以说占据网格位置或单元x=10,y=2,z=3。可以说,容器搬运车辆200在层z=0中行驶,并且每个网格列可以通过其x和y坐标来识别。
15.每个容器搬运车辆200都包括存储室或空间(未示出),当在轨道系统108上运输存储容器106时,该存储室或空间用于容纳和存放存储容器106。
16.容器搬运车辆200可以具有悬臂结构,如在n0317366中所描述的,其内容也通过引用并入本文。
17.可替代地,容器搬运车辆可具有占地面积,即在x和y方向上的范围,其通常等于网格单元122的横向范围,即网格单元122在x和y方向上的范围,例如在wo2015/193278a1中所描述的,其内容通过引用并入本文。
18.这里使用的术语“横向”可以指“水平”。
19.在x和y方向上,相邻的网格单元彼此接触布置,使得它们之间没有空间。
20.在存储网格104中,大多数网格列是存储列105,即在其中将存储容器106存储在堆107中的网格列105。但是,网格104通常具有至少一个不用于存储存储容器106的网格列,但是其包括容器搬运车辆200可卸下和/或接取存储容器106的位置,以便可将它们运输到可从网格104的外部访问存储容器106或将其从网格104移除或移进网格104的第二位置(未示出)。在本领域内,这样的位置通常称为“端口”,并且端口位于其中的网格列可称为“交付列”119、120。容器搬运车辆200分别交付和接收容器106的卸货和取货端口被称为“交付列的上端口”119、120,而交付列的另一端被称为“交付列的下端口”。
21.图1a中的存储网格104包括两个交付列119和120。例如,第一交付列119可以包括专用的卸货端口,其中容器搬运车辆200可以卸下要运输通过交付列119运输并且进一步运输到访问站或转运站的存储容器106,并且第二交付列200可以包括专用的取货端口,其中容器搬运车辆200可以从访问站或转运站拾取已经运输通过交付列200的存储容器106。第一和第二交付列119、120的每个端口可以包括适用于拾取和放下存储容器106的端口。
22.第二位置通常可以是从存储容器106中取出产品或将产品放置到存储容器6中的拾取站或存储站。在拾取站或存储站中,存储容器106通常从不从自动存储和取回系统1中移除,而是一旦被访问就返回到存储网格104中。为了将存储容器移出或移入存储网格104
中,还在交付列中设置有下端口,这样的下端口例如用于将存储容器106转移到另一存储设施(例如,到另一存储网格)、直接到运输车辆(例如,火车或卡车)或到生产设施。
23.传送系统也可被布置成在不同存储网格之间传送存储容器,例如,如wo 2014/075937a1中所述,其内容通过引用并入本文。
24.当要访问存储在图1a中公开的存储网格104中的存储容器106时,将指示其中一个容器搬运车辆200从目标存储容器106在网格104中的位置取回目标存储容器106并将其运输到或通过交付列119。此操作涉及将容器搬运车辆200移动到目标存储容器106所在的存储列105上方的网格位置,使用容器搬运车辆的提升装置203从存储列105取回存储容器106,并将存储容器106运送到第一交付列119。如果目标存储容器106位于堆107的深处,即一个或多个其他存储容器位于目标存储容器106上方,该操作还涉及在从存储列105中提升目标存储容器106之前临时移动放置在上方的存储容器。该步骤在本领域中有时被称为“挖掘”,该步骤可用随后用于将目标存储容器106运输到交付列119的同一容器搬运车辆200,或者通过一个或多个其他合作的容器搬运车辆200来执行。替代地或另外地,自动存储和取回系统1可具有专门用于临时从存储列105移除存储容器106的任务的容器搬运车辆。一旦目标存储容器106已经从存储列105中移除,可将临时移除的存储容器重新放置到原始存储列105中。然而,移除的存储容器可替代地重定位到其他存储列105。
25.当将存储容器106存储在网格104中时,指示容器搬运车辆200之一从第二交付列120接取存储容器106并将其运输到它要被存储的存储列105上方的网格位置。在移除位于存储列堆107内的目标位置处或目标位置之上的任何存储容器之后,容器搬运车辆200将存储容器106定位在期望位置。然后,可将移除的存储容器降低回存储列105中,或重新放置到其他存储列105中。
26.为了监测和控制自动存储和取回系统1,以便在所需时间将所需存储容器106交付到所需位置,而不会使容器搬运车辆200相互碰撞,自动存储和取回系统1包括控制系统109,该控制系统通常是计算机化的,并且包括数据库,用于监测和控制例如各个存储容器106在存储网格104内的位置、每个存储容器106的内容以及容器搬运车辆200的移动。
27.上述类型的存储系统与诸如端口和充电站(用于给容器搬运车辆200充电)的其他装置一起安装在存储设施中。与存储系统的操作相关联的其他区域,例如维护区域和控制室,通常向轨道系统开放,容器搬运车辆200和充电站在轨道系统上操作。
28.一些最新的存储系统,如autostore as公司开发的自动存储和取回系统,在轨道系统和所述其他区域之间配备有可移动的物理屏障,可以在需要时升高和降低。
29.然而,如果存储系统内发生火灾,则火灾很有可能蔓延到设施的其他部分,例如工人正在工作的区域。可移动的物理屏障,如在autostore as的存储系统中发现的那些,可以在一定程度上减缓火灾的蔓延。但这些措施无法将火灾发生和/或蔓延的风险降至零或接近零。
30.一些现有技术的系统,例如autostore as的存储系统,包括通过一组传感器和灭火器来检测和灭火的措施。
31.与大多数已知的自动存储和取回系统相关联的一个问题是,它们没有防止火灾发生的手段,只有扑灭现有火灾的手段。在商业存储设施内很难避免任何易燃材料。
32.一场火灾至少需要有三个元素:热、燃料和氧气。热通常以高表面温度和/或火花
的形式存在。燃料可以是任何易燃材料,例如木材。最后,需要氧气来维持燃烧。
33.如果缺少这三个元素中的一个,就不太可能发生火灾。
