1.本发明属于舰船消磁技术领域,具体涉及一种分布式消磁系统消磁电流优化调整方法。
背景技术:
2.海军舰船一般都装备了主动消磁系统,其目的是为了补偿舰船磁场,减小舰船受到水中兵器攻击的风险。为了最大限度的发挥主动消磁系统的作用,消磁线圈的安匝数必须进行优化调整,使补偿后的舰船磁场尽可能的小。分布式消磁系统的消磁线圈匝数已固定,主要通过调整每个消磁线圈的电流,使舰船下方一定深度的垂直磁场峰值减小到规定限度。
3.早期的舰船消磁电流优化调整方法在确定舰船磁场特征后,通过查阅线圈消磁效果手册,选择产生最接近舰船现有磁场峰值的线圈或线圈组合,调整其电流和匝数以补偿舰船磁场。然而这种方法仅限于一次调整一个或少数几个线圈,随着消磁线圈数量增多,这种方法越来越难以实施。在近几十年,实验室研究工作中使用了另外一种消磁电流优化调整方法,这种方法通过计算机用最小二乘法算法将所有的消磁线圈的磁场特征拟合到舰船的磁场特征。这种方法能够更好地补偿舰船磁场,但是这种方法仅限于使舰船消磁后剩余磁场的均方根误差最小,不能实现剩余磁场的峰值误差最小。近几年,遗传算法被运用到分布式消磁系统消磁电流优化调整中,其能实现舰船的剩余磁场峰值误差最小。但是遗传算法运行速度慢,实现复杂,需要调整的参数太多,不易实施。
技术实现要素:
4.有鉴于此,本发明提供了一种分布式消磁系统消磁电流优化调整方法,以优化计算算法,简化计算程序,缩短计算时间,使舰船消磁后剩余磁场的峰值误差最小。
5.本发明是通过下述技术方案实现的:
6.一种分布式消磁系统消磁电流优化调整方法,将每个消磁线圈的消磁电流看作一个没有质量没有体积的个体,所有个体组成群体;每个个体都有自己的飞行速度、位置及被适应度函数决定的适应值,所述飞行速度即为消磁电流变化的步长,位置即为消磁电流随该步长变化的电流值;
7.所述消磁电流优化调整方法的具体步骤如下:
8.步骤一,对个体的位置和飞行速度进行初始设定,并将初始位置作为当前的个体历史最优位置,然后比较每个个体的个体历史最优位置,找出初始时的全局历史最优位置;
9.步骤二,对个体的飞行速度和位置进行搜索,并计算每个个体i在当前位置xi的适应度函数f(xi)值;
10.步骤三,对每个个体i,将当前位置xi的适应度函数f(xi)值与当前的个体历史最优位置pi的适应度函数f(pi)值进行比较,若f(xi)<f(pi),则把个体的当前位置xi作为当前的个体历史最优位置pi;若f(xi)≥f(pi),则个体的当前的个体历史最优位置pi保持不变;
11.步骤四,对所有个体,将每个个体i的当前的个体历史最优位置pi的适应度函数f(pi)值分别与当前的全局历史最优位置pg的适应度函数f(pg)值进行比较,若f(pi)<f(pg),则把该个体的当前的个体历史最优位置pi作为当前的全局历史最优位置pg;若f(pi)≥f(pg),则当前的全局历史最优位置pg保持不变;
12.步骤五,根据步骤四得到的当前的全局历史最优位置pg,判断是否达到终止条件,若当前的全局历史最优位置pg所对应的消磁电流达到预设值,则结束消磁电流的调整;若前的全局历史最优位置pg所对应的消磁电流未达到预设值,则重复步骤二至步骤五进行迭代计算,直到当前的全局历史最优位置pg所对应的消磁电流达到预设值或达到预设的最大迭代数,结束消磁电流的调整。
13.进一步的,设群体中的个体个数为n;每个个体的维数均为d;个体i的当前位置为xi=(x
i1
,x
i2
,...,x
id
);个体i的当前飞行速度为vi=(v
i1
,v
i2
,...,v
id
);个体i的个体历史最优位置pi=(p
i1
,p
i2
,...,p
id
);
14.在步骤三中,第t代中个体i的当前的个体历史最优位置pi(t)由下式确定:
[0015][0016]
进一步的,在步骤四中,第t代中整个群体的当前的全局历史最优位置pg(t)由下式确定:
[0017]
pg(t)={p1(t),p2(t),...,pn(t)}|f(pg(t))=min{f(p1(t)),f(p2(t)),...,f(pn(t))}
