1.本发明涉及一种手术装置,更具体地,本发明涉及一种附接至患者的骨骼以辅助手术过程的手术夹钳。该手术夹钳构造成使得夹持元件显示出在与用于打开及闭合所述夹持元件的致动器的平面不同的平面中运动。因此,手术夹钳在脊柱上进行手术工作时向外科医生提供了更大的工作空间。
背景技术:
2.在患者的骨骼、比如脊柱上进行的手术过程通常需要使用特定的手术装置、比如夹钳以将参考元件或辅助装置固定或保持至要进行干预的骨骼。
3.在一些特定应用中,夹钳附接至预定的椎骨并且包括旨在作为位于多个相机的可观察空间内的参考元件的参考元件。计算机系统接收由多个相机捕获的图像并且适于根据观察到的参考元件的位置确定椎骨的正确位置和取向。
4.在一些其他特定应用中,这些夹钳连接或联接至跟踪系统,使得这些夹钳在手术过程中用作跟踪系统的锚定参考件。
5.常规地,在任何确定的背景中,骨骼夹钳具有用于将夹钳附接至要干预的骨骼的夹钳打开及闭合机构。
6.夹钳装置具有两个夹爪,其中,至少一个夹爪能够相对于另一个夹爪移动。第一夹爪附接至脊柱的一侧,并且另一个夹爪附接至脊柱的相反侧,其中,在夹持过程期间两个夹爪的运动主要根据垂直于脊柱的平面发生。
7.打开及闭合机构基于每个夹爪的由使用者致动的一些延长部,并且因此这些延长部也显示出在与脊柱垂直的相同平面内的运动。
8.即使夹钳的形状非常紧凑,在夹钳的打开位置和闭合位置中,夹钳的形状也要求夹钳的部件中的一些部件、特别是打开机构的延长部在脊柱的任一侧侵入一定空间。
9.外科医生对脊柱的主要动作是在脊柱的一侧,并且因此打开及闭合机构减小了手术的可用空间。
10.因此,在本领域中需要改进的装置,其在手术过程中表现出对患者的骨骼的稳定固定,同时便于这些装置的定位及其固定而不妨碍对患者的脊柱的手术过程。
技术实现要素:
11.本发明通过所要求保护的骨骼夹钳提供了用于前述问题的解决方案。在本发明中,还限定了本发明的优选实施方式。
12.在第一发明方面中,本发明提供了一种骨骼夹钳,包括:
[0013]-主体,该主体在一个端部处包括第一夹爪;
[0014]-第二夹爪,该第二夹爪旋转地连接至主体并且与第一夹爪相对,第二夹爪至少包括打开夹爪位置和闭合夹爪位置,使得第一夹爪和第二夹爪两者限定了抓握部分;以及
[0015]-致动器,该致动器构造成用于打开及闭合第二夹爪,致动器旋转地连接至主体并
且至少包括打开致动器位置和闭合致动器位置,
[0016]
其中,
[0017]
致动器和第二夹爪通过运动链联接,使得致动器从一个致动器位置转至另一致动器位置相应地引起第二夹爪从一个夹爪位置转至另一夹爪位置,并且
[0018]
致动器的旋转运动包含在第一平面中,并且第二夹爪的旋转运动包含在第二平面中,其中,第一平面的取向和第二平面的取向不同。
[0019]
本骨骼夹钳是一种旨在在手术过程中附接至患者的骨骼、比如脊柱的手术夹钳。特别地,该夹钳在患者的骨骼上固定在靠近将要进行手术干预的区域中。该夹钳一旦附接至骨骼就可以用作将要被干预的骨骼的参考部件,使得骨骼夹钳可以连接至手术系统中的基准元件或机械跟踪器以用于手术干预。
[0020]
参考部件必须被解释为以下部件:一旦该部件已经被固定至骨骼,骨骼和参考部件因它们是单个本体而具有运动,并且因此,参考件的运动可以解释为骨骼的主要在骨骼在视觉上无法触及时的运动。
[0021]
骨骼夹钳包括主体,该主体优选地定形状成当夹钳固定至所述骨骼时延伸到患者的骨骼外部的长形杆。主体将被理解为刚性本体。
[0022]