34.即使采取预防措施以防止表面温度变得过高和/或防止火花形成,自动存储和取回系统中的风险也永远不能降低到零,因为在上述存储系统的轨道系统上运行的容器搬运车辆是以高电力和高加速度运行的。例如,后一种标准可能会产生摩擦,从而可能在轨道系统上的碎片上引发火灾。此外,充电站可能会产生火花或高温,从而引发火灾。
35.然而,可以控制或保持存储设施内的不易燃或接近不易燃的大气,从而大大降低火灾的危险。海平面大气中的氧气浓度约为每体积21%。这种氧气浓度足够高,足以让火点燃。在较低的氧气浓度下(例如,低于16%),着火的风险大大降低。
36.在杂志“the wagner group customer magazine”(3/2018)中的文章“wagnerimpulse”中描述了这种降低氧气浓度的存储设施,以防止火灾的发生。低氧气浓度是通过迫使氧气减少的空气进入整个存储设施来获得的。
37.然而,交换整个存储设施的空气既费时又费力。此外,这样的解决方案阻碍了人类在存储设施内工作。人类可能在氧气体积低于约13%的区域工作。但是,氧气浓度如此之低的情况下,工人们在工作2小时后至少需要30分钟的休息时间。
38.此外,本文没有提出任何在长时间(如几天)内保持如此低氧气浓度的解决方案。例如,本文没有给出存储系统如何操作以在不增加氧气浓度的情况下将箱运进或运出存储系统的指示。这样的操作将需要存储系统经常暴露于大气中。
39.因此,本发明的目的是提供一种自动存储和取回系统以及用于操作这种系统的方法,其解决或至少减轻与使用现有技术存储和取回系统相关的上述一个或多个问题。
40.本发明的具体目的是提供允许在存储系统内搬运位于具有不同于周围环境的环境的空间中的容器的解决方案。
41.对于本发明的一个或多个实施例,另一个目的是提供显著降低了在操作期间存储系统内部或其上发生火灾的风险,并且与如上所述的现有技术存储系统相比,不会显著降低操作效率的解决方案。
42.对于本发明的一个或多个实施例,另一个目的是提供可以控制其中布置存储系统的环境的物理特征的解决方案。
43.对于本发明的一个或多个实施例,另一个目的是提供可以区分存储系统内部和/或附近的现有火灾的解决方案。
44.对于本发明的一个或多个实施例,本发明的另一个目的是提供允许安全长期存储生物物种和/或新鲜食品的解决方案。
技术实现要素:
45.在主要权利要求中阐述并表征了本发明,而从属权利要求描述了其他可选地/优选地特征。
46.在第一方面中,本发明涉及一种用于隔离自动存储和取回系统的气体的存储设施。
47.在第一方面内的一个或多个实施例中,本发明涉及一种用于控制自动存储和取回系统中的气体浓度的存储设施。
48.该存储设施包括包围存储和取回系统的存储空间,该存储和取回系统包括存储网格,该存储网格被配置为将多个存储容器存储在竖直堆叠中,以及第一上部车辆支架,例如在存储网格上方的上水平面(pu)中(即,在垂直于竖直堆叠的平面中)延伸的轨道系统。
49.该系统进一步包括容器搬运车辆,该容器搬运车辆被配置为借助于在所述第一上部车辆支架上的至少两个位置之间的车轮布置来运输多个存储容器中的至少一个,并且借助于能够提升和降低至少一个存储容器的提升装置来竖直移动至少一个存储容器。
50.该系统进一步包括第一下部车辆支架,例如在第一上部车辆支架下方的下水平面(p
l
)中延伸的轨道系统,以及在第一下部车辆支架上方的存储空间的下部内操作的容器交付车辆。容器交付车辆被配置为从容器搬运车辆接收至少一个存储容器,并借助于车轮布置在第一下部车辆支架上的至少两个位置之间运输至少一个存储容器。
51.该系统进一步包括传输空间,该传输空间包括第二下部车辆支架,例如在下水平面p
l
中延伸并相对于第一下部车辆支架布置的轨道系统,使得容器交付车辆可以在存储空间的下部和传输空间的下部之间移动,以及分隔存储空间和传输空间的第一分隔墙。
52.第一分隔墙包括第一下开口和第一下可关闭门,第一下开口的大小和位置允许容器交付车辆穿过存储空间的下部和传输空间的下部之间,并且第一下可关闭门被配置为打开和关闭第一下开口。
53.存储空间和传输空间的外壳可以包括四个竖直墙、一个基座和一个天花板。然而,可以设想其他限制配置。
54.注意,术语“气体隔离”在下文中定义为在典型的操作时间段内,例如超过4小时,具有轻微气体泄漏的封闭空间。例如,轻微泄漏可能是在4小时的操作期间小于5%的泄漏。
55.该系统可进一步包括与存储空间流体连通的气体调节装置。
56.该气体调节装置可以被配置为在操作之前和/或期间调节存储空间内的气体的气体成分,例如降低和/或提高第一气体浓度,例如o2浓度。如果需要,可以通过在降低/提高第一个提到的气体浓度期间或之后注入/提取另一气体来保持压力恒定。以同样的方式,可以将压力升高或降低到另一预定水平。例如,将o2浓度降低到10%可伴随着相应地提高n2浓度,以保持存储空间内1个大气压(约101kpa)的压力。在某些情况下,富氧空气也可能被证明是有益的,例如在存储和/或处理某些生物样本/食品物品时。
57.可替代地或附加地,对于气体调节装置,该系统可以包括灭火系统或被配置为将灭火物质注入存储空间以区分其中的火灾的装置。灭火物质中的至少一种可以是包括argonite ig-55(惰性气体,包括50%氩和50%氮)、co2、七氟丙烷(也称为hfc-227ea)、n2和加压水中的至少一种的气体。灭火装置可以布置在确保灭火物质扩散到存储空间中的任何位置。例如,灭火装置可以布置在存储空间内和/或至少部分地布置在包围存储空间的一个或多个墙内和/或布置在存储空间外。可以通过允许灭火物质经由一个或多个流体/气体入口从灭火装置流入存储空间来实现后一种布置。
58.灭火装置可进一步包括在存储空间内均匀地或接近均匀地分配灭火物质的装置和/或将灭火物质瞄准存储空间内的特定位置/区域的装置。仅作为示例,该装置可以包括多个喷嘴,这些喷嘴指向存储设施的存储列和/或指向用于在存储列顶部和/或充电站位置上操作的容器搬运车辆的任何操作空间。
59.该系统可替代地或附加地包括冷却设施,该冷却设施被配置为将存储空间冷却到
低于环境温度的温度,例如冷却到10℃或以下,更优选地是5℃或以下,例如2℃。至于具有灭火装置的示例性配置,冷却设施可以布置在确保存储空间内所需冷却的任何位置。例如,冷却设施可以布置在存储空间内和/或至少部分地布置在包围存储空间的一个或多个墙内和/或布置在存储空间外。可以通过让冷却的流体经由一个或多个流体/气体入口从冷却设施流入存储空间来实现后一种布置。