ꢀꢀ
(2)。
[0018]
进一步的,设群体中的个体个数为n;每个个体的维数均为d;个体i的当前位置为xi=(x
i1
,x
i2
,...,x
id
);个体i的当前飞行速度为vi=(v
i1
,v
i2
,...,v
id
);个体i的个体历史最优位置pi=(p
i1
,pi2,...,p
id
);
[0019]
在步骤二中,第t 1代个体i的飞行速度的搜索公式v
ij
(t 1)和个体i的位置的搜索公式x
ij
(t 1)可分别描述为:
[0020]vij
(t 1)=v
ij
(t) c1
×
r1j(t)*(p
ij
(t)-x
ij
(t)) c2
×
r2j(t)*(pgj(t)-x
ij
(t))(3)
[0021]
x
ij
(t 1)=x
ij
(t) v
ij
(t 1)(4)
[0022]
其中,下标“j”表示个体的第j维;r1~u(0,1),r2~u(0,1)为两个相互独立的随机函数;c1、c2为加速常速,在0~2间取值。
[0023]
进一步的,所述个体i的位置x
ij
∈[-x
max
,x
max
],飞行速度v
ij
∈[-v
max
,v
max
];则v
max
=k
×
x
max
,k为系数,取值为0.1≤k≤1.0,其中,x
max
为最大位置,v
max
为最大速度。
[0024]
进一步的,所述d取值为1,2,3。
[0025]
进一步的,所述分布式消磁系统消磁电流优化调整方法的实施流程如下:
[0026]
第一步,设置计算程序参数;
[0027]
第二步,测量舰船的原始磁场:
[0028]
第三步,测量消磁线圈的绕组效率;
[0029]
第四步,将第二步的舰船的原始磁场和第三步的消磁线圈的绕组效率作为参数输入到程序后,启动程序,程序将自动进行优化迭代计算,直到计算结果满足终止条件后,输出消磁电流的最优化组合,该组合为一列数组,数组中的每一个元素对应一个消磁线圈的消磁电流,将此消磁电流值设置为对应消磁线圈的的实际工作电流,启动消磁系统电源,所
有消磁线圈同时上电工作时,消磁线圈的磁场将补偿舰船磁场,使补偿后的舰船剩余磁场峰值误差最小。
[0030]
有益效果:
[0031]
(1)本发明的消磁电流优化调整方法是一种基于迭代模式的优化调整算法,该算法以舰船消磁后剩余磁场的峰值误差最小为适应度函数,可以得到全局最优解,并且该算法的每个步骤和参数设置都根据舰船消磁系统消磁电流调整的特点进行了有针对性的设计,使得算法直观,编程简单,收敛速度快,计算时间短,可以方便地应用与工程实际。
[0032]
(2)本发明的调整方法中的迭代寻优算法数据输入采取全数值式的实数输入,整个计算过程采用全数值操作,计算输出结果更直观,输出结果能直接指导分布式消磁系统消磁电流的优化调整。
[0033]
(3)本发明的调整方法的实施流程包括设置计算程序参数、测量舰船的原始磁场、测量消磁线圈的绕组效率及输出调整结果,通过以上步骤的操作,能方便快捷的寻找到多个消磁线圈的优化消磁电流组合,可使消磁电流调整工作更加快捷,简单有效,从而达到消磁电流的快速调整及有效补偿舰船磁场的目的。
附图说明
[0034]
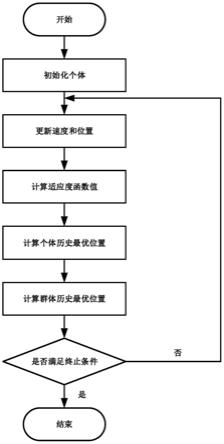
图1为本发明的消磁电流优化调整算法操作步骤图;
[0035]
图2为分布式消磁系统消磁电流优化调整方法实施流程图。
具体实施方式
[0036]
下面结合附图并举实施例,对本发明进行详细描述。
[0037]
本实施例提供了一种分布式消磁系统消磁电流优化调整方法,该方法首先根据消磁系统的需求设定各个消磁线圈的消磁电流的最大调整范围,然后将每个消磁线圈的消磁电流看作寻优空间中的一个没有质量没有体积的个体,所有个体组成群体;每个个体都有自己的飞行速度、位置及被适应度函数决定的适应值,飞行速度和位置决定个体的飞行方向和距离,所述飞行速度即为消磁电流变化的步长,位置即为消磁电流随该步长变化的电流值;个体的飞行方向即消磁电流的增加或减少,距离即消磁电流增加或减少的电流值;根据每个个体的当前的飞行速度、位置及被适应度函数决定的适应值,计算出每个个体的当前的最优值,每个个体均记忆并追随当前的最优值,最后,根据个体与群体的飞行经验综合分析结果来动态调整每个个体的飞行速度及最终的位置;