骨骼夹钳还包括两个夹爪,第一夹爪和第二夹爪,第一夹爪和第二夹爪允许将该夹钳固定至患者的骨骼。特别地,第一夹爪被包括在主体上并且位于主体的端部中的一个端部中。第二夹爪是独立于主体的部件,但第二夹爪连接至主体。具体地,第二夹爪靠近主体的放置第一夹爪的端部旋转地连接至主体,使得第二夹爪与第一夹爪相对。该第二夹爪限定了至少两个夹爪位置,打开夹爪位置和闭合夹爪位置。事实上,两个夹爪在其之间相对并且第二夹爪包括提及的两个夹爪位置,第一夹爪和第二夹爪两者限定了骨骼夹钳中的抓握部分。即,夹钳至骨骼的固定设置在抓握部分处并且由于两个夹爪而形成。
[0023]
骨骼夹钳还包括致动器,该致动器用于相对于第一夹爪打开及闭合第二夹爪,即,致动器通过相对于第一夹爪打开及闭合该第二夹爪来控制夹钳的抓握器。该抓握器将被理解为夹钳夹爪例如相对于患者的骨骼表面的附接或粘附。致动器还以可旋转的方式连接至主体以及第二夹爪。即,致动器致动第二夹爪的打开夹爪位置和闭合夹爪位置并且至少包括打开致动器位置和闭合致动器位置。
[0024]
致动器的致动与第二夹爪相对于主体的旋转运动相关联,使得可以调节夹钳的抓握器。特别地,致动器与第二夹爪之间的联接由运动链提供。在这种意义上,致动器从一个致动器位置转至另一致动器位置相应地引起第二夹爪从一个夹爪位置转至另一夹爪位置。另外,致动器相对于主体的旋转运动包含在第一平面中,该第一平面具有与包含第二夹爪相对于主体的旋转运动的第二平面的取向不同的取向。
[0025]
有利地,本发明提供了一种改进的夹钳,该夹钳具有确保在手术干预中与患者的骨骼的固定并且是易于致动的夹钳的构型。此外,本骨骼夹钳便于对将被干预的患者的骨骼进行操纵,因为夹钳致动从不介入手术干预区域的平面执行。
[0026]
在操作方式中,包括第一夹爪和第二夹爪的抓握部分的平面垂直于脊柱,因为这两个夹爪旨在用于夹持棘突。因此,致动器的旋转运动不同于由两个夹爪的运动限定的平面,并且因此致动器不会侵入外科医生的工作空间。
[0027]
根据实施方式,第二平面p2和第一平面p1具有在[60
°
,120
°
]范围内、更优选地在
[70
°
,110
°
]范围内、更优选地在[80
°
,110
°
]范围内的角度。
[0028]
在特定实施方式中,第二平面垂直于第一平面。
[0029]
即,由致动器相对于主体执行的旋转运动垂直于第二夹爪也相对于主体的旋转运动。平面之间的这种垂直构型有利地确保了骨骼夹钳的致动不会介入骨骼的根据最佳条件固定夹钳的手术干预区域。
[0030]
在特定实施方式中,运动链部分地容置在主体内,致动器在主体的第一关节中枢转,并且第二夹爪借助于致动器的旋转在主体的第二关节中枢转,第二关节与第一关节分开。
[0031]
根据优选实施方式,主体是中空本体以用于允许容置将致动器联接至第二夹爪的运动链的一部分。致动器在主体的第一关节中枢转并且第二夹爪在主体的第二关节中枢转,该第二关节与第一关节分开。第一关节和第二关节这两者形成运动链的一部分。从这种意义上说,致动器在主体的第一关节中的旋转引起第二夹爪在主体的第二关节中的旋转。即,第二夹爪的旋转是致动器旋转的结果,而第一夹爪保持固定,因为第一夹爪是刚性主体的一部分。
[0032]
在特定实施方式中,运动链包括:
[0033]-滑动件;以及
[0034]-第一杆曲柄和第二杆曲柄,
[0035]
其中,运动链适于借助于以可旋转的方式连接致动器和滑动件的第一杆曲柄将致动器的旋转运动转换为滑动件的线性移位,并且随后借助于以可旋转的方式连接滑动件和第二夹爪的第二杆曲柄将滑动件的线性移位转换为第二夹爪的旋转运动。
[0036]