60.例如,冷却设施可以包括制冷回路和/或冷凝单元。
61.如上所述,该系统进一步包括传输空间,该传输空间包括第二下部车辆支架,其在下水平面p
l
中延伸并相对于第一下部车辆支架布置,使得容器交付车辆可以在存储空间的下部和传输空间的下部之间移动,以及分隔存储空间和传输空间的第一分隔墙。容器交付车辆可以在存储空间的下部和传输空间的下部之间移动,而不需要任何外部干预。第二下部车辆支架相对于第一下部车辆支架的布置可以通过使彼此相邻的车辆支架对齐或添加连接两个车辆支架的连杆或其组合来执行。两个车辆支架也可以彼此集成,从而构成一个连续支架。
62.同样如上文所述,第一分隔墙包括第一下开口和第一下可关闭门,第一下开口的大小和位置允许容器交付车辆穿过存储空间的下部和传输空间的下部之间,并且第一下可关闭门被配置为打开和关闭第一下开口。例如,第一下开口可以具有至少对应于两个并排放置的容器搬运车辆的宽度的尺寸,例如三个的宽度。
63.限制存储空间和传输空间的外部边界优选地是气密的,或接近气密的,除了处于打开位置时的可关闭门。
64.第一下可关闭门可以被配置为通过使用远程控制系统远程打开和关闭,例如通过用于控制容器搬运车辆和/或容器搬运车辆的操作的相同控制系统远程打开和关闭。
65.第一下可关闭门可进一步被配置为当第一下可关闭门例如通过使用橡胶垫片关闭第一下开口时,在存储空间和传输空间之间形成流体密封。这样的橡胶垫片可以围绕第一上可关闭门的外周边,和/或第一上开口的内周边。
66.存储设施可进一步包括适用于在存储空间内搬运从存储和取回系统运送或运送到存储和取回系统的存储容器的搬运空间,以及优选地以流体密封的方式分隔搬运空间和传输空间的第二分隔墙。本文将流体定义为包括诸如气体、蒸气等物质。
67.第二分隔墙在示例性实施例中包括第二下开口和第二下可关闭门,第二下开口的大小和位置允许容器交付车辆穿过传输空间的下部和搬运空间的下部之间,并且第二下可关闭门被配置为打开和关闭第二下开口。第二下开口可以具有至少对应于两个并排放置的容器搬运车辆的宽度的尺寸,例如三个的宽度。此外,第二下可关闭门优选地被配置为从远程控制系统远程操作,例如用于操作容器搬运车辆和/或容器搬运车辆的控制系统。
68.搬运空间可以包括第三下部车辆支架,例如在下水平面p
l
中延伸的轨道系统。第三下部车辆支架可以与第一和第二下部车辆支架相同的方式相对于第二下部车辆支架布置,即,容器交付车辆可以通过传输空间的下部和搬运空间的下部之间的第二下开口在第二下部车辆支架和第三下部车辆支架之间移动,优选地不需要任何外部干预。如上所述,这可以通过使彼此相邻的车辆支架对齐或添加连接两个车辆支架的连杆或其组合来实现。第二和第三车辆支架也可以彼此集成,从而构成一个连续支架。
69.搬运空间可进一步包括容器交付站,该容器交付站被配置为接收由容器交付车辆
传递的存储容器以用于进一步搬运,或者将存储容器交付到容器交付车辆以用于将存储容器存储到存储和取回系统中,或者其组合。
70.容器交付站优选地布置在与上水平面pu不同的竖直位置上,例如在下水平面p
l
处或附近。
71.容器交付车辆可以沿着第三下部车辆支架从第二下部开口移动到邻近容器交付站的位置。
72.存储设施可以包括位于第一上部车辆支架下方的交付部分,该交付部分没有存储容器的堆叠。在该示例中,交付部分包括存储空间的下部,该下部从第一下部车辆支架竖直延伸到至少是其上存储有或打算存储有存储容器的容器交付车辆的高度的高度。
73.存储空间的下部的上竖直位置可以由一个或多个水平横梁设置,优选地从第一分隔墙延伸到交付部分的相对边界(远离墙)。最优选地,存储空间包含沿墙的整个宽度布置的多个水平横梁。
74.第一下部车辆支架可以是下部轨道系统,该下部轨道系统包括布置在下水平面p
l
中并在第一方向x上延伸的第一组下部平行轨道,以及布置在下水平面p
l
中并在与第一方向x正交的第二方向y上延伸的第二组平行轨道。因此,第一组和第二组平行轨道在下水平面p
l
中形成网格图案,该网格图案包括多个长度为lc和宽度为wc的相邻网格单元,每个网格单元包括由第一组下部平行轨道的一对相邻轨道和第二组下部平行轨道的一对相邻轨道限定的网格开口。此外,在该示例中,容器交付车辆的车轮布置被配置为允许沿着下部轨道系统在第一方向x和第二方向y上移动。
75.上部车辆支架可以是上部轨道系统,该上部轨道系统包括布置在上水平面pu中并在第一方向x上延伸的第一组上部平行轨道,以及布置在上水平面pu中并在与第一方向x正交的第二方向y上延伸的第二组平行轨道。因此,第一组和第二组平行轨道在上水平面pu中形成网格图案,该网格图案包括多个长度为lc和宽度为wc的相邻网格单元,每个网格单元包括由第一组下部平行轨道的一对相邻轨道和第二组上部平行轨道的一对相邻轨道限定的网格开口。在该示例中,容器搬运车辆的车轮布置被配置为允许沿着上部轨道系统在第一方向x和第二方向y上移动。
76.上部车辆支架和下部车辆支架可以具有相同或接近相同的配置。
77.第一分隔墙可进一步包括第一上开口和第一上可关闭门,第一上开口的大小和位置允许容器搬运车辆穿过,第一上可关闭门被配置为打开和关闭第一上开口。
78.存储设施可进一步包括第二上部车辆支架,例如在上水平面(pu)中延伸并相对于第一上部车辆支架布置的轨道系统,使得容器搬运车辆可以通过第一上开口在存储空间和传输空间之间移动,优选地不需要任何外部干预。如上所述,对于第一和第二下部车辆支架以及对于第二和第三下部车辆支架,第一和第二上部车辆支架的布置可以通过相对于彼此对齐车辆支架或添加连接两个车辆支架的连杆或其组合来实现。两个车辆支架也可以构成一个集成支架。
79.第一上开口可以具有至少对应于两个并排放置的容器搬运车辆的宽度的尺寸,例如三个的宽度。
80.第二分隔墙可以包括第二上开口和第二上可关闭门,第二上开口的大小和位置允许容器搬运车辆从传输空间穿过到搬运空间,并且从搬运空间穿过到传输空间,并且第二