[0038]
其中,每个个体的适应值取决于所选择的适应度函数的值,并且每个个体都具有以下三类信息:
①
个体当前所处的位置;
②
到目前位置,个体所经历的最优位置pi;
③
到目前位置,整个群体中所有个体所经历的最优位置pg(pg是在pi中的最优值);所述最优位置pi被视为个体的自身飞行经验;所述最优位置pg可视为整个群体的同伴共享飞行经验;因此,每个个体的飞行速度受到自身和群体历史运动状态信息的影响,并以自身和群体的历史最优位置来对个体当前的飞行速度和位置加以影响,很好地协调了个体自身运动和群体运动之间的关系。
[0039]
其中,所述整个群体中所有个体所经历的最优位置pg的迭代寻优算法如下:
[0040]
设群体中的个体个数为n;每个个体的维数均为d(因为舰船磁场分为固定磁场、感
应磁场和涡流磁场,因此每个消磁线圈中的消磁电流就分为固定电流、感应电流和涡流电流,此时个体维数为三维,即d=3,有时不考虑涡流电流,此时d=2,有时固定磁场不通过线圈来补偿,即不考虑固定电流,此时d=1,因此,d取值一般为1,2,3);群体中的任意一个个体为个体i,i=1,2,3,
…
n;个体i的当前位置为xi=(x
i1
,x
i2
,...,x
id
);个体i的当前飞行速度为vi=(v
i1
,v
i2
,...,v
id
);个体i所经历的最优位置pi=(p
i1,
p
i2,
...,p
id
),也就是个体i所经历的具有最优适应值的位置,称为个体历史最优位置pi;所述最优适应值通过适应度函数决定,即所述适应度函数能够使得舰船消磁后剩余磁场的峰值误差最小,设适应度函数为f(xi),适应度函数f(xi)的值越小,对应的适应值越优;
[0041]
则第t代中个体i的当前的个体历史最优位置pi(t)由下式确定:
[0042][0043]
则第t代整个群体中所有个体所经历的最优位置pg(t),即全局历史最优位置pg(t)由下式确定:
[0044]
pg(t)={p1(t),p2(t),...,pn(t)}|f(pg(t))=min{f(p1(t)),f(p2(t)),...,f(pn(t))}
ꢀꢀꢀ
(2)
[0045]
则第t 1代个体i的飞行速度的搜索公式v
ij
(t 1)和个体i的位置的搜索公式x
ij
(t 1)可分别描述为:
[0046]vij
(t 1)=v
ij
(t) c1
×r1j
(t)*(p
ij
(t)-x
ij
(t)) c2×r2j
(t)*(p
gj
(t)-x
ij
(t))
ꢀꢀꢀ
(3)
[0047]
x
ij
(t 1)=x
ij
(t) v
ij
(t 1)
ꢀꢀꢀꢀ
(4)
[0048]
其中,下标“j”表示个体的第j维;“i”表示个体i;“t”表示第t代;r1~u(0,1),r2~u(0,1)为两个相互独立的随机函数;c1、c2为加速常速,通常在0~2间取值,c1为调节个体飞向最优位置方向的步长,c2为调节个体飞向全局最优位置方向的步长;
[0049]
个体i的搜索空间限定在[-x
max
,x
max
]内,即个体i的位置x
ij
∈[-x
max
,x
max
],为了减少在进化过程中,个体离开搜索空间的可能性,v
ij
通常现定于一定范围内,即v
ij
∈[-v
max
,v
max
];则v
max
=k
×
x
max
,k为系数,取值为0.1≤k≤1.0,x
max
为最大位置,v
max
为最大速度;
[0050]
其中,公式(1)、公式(2)、公式(3)及公式(4)的数据输入采取全数值式的实数输入,使得整个计算过程采用全数值操作,计算输出结果更直观。
[0051]
参见附图1,所述消磁电流优化调整方法的具体步骤如下:
[0052]
步骤一,对所述群体和个体进行初始化,初始化过程为:
①
设定群体规模n,即群体中的个体个数为n;
②
设定个体i的位置x