上可关闭门被配置为打开和关闭第二上开口。可以优选地远程控制打开和关闭。此外,通过第一和第二上可关闭门分别关闭第一和第二上开口优选地布置成实现流体密封关闭,例如气密/气密。
81.如果存在气体调节装置,则气体调节装置可以有利地包括气体容器,该气体容器包括将具有初始可燃气体浓度c
oi
的气体或气体混合物转换为具有小于初始可燃气体浓度c
oi
的最终可燃气体浓度c
of
的转换气体/气体混合物的装置,以及至少一个允许在所述气体容器和存储空间之间流体连通的气体入口。
82.气体调节装置优选地安装在存储空间的外部,并且被配置为通过经由至少一个气体入口将转换气体从气体容器引导到存储空间中,将存储空间内的初始气体至少部分地替换为转换气体。
83.初始气体,即,在转换之前,可以是大气压力(1大气压)下的空气含有大约78%的氮和21%的氧。(这里,气体混合物中气体的百分比用体积百分比表示。)可燃气体浓度(c
oi
,c
of
)在本示例中是氧气(o2)的浓度。例如,通过气体调节装置进行转换的结果可以是将氧气浓度从最初的21%降低到等于或小于16%的浓度。
84.可以通过本领域公知的方法来执行转换。例如,见“the wagner group customer magazine”(3/2018)中的文章“wagnerimpulse”,以降低空气容器内空气中的氧气浓度。该文章通过引用并入本文。
85.存储设施可进一步包括一个或多个可燃气体传感器,例如一个或多个o2气体传感器,其安装在传输空间内用于测量可燃气体的浓度。测量可以连续执行,或者以特定的时间间隔执行,或者根据操作者的请求执行,或者它们的组合执行。这种可燃气体传感器也可以安装在存储空间和/或搬运空间内。
86.在该示例性配置中,气体调节装置被配置为通过经由至少一个气体入口将转换气体/气体混合物从气体容器引导到存储空间中,将存储空间内的初始气体/气体混合物至少部分地替换为转换气体/气体混合物。
87.在第二方面中,本发明涉及一种用于根据上述任何特征降低布置在存储设施的存储空间内的存储和取回系统内或处的火灾风险的方法。
88.该方法包括以下步骤:将具有初始可燃气体浓度c
oi
的气体容器内的气体或气体混合物(例如21%o2)转换为最终可燃气体浓度c
of
小于初始可燃气体浓度c
oi
的转换气体/气体混合物(例如小于16%o2),并且通过经由至少一个气体入口将转换气体/气体混合物从气体容器引导到存储空间中,将存储空间内的初始气体/气体混合物至少部分地替换为转换气体/气体混合物。
89.该方法可进一步包括以下步骤:使用提升装置拾取存储在存储网格内的多个存储容器中的至少一个存储容器;将至少一个存储容器竖直向下降低到交付部分内的容器交付车辆;打开第一下可关闭门;通过第一下开口将容器交付车辆从存储空间的下部移动到传输空间的下部;以及关闭第一下可关闭门。
90.第一下可关闭门可以由诸如遥控电机的电机打开,或者由来自打算穿过的容器交付车辆的水平压力打开,或者它们的组合。
91.此外,第一下可关闭的门可以通过使用电机关闭,或者通过使门由于重力而下降或其组合关闭,或者它们的组合。
92.第一下可关闭门可包括门状结构,即,具有对应于第一上开口的尺寸的宽平面结构。可替代地,第一下可关闭门可以包括多个从第一下开口的上框架悬挂的条带,这些条带垂下并逐边对齐以关闭第一下开口,从而允许容器交付车辆在施加压力期间通过条带分离穿过,随后在完全通过后逐边重新对齐条带,以重新关闭第一下开口。
93.如果存储设施进一步包括用于在存储空间内搬运从存储和取回系统运送或运送到存储和取回系统的存储容器的搬运空间和分隔搬运空间和传输空间的第二分隔墙,其中,第二分隔墙包括第二下开口和第二下可关闭门,第二下可关闭门的大小和位置允许容器交付车辆穿过,第二下可关闭门被配置为打开和关闭第二下开口,则该方法可进一步包括以下步骤:打开第二下可关闭门;通过第二下开口将容器交付车辆从传输空间的下部移动到搬运空间中;以及关闭第二下可关闭门。第二下可关闭门可以与第一下可关闭门相同的方式打开和关闭。
94.该方法可进一步包括以下步骤:调节第一下可关闭门的关闭和第二下可关闭门的打开之间的时间间隔δ二,以确保存储空间内的最终可燃气体浓度c
of
保持在预定的最大水平c
o,max
(例如16%o2气体)以下。时间间隔的调节可以由远程控制系统控制,优选地是操作容器搬运车辆的同一控制系统。
95.该方法可进一步包括连续地或以特定的时间间隔或根据操作者的请求的组合测量传输空间内的最终可燃气体浓度(c
of
)的步骤。可以使用如上所述的气体传感器执行测量。此外,测量和设置也可以布置在存储空间和/或搬运空间内。
96.该方法可进一步包括连续调节存储空间内的气体以进一步降低最终可燃气体浓度(c
of
)或保持最终可燃气体浓度(c
of
)恒定或接近恒定的步骤。气体调节也可以间隔和/或根据操作者的要求执行。后者的示例可以是当o2浓度上升到某一预定水平以上时。
97.在第三方面中,本发明涉及一种用于根据上述任何特征来扑灭布置在存储设施的存储空间内的存储和取回系统内或处的火灾的方法。
98.该方法包括当检测到/观察到火灾时将灭火物质注入存储空间的步骤。灭火物质例如可以是灭火流体,例如水或co2。
99.至于第二方面,该方法可进一步包括以下步骤:使用提升装置拾取存储在存储网格内的多个存储容器中的至少一个存储容器;将至少一个存储容器竖直向下降低到交付部分内的容器交付车辆;打开第一下可关闭门;通过第一下开口将容器交付车辆从存储空间的下部移动到传输空间的下部;以及关闭第一下可关闭门,例如通过使用专用电机和/或简单地由于重力的影响而使门关闭。
100.在第四方面中,本发明涉及一种用于根据上述任何特征将存储设施的存储空间冷却到低于环境温度的期望温度的方法。
101.该方法包括将存储空间冷却到预定温度的步骤,例如降低到低于10℃的温度。存储空间可以由冷却装置冷却,该冷却装置例如可以包括制冷回路和/或冷凝单元。
102.至于第二和第三方面,该方法可进一步包括以下步骤:使用提升装置拾取存储在存储网格内的多个存储容器中的至少一个存储容器;将至少一个存储容器竖直向下降低到交付部分内的容器交付车辆;打开第一下可关闭门;通过第一下开口将容器交付车辆从存储空间的下部移动到传输空间的下部;以及关闭第一下可关闭门,例如通过使用专用电机和/或简单地由于重力的影响而使门关闭。
附图说明
103.附上以下附图以促进对本发明的理解。附图示出了本发明的现有技术和实施例,现在仅以示例的方式对其进行描述,其中:
104.图1是现有技术的自动存储和取回系统的透视图,该系统包括上部运输轨道系统,多个远程操作的容器搬运车辆在该上部运输轨道系统上操作,以及用于存储容器堆叠的存储网格。
105.图2是图1所示存储网格的双轨网格单元的顶视图。
106.图3是现有技术的容器搬运车辆的透视图,其具有用于在下面容纳存储容器的悬臂。
107.图4是根据本发明的第一实施例的存储设施的侧视图。
108.图5是如图1所示的存储网格的一部分和多个远程操作的容器搬运车辆在其上操作的下部交付轨道系统的透视图。
109.图6是可在图5所示的下部交付轨道系统上操作的容器交付车辆的透视图。
110.图7是根据本发明的第二实施例的存储设施的侧视图。
111.图8是根据本发明的第三实施例的存储设施的侧视图。
具体实施方式
112.在下文中,将参考附图更详细地讨论本发明的实施例。然而,应当理解,附图并非旨在将本发明限制于附图中描绘的主题。此外,即使仅针对系统描述一些特征,显然它们也适用于相关方法,反之亦然。
113.参考图1,形成框架结构100的一部分的自动存储和取回系统1的存储网格104总共包含1144个网格单元,其中存储网格104的宽度和长度对应于143个网格列的宽度和长度。存储网格104上方的框架结构100的顶层是上部运输轨道系统108,多个容器搬运车辆200在其上运行。
114.本发明的自动存储和取回系统1(以下简称存储系统1)的框架结构100根据上述现有技术框架结构100构造,即,多个直立构件102和由直立构件102支撑的一个或多个水平构件103。
115.上部运输轨道系统108包括分别在x方向和y方向定向的平行轨道110、111,并布置在包含存储容器106(以下简称容器106)的堆叠107的存储列105的顶部。单个网格单元122的水平区域,即,沿x和y方向,可以分别由相邻轨道110和111之间的距离限定。在图1中,这样的网格单元122在上部运输轨道系统108上用粗线标记。
116.如图2所示,每个网格单元122可以用网格单元宽度wc和网格单元长度lc来描述,由此产生宽度wo和长度lo的网格开口115。每个网格位置与网格单元122相关联。
117.上部运输轨道系统108允许适于在轨道上移动的容器搬运车辆200以准确和稳定的方式在不同网格位置之间水平移动。
118.在图1中,包括存储列105的存储网格104被示出为具有八个网格单元的高度。然而,应当理解,存储网格104原则上可以是任意大小的。具体地,应当理解,存储网格104可以比图1中公开的宽得多和/或长得多。例如,存储网格104可以具有超过700x700个网格单元122的水平范围。此外,网格104可以比图1中公开的要深得多。例如,存储网格104的深度可
以大于10个网格单元122。
119.容器搬运车辆200可以是本领域已知的任何类型,例如,在wo2014/090684a1、no317366或wo2015/193278a1中公开的自动化容器搬运车辆中的任何一种。
120.图1示出了在wo2015/193278a1中公开的类型的容器搬运车辆200,而图3示出了在no317366中公开的类型的容器搬运车辆200,即容器搬运车辆200,该容器搬运车辆200包括车身202、附接到车身202的一组车轮201和在下面具有提升装置203的悬臂。提升装置203被配置为分别将容器106从存储列105提升和降低到存储列105中。
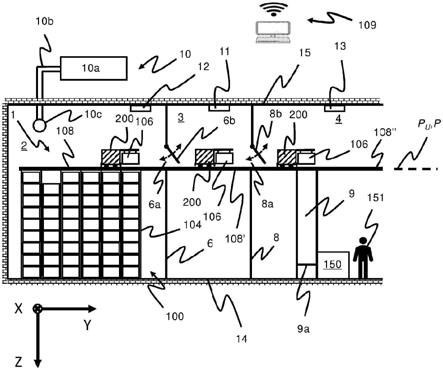
121.图4示出了根据本发明的第一实施例的存储设施的侧视图。正的x-、y-和z-方向分别从附图的左到右和从附图的上到下引导到附图中。
122.存储设施被布置在存储系统1的x和y方向两侧的外部竖直墙和z方向上的水平基座14和天花板15分成三个流体密封部分2-4,从而设置了存储设施的外部边界,以及两个内部间隔开的竖直分隔墙,以下称为第一分隔墙6和第二分隔墙8,它们都布置在存储系统1的y方向一侧(图4中的右侧)。注意,在本文中,流体密闭部分是指在部分的边界处的门处于关闭位置的时间段内流体密闭。此外,流体密闭是指气体和/或蒸气等气态物质没有泄漏或泄漏不严重。
123.这三个部分被定义为:
[0124]-位于第一分隔墙6左侧的存储空间2,其中布置有图1所示类型的自动存储和取回系统1(具有第一上部运输轨道系统108),
[0125]-位于第一分隔墙6和第二分隔墙8之间的传输空间3,该传输空间包含第二上部运输轨道系统108',该第二上部运输轨道系统与存储空间2内的第一上部运输轨道系统108附接或集成,以及
[0126]-位于第二分隔墙8的右侧的搬运空间4,在1个大气压的空气中工作,包含第三上部运输轨道系统108”,该第三上部运输轨道系统与第二上部运输轨道系统108'附接或集成。
[0127]
第一、第二和第三上部运输轨道系统108、108'、108”都布置在上层pu。
[0128]
第一墙和分隔墙6、8,以及传输空间3和搬运空间4可以附加地或可替代地布置在存储系统1的左侧。
[0129]
如图4所示,搬运空间4包含布置在存储设施的基座14处或附近的容器交付站150和在第三上部运输轨道系统108”和交付站150之间延伸的容器引导列9。容器引导列9被配置为将已经由容器搬运车辆200插入柱9中的容器106引导到交付站150或从交付站150返回。
[0130]
在图4所示的示例中,容器引导列9进一步配备有下部平台9a,在从存储系统1中运输到交付站150之前,容器106放置在该下部平台9a上,或者在运输到存储系统1中时,在由容器搬运车辆200提升到第三上部运输轨道系统108”之前,容器106放置在该下部平台9a上。
[0131]
容器106在下部平台9a和交付站150之间的移动可以由人类操作者51或机器人操作者或传送带或其组合来执行。
[0132]