ij
∈[-x
max
,x
max
],即对任意的i和j,在[-x
max
,x
max
]内服从均匀分布产生x
ij
;
③
设定个体i的v
ij
∈[-v
max
,v
max
],即对任意的i,j,在[-v
max
,v
max
]内服从均匀分布产生v
ij
;
[0053]
步骤二,依照初始化过程,对个体的位置和飞行速度进行初始设定,并将初始位置作为当前的个体历史最优位置,即设定pi=xi;然后比较每个个体的个体历史最优位置pi,找出初始时的全局历史最优位置pg;
[0054]
步骤三,根据公式(3)和公式(4)分别对个体的飞行速度和位置进行搜索,并计算每个个体在当前位置的适应度函数f(xi)值;
[0055]
步骤四,对每个个体,将当前位置xi的适应度函数f(xi)值与当前的个体历史最优位置pi的适应度函数f(pi)值进行比较,若f(xi)<f(pi),则把个体的当前位置xi作为当前的
个体历史最优位置pi;若f(xi)≥f(pi),则个体的当前的个体历史最优位置pi保持不变;
[0056]
步骤五,对所有个体,将每个个体的当前的个体历史最优位置pi的适应度函数f(pi)值分别与当前的全局历史最优位置pg的适应度函数f(pg)值进行比较,若f(pi)<f(pg),则把该个体的当前的个体历史最优位置pi作为当前的全局历史最优位置pg;若f(pi)≥f(pg),则当前的全局历史最优位置pg保持不变;
[0057]
步骤六,根据步骤五得到的当前的全局历史最优位置pg,判断是否达到终止条件,若当前的全局历史最优位置pg所对应的消磁电流达到预设值,则结束消磁电流的调整,实现消磁电流的优化调整;若前的全局历史最优位置pg所对应的消磁电流未达到预设值,则重复步骤三至步骤六进行迭代计算,直到当前的全局历史最优位置pg所对应的消磁电流达到预设值或达到预设的最大迭代数,结束消磁电流的调整,实现消磁电流的优化调整。
[0058]
参见附图2,所述分布式消磁系统消磁电流优化调整方法的实施流程如下:
[0059]
第一步,设置计算程序参数,计算程序参数设置包括加速度常数c1和c2,最大速度v
max
,群体规模n,个体的维度d,个体的最大调整范围及终止条件;
[0060]
第二步,测量舰船的原始磁场:消磁线圈不工作,在磁东、南、西、北四个航向上测量舰船在左舷、龙骨和右舷下一定深度上的垂向磁场的纵向通过特性,根据公式分别计算出五个量,五个量分别为舰船纵向磁化感应垂直分量、舰船纵向磁化固定垂直分量、舰船横向磁化感应垂直分量、舰船横向磁化固定垂直分量及舰船垂向磁化垂直分量,每个量的数据均按照舰船的左舷的艉部到艏部、龙骨的艉部到艏部及右舷的艉部到艏部的顺序排列,最终五个量的数据形成五组数组;
[0061]
第三步,测量消磁线圈的绕组效率;分别给单个消磁线圈加载5a的电流,测量各测量点上由消磁线圈引起的磁场分布,该磁场减去同航向的舰船原始磁场即为消磁线圈的绕组效率;并且纵向消磁线圈的绕组效率要在磁南或者磁北航向测量,横向消磁线圈的绕组效率要在磁东或者磁西方向测量,垂向消磁线圈的绕组效率可以在磁东、南、西、北航向上测量;每个消磁线圈的绕组效率存储为一列数组,数组元素个数和位置与舰船原始磁场数组元素相同;使用纵向消磁线圈补偿舰船纵向磁化感应垂直分量和舰船纵向磁化固定垂直分量,横向消磁线圈补偿舰船横向磁化感应垂直分量和舰船横向磁化固定垂直分量,垂向消磁线圈补偿舰船垂向磁化垂直分量。
[0062]
第四步,将第二步的舰船的原始磁场和第三步的消磁线圈的绕组效率作为参数输入到程序后,启动程序,程序将自动进行优化迭代计算,直到计算结果满足终止条件后,输出消磁电流的最优化组合,该组合为一列数组,数组中的每一个元素对应一个消磁线圈的消磁电流,将此消磁电流值设置为对应消磁线圈的的实际工作电流,启动消磁系统电源,所有消磁线圈同时上电工作时,消磁线圈的磁场将补偿舰船磁场,使补偿后的舰船剩余磁场峰值误差最小。
[0063]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。