此外,通过容器引导列9提升或降低容器106可以通过专用升降机来执行,来代替或者除了使用容器搬运车辆200内的提升装置203之外。
[0133]
除了将容器106竖直地运送到交付站150的容器引导列9之外,或者作为替代方案,可以通过一个或多个向下倾斜的传送带(未示出)来执行从第三上部运输轨道系统108”到交付站150的运输。
[0134]
第一上部运输轨道系统108与第二上部运输轨道系统108'的附接或集成,以及第二运输轨道系统108'与第三上部运输轨道系统108”的附接或集成,使得容器搬运车辆200可以在不同的轨道系统108、108'、108”之间自由移动。
[0135]
第一和第二分隔墙6、8都包括至少一个上开口6a、8a,其位于上部运输轨道系统108、108'、108”的两个连接点正上方,即在第一和第二上部运输轨道系统108、108'之间以及在第二和第三上部运输轨道系统108',108”之间,并且具有允许至少一个容器搬运车辆200通过的尺寸,例如比容器搬运车辆200的总高度(包括任何位于顶部的装置,如天线)高10%的轨道凹槽上方的高度,以及与穿过一个网格单元122或两个网格单元122或三个网格单元122在x方向上的距离相对应的宽度。在本文中,凹槽被定义为车辆200的车轮被引导到其中的轨道的受限轨道。
[0136]
每个上开口6a、8a配备有上可关闭的门6b、8b,当容器搬运车辆200在不同轨道系统108、108'、108'之间通过上开口6a、8a移动时,该门可以打开,并且当容器搬运车辆200完全通过相应的上开口6a、8a时,该门可以关闭。
[0137]
上门6b、8b的打开和关闭优选地由远程控制系统109控制,该远程控制系统还控制容器搬运车辆200和存储系统1上存在的任何充电站(未示出)的移动。在该示例性实施例中,上门6b、8b包括被配置为允许上门6b、8b的必要的移动的机动系统(未示出),例如,驱动旋转件的电机,引起上门6b、8b的可枢转移动,或者驱动线性致动器的电机,引起上门6b、8b的线性、竖直移动。还可以预见配置为提升/降低上门6b、8b或枢转上门6b、8b的绞车系统。
[0138]
然而,在不使用任何电机系统的情况下执行打开和关闭是可行的。例如,上门6b、8b中的至少一个可在上开口6a、8a的上边缘处铰接到相应的分隔墙6、8,使得上门6a、8a枢转至空间2、3、4中,在该空间中容器搬运车辆200通过车辆200施加的推力而移动。因此,通过重力实现上门6b、8b的关闭,可能通过在上门6b、8b上增加重物和/或在上门6b、8b和设置上开口6a、8a的分隔墙6、8的边界之间安装机械和/或磁性关闭机构来辅助。
[0139]
为了至少降低存储系统1所在的存储空间2内的火灾风险,存储设施配备有气体调节装置10,该气体调节装置10包括位于存储空间2外部的气体容器10a、进入存储空间2的气体入口10c和在气体容器10a和气体入口10c之间流体连通的气体管10b。通过这种布置,允许气体在气体容器10a和存储空间2之间流动。
[0140]
气体容器10a包括用于减少(或增加)诸如空气中o2气体的气体混合物中的气体元素的装置。这样的装置在本领域中是已知的,因此在此将不作进一步解释。例如,“the wagner group customer magazine”(3/2018)中的文章“wagnerimpulse”。
[0141]
在干燥空气中,可燃气体氧气的浓度约为21%。如果氧气浓度降低到16%或以下,火灾风险显著降低。在空气中,可能发生火灾,例如,由于来自容器搬运车辆200的移动的火花和/或来自用于给车辆200内的电池充电的充电站(未示出)的火花和/或容器106内的内容物的燃烧和/或诸如由阳光照射存储系统1内的易燃材料引起的意外加热。
[0142]
存储空间2和搬运空间4之间的流体密闭分离确保容器搬运车辆200可以存储和取出位于氧气减少的大气中的容器106,其具有降低或不显著的火灾风险,但对人类健康构成
风险,以及将容器106接收和交付到人类可以安全工作的工作空间。
[0143]
此外,通过在存储空间2和搬运空间4之间布置流体密闭的传输空间3,可以最小化容器搬运车辆200在存储空间2和搬运空间4之间传输期间从存储空间2泄漏的流体量。实际上,分隔墙6、8和中间的传输空间3充当气闸(具有两个串联的气密门的室(上开口6a、8a,由上门开口6b、8b)密封,上门开口6b、8b最好不同时打开)。
[0144]
例如,在存储空间2和传输空间3中最初包含约21%氧气的空气可以被具有减少的氧气浓度例如16%或更少的空气状气体混合物取代(使用气体调节装置10)。然而,搬运空间4内空气中的氧气浓度不会被替换,并保持在通常的大气水平。
[0145]
在操作期间,由于第二上可关闭门8b的重复打开,传输空间3中的氧气浓度将增加,从而引起搬运空间4和传输空间3之间的气体交换。然而,由于当第二上可关闭门8b打开时,第一上可关闭门6b将关闭,所以在搬运空间4中存在的很少或微不足道的空气将与在存储空间2中存在的气体混合物交换。因此,在操作期间,存储空间2中的氧气浓度的不期望的增加将比传输空间3中的快。
[0146]
有利的是监测存储设施中的氧气浓度,特别是存储空间2内的氧气浓度。在图4所示的示例性实施例中,存储设施在存储空间2中配备有氧气传感器12,在传输空间3中配备有氧气传感器11,并且在搬运空间4中配备有氧气传感器13。所有这些氧气传感器11-13在图4中示出,安装到存储设施的天花板15上。然而,氧气传感器可以安装在它们各自的空间2-4内的任何地方。
[0147]
存储空间2中的氧气传感器12的目的主要是确保氧气浓度保持在预定的最大浓度以下,例如16%的氧气浓度,而搬运空间4中的氧气传感器13的目的主要是确保氧气浓度保持在被认为对人类安全的水平。最后,传输空间3中的氧气传感器11的目的主要是监测存储空间2和传输空间3之间的任何泄漏以及搬运空间4和传输空间3之间的任何泄漏的程度。
[0148]
气体传感器11-13的测量可以通过操作者的请求或其组合以时间间隔连续进行。
[0149]
但是,本发明的存储设施不限于降低火灾风险。
[0150]
允许控制气体浓度的存储设施的使用范围的另一示例是新鲜食品的存储。现有技术的试验表明,苹果等水果最好长期存储在含有1%o2和1-2.5%co2的大气中。o2气体可以用n2气体代替。
[0151]
如上所述,存储设施可替代地或附加地包括灭火装置和/或冷却设施。
[0152]
具有用于将存储空间冷却到低于10℃的温度的冷却设施和气体调节装置10、10a-c的存储设施可以为新鲜食品的存储创造接近理想的条件。
[0153]
存储设施的这种新鲜食品配置可由灭火装置补充,以减少火灾危险。
[0154]
在图5中部分地示出了不同的存储系统1,其中直立构件102构成框架结构100的一部分,具有多个容器搬运车辆200的上部运输轨道系统108在框架结构100上运行。
[0155]
在上部运输轨道系统108下方,靠近基座14处,示出了另一个框架结构,该框架结构包括竖直列和下部交付轨道系统308,该下部交付轨道系统308至少部分地延伸到存储网格104的一些存储列105下方。对于较高的框架结构100,多个车辆300可以在下部交付轨道系统308上操作。与上部运输轨道系统108类似或相同,下部交付轨道系统308包括在第一方向x上定向的第一组平行轨道310和在垂直于第一方向x的第二方向y上定向的第二组平行轨道311,从而在下水平面p
l
(与上水平面pu相比更靠近基座14布置)中形成网格图案,该下
水平面p
l
包括多个矩形且均匀的网格位置或网格单元322(在图5中由较粗的线指示)。该下部交付轨道系统308的每个网格单元322包括由第一组轨道310的一对相邻轨道310a、310b和第二组轨道311的一对相邻轨道311a、311b界定的网格开口315。交付轨道系统308和交付轨道系统308正上方的存储列105之间的竖直方向z上以及存储空间2内的水平面p
l
上的体积在下文中被称为下部存储空间2'。此外,存储网格104的位于下部存储空间2'和上部运输轨道系统108之间的部分在下文中被称为交付部分121(见图7)。
[0156]
下部交付轨道系统308的延伸到存储列105下面的部分对齐,使得其在水平面p
l
中的网格单元322与在水平面pu中的上部运输轨道系统108的网格单元122重合。
[0157]
因此,通过两个轨道系统108、308的这种特定对齐,由容器搬运车辆200下降到交付部分121内的存储列105中(即,位于下部存储空间2'的上方)的容器106可以被放置在已经移动到所述存储列105正下方的位置的交付车辆300的存储容器支架302内或上。
[0158]
图6示出了这种容器交付车辆300的示例,该容器交付车辆300包括类似于针对现有技术容器搬运车辆200描述的车轮组件201的车轮组件301和用于接收和支撑由容器搬运车辆200交付的容器106的存储容器支架302。存储容器支架302可以是托盘(如图6所示)、板或能够在沿着下部轨道系统308的水平移动期间支撑容器的任何其他形状。
[0159]
在已经接收到容器106之后,容器交付车辆300可以沿着下水平面p
l
在x和y方向上行驶到下部交付轨道系统308的另一位置。
[0160]
图7示出了根据本发明的第二实施例的存储设施。
[0161]
对于第一实施例,存储设施包括存储空间2、传输空间3和搬运空间4,其中,如上所述的存储系统1的至少一部分经由图7中示例的基座支架16通过多个直立支撑杆安装在基座14上。
[0162]
多个容器搬运车辆200可以在上水平面pu中延伸的上部运输轨道系统108上操作。
[0163]
然而,与第一实施例的存储设施不同,容器搬运车辆200只能在存储空间2内操作。相反,当来自远程控制系统109的指令指示存储系统1从存储网格104取回特定容器106时,容器搬运车辆200(如上所述,在已经从各个堆叠107抬起容器106之后)将容器106运送到交付部分121上方的存储列105,并随后将容器106降低到等待的容器交付车辆300。
[0164]
在已经将容器106接收到存储容器支架302中或其上后,容器交付车辆300(使用车轮布置301)通过第一分隔墙6的第一下开口6b移动到传输空间3的下部传输空间3'中的第二下部交付轨道系统308'上。
[0165]
以与第一实施例的第一和第二运输轨道系统108、108'所描述的类似或相同的方式,第二下部交付轨道系统308'相对于第一下部交付轨道系统308配置,使得容器交付车辆300可以在两个下部交付轨道系统308、308'之间自由移动。
[0166]
进一步与第一实施例的上部运输轨道系统108、108'相似,相对于第一下开口6c安装第一下可关闭门6d,使得当门6d处于关闭位置时,在存储空间2和传输空间3之间的实现流体密封关闭。
[0167]
在图7的示例性配置中,存储网格104的竖直端部123被示出布置在交付部分121和操作容器搬运车辆300的下部存储空间2'之间的边界处。竖直端部可以是一个或多个水平板或多个水平横梁123,其沿x方向延伸穿过存储空间2的深度并沿y方向至少延伸到第一分隔墙6。
[0168]
在图7中,竖直端部123在y方向上进一步穿过传输空间3延伸到第二分隔墙8。因此,下部传输空间3'可以被定义为在x方向上传输空间3或存储系统1的深度,在y方向上第一和第二分隔墙6、8之间的距离,以及在z方向上第二交付轨道系统308'和竖直端部123之间的距离。
[0169]
在容器交付车辆300已经穿过第一下开口6c之后,第一下可关闭门关闭第一下开口6c,同时容器交付车辆300继续到第二分隔墙8,在传输空间3和包含容器交付站150的搬运空间4之间形成流体密闭的分离。与第一分隔墙6类似,第二分隔墙8包括位于第二下部交付轨道系统308'正上方的第二下开口8c和相对于开口8c安装的第二下可关闭门8d,以允许穿过第二分隔墙8的流体/气体密封关闭。
[0170]
对于第一和第二下部交付轨道系统308、308',搬运空间4包含相对于第二下部交付轨道系统308'布置的第三下部交付轨道系统308”,使得容器交付车辆300可以通过第二下开口8c在传输空间3和搬运空间4之间自由移动。
[0171]
第三下部交付轨道系统308”在y方向上至少延伸到容器交付站150,从而允许容器交付车辆300将容器106从第二下开口8c运送到容器交付站150,以便由人和/或机器人操作者151进一步搬运。
[0172]
对于第一实施例,认为有利的是在每个空间2-4内的位置安装一个或多个氧气传感器11-13,以监测氧气浓度,例如在存储设施的天花板15中的。测量可以通过操作者的请求或其组合以时间间隔连续进行。
[0173]
图8示出了本发明的第三实施例的存储设施,其结合了第一和第二实施例的解决方案,表示容器搬运车辆200和容器搬运车辆300都可以在存储空间2和搬运空间4之间运输容器106,以便进一步的搬运。
[0174]
在第三实施例中,下部交付轨道系统308、308'、308”和上部运输系统108、108'、108”设置在由分隔墙6、8隔开的存储设施内的每个空间中。轨道系统108、108'、108”、308、308'、308”以与第一和第二实施例类似或等效的方式在相应开口6a、8a、6c、8c的下边缘处互连。此外,每个开口6a、8a、6c、8c配备有以与第一和第二实施例类似或等效的方式安装的可关闭门6b、8b、6d、8d。
[0175]
在图8中,竖直端部123在y方向上进一步延伸到搬运空间4中,以到达或靠近容器交付站150。因此,下部搬运空间4'可以被定义为在x方向上搬运空间4的深度,在y方向上第二分隔墙8和容器交付站150之间的距离,以及在z方向上第三交付轨道系统308'和竖直端部123之间的距离。在该特定配置中,竖直端部123包括位于容器引导列9内的下部平台9a,其邻近容器交付站150。
[0176]
在前面的描述中,已经参考说明性实施例描述了根据本发明的存储设施的各个方面。出于解释的目的,列出了具体的数字、系统和配置,以提供对系统及其工作原理的透彻理解。然而,该描述不旨在被解释为限制意义。对于公开的主题所属领域的技术人员来说显而易见的说明性实施例以及系统的其他实施例的各种修改和变化被认为落入本发明的范围内。
[0177]
参考数字/字母列表:
[0178]
1自动存储和取回系统
[0179]
2存储空间
[0180]
2'下部存储空间
[0181]
3传输空间
[0182]
3'下部传输空间
[0183]
4搬运空间
[0184]
4'下部搬运空间
[0185]
6第一分隔墙
[0186]
6a第一上开口
[0187]
6b第一上可关闭门
[0188]
6c第一下开口
[0189]
6d第一下可关闭门
[0190]
7分隔传输空间和交付空间的水平横梁
[0191]
8第二分隔墙
[0192]
8a第二上开口
[0193]
8b第二上可关闭门
[0194]
8c第二下开口
[0195]
8d第二下可关闭门
[0196]
9容器引导列
[0197]
9a下部平台
[0198]
10气体调节装置
[0199]
10a气体容器
[0200]
10b气体管
[0201]
10c气体入口
[0202]
11可燃气体传感器/氧气气体传感器(传输空间中)
[0203]
12可燃气体传感器/氧气气体传感器(存储空间中)
[0204]
13可燃气体传感器/氧气气体传感器(搬运空间中)
[0205]
14存储设施的基座
[0206]
15存储设施的天花板
[0207]
16基座支架
[0208]
100框架结构
[0209]
102框架结构的直立构件
[0210]
103框架结构的水平构件
[0211]
104存储网格/三维网格
[0212]
105存储列
[0213]
106存储容器
[0214]
107堆
[0215]
108第一上部车辆支架/第一上部运输轨道系统
[0216]
108'第二上部车辆支架/第二上部运输轨道系统
[0217]
108”第三上部车辆支架/第三上部运输轨道系统
[0218]
109控制系统
[0219]
110第一方向(x)中第一组上部平行轨道
[0220]
110a上部相邻轨道110的第一轨道
[0221]
110b上部相邻轨道110的第二轨道
[0222]
111第二方向(y)中第二组上部平行轨道
[0223]
111a上部相邻轨道111的第一轨道
[0224]
111b上部相邻轨道111的第二轨道
[0225]
115运输轨道系统中的网格开口
[0226]
119第一交付列
[0227]
120第二交付列
[0228]
121存储网格104内的交付部分
[0229]
122运输轨道系统的网格单元
[0230]
123存储网格/水平横梁/板的竖直端部
[0231]
150容器交付站
[0232]
151操作者
[0233]
200容器搬运车辆
[0234]
201容器搬运车辆的车轮布置
[0235]
202容器搬运车辆的车身
[0236]
203容器搬运车辆的提升装置
[0237]
300容器交付车辆
[0238]
301容器搬运车辆的车轮布置
[0239]
302容器搬运车辆的存储容器支架/托盘
[0240]
308第一下部车辆支架/第一下部交付轨道系统
[0241]
308'第二下部车辆支架/第二下部交付轨道系统
[0242]
308”第三下部车辆支架/第三下部交付轨道系统
[0243]
310第一方向(x)中第一组下部平行轨道
[0244]
310a下部相邻轨道110的第一轨道
[0245]
310b下部相邻轨道110的第二轨道
[0246]
311第二方向(y)中第二组下部平行轨道
[0247]
311a下部相邻轨道111的第一轨道
[0248]
311b下部相邻轨道111的第二轨道
[0249]
315交付轨道系统中的网格开口
[0250]
322交付轨道系统的网格单元
[0251]
x第一方向
[0252]
y第二方向
[0253]
z第三方向
[0254]
p车辆支架/轨道系统的水平面
[0255]
p
l
下水平面
[0256]
pu上水平面
[0257]
wc网格单元122的宽度
[0258]
lc网格单元122的长度
[0259]
wo网格开口115的宽度
[0260]
lo网格开口115的长度
[0261]coi
初始可燃气体浓度
[0262]cof
最终可燃气体浓度
[0263]co,max
最终可燃气体浓度(c
of
)的预定最大水平。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。