为了通过致动器的旋转运动引起第二夹爪的旋转运动,运动链借助于滑动件和两个杆曲柄将致动器的旋转运动转换为第二夹爪的旋转运动。特别地,运动链包括第一杆曲柄,该第一杆曲柄以可旋转的方式连接致动器和滑动件,使得该第一杆曲柄将致动器的旋转运动转换为滑动件的线性移位。此外,运动链包括第二杆曲柄,该第二杆曲柄以可旋转的方式连接滑动件和第二夹爪,使得该第二杆曲柄将滑动件的由第一杆曲柄引起的线性移位转换为第二夹爪的旋转运动。第二杆曲柄的致动在第一杆曲柄的致动之后,并且滑动件被迫获得线性运动,因为滑动件在主体内部被导引。有利地,运动链借助于运动的转换促进了骨骼夹钳中的致动器与第二夹爪之间的运动传递。
[0037]
在更特别的实施方式中,当骨骼夹钳处于操作模式中时,第一杆曲柄运动处于第一平面中,并且在操作模式中,第二杆曲柄运动处于第二平面中。
[0038]
根据该特定实施方式,滑动件是允许根据两个不同的运动平面组合两个不同取向的元件,因为线性移位不依赖于任何取向。
[0039]
更特别地,致动器借助于使致动器延伸至致动器旋转所围绕的第一关节的相对侧的延伸臂而连接至第一杆曲柄,使得致动器的打开引起第二夹爪打开。
[0040]
该延伸臂是运动链的一部分并且是致动器从主体的第一关节至该第一关节的相对侧的延伸部,致动器在该第一关节处枢转,该相对侧连接至第一杆曲柄。这种构型将致动器的打开转换为第二夹爪相对于主体的打开。
[0041]
在另一特定实施方式中,致动器直接连接至第一杆曲柄,使得致动器的打开引起第二夹爪闭合。
[0042]
这种构型将致动器的打开转换为第二夹爪相对于主体的闭合。
[0043]
在特定实施方式中,骨骼夹钳还包括致动器运动调节机构,该致动器运动调节机构包括致动器固定的锁定位置和致动器可以旋转的自由位置。
[0044]
该机构调节致动器的旋转运动,使得能够固定致动器并允许致动器的旋转。当致动器固定且无法旋转时,该机构处于锁定位置,而当然后致动器可以旋转时,该机构处于自由位置。有利地,该致动器运动调节机构允许借助于第二夹爪旋转来控制夹钳的抓握器。
[0045]
在更具体的实施方式中,致动器运动调节机构是棘轮机构并且至少包括:
[0046]-弧形齿条,该弧形齿条从主体突出并且包括多个齿,以及
[0047]-掣爪,该掣爪旋转地连接至致动器并且至少包括与弧形齿条的那些齿相匹配的齿,
[0048]
其中
[0049]
在机构的自由位置中,掣爪构造成相对于致动器旋转并且滑过弧形齿条,从而允许致动器相对于弧形齿条旋转,并且
[0050]
在锁定位置中,掣爪运动保持受阻,使得致动器保持固定。
[0051]
该机构理解为棘轮机构并且包括弧形齿条和掣爪。根据实施方式,该弧形齿条是从主体突出并且与包含致动器的旋转运动的第一平面平行的圆形齿条。弧形齿条在其上部分中包括具有多个齿的齿形表面。掣爪旋转地连接至致动器并且至少包括齿,该齿适于配合弧形齿条的齿表面并锁定到弧形齿条的齿表面中。
[0052]
当机构处于自由位置时,掣爪相对于致动器旋转并且滑过弧形齿条,使得致动器沿着该齿条的齿表面相对于弧形齿条旋转。另一方面,当机构处于锁定位置时,掣爪的运动受阻并且致动器保持固定。
[0053]
在更具体的实施方式中,棘轮机构还包括弹簧元件,该弹簧元件附接至致动器并且布置成向掣爪施加力,从而确保掣爪的齿与弧形齿条的齿接触。
[0054]
掣爪构造成一旦掣爪接合到齿表面中就保持锁定位置;尽管如此,根据该实施方式,弹簧元件确保用于确保接触的力,并且因此该构型降低了与锁定机构的安全级别相关联的不确定性。
[0055]
在另一特定实施方式中,棘轮机构还包括安全手柄,该安全手柄从致动器突出并且构造成将掣爪的运动锁定在机构的锁定位置中。
[0056]
该手柄确保将掣爪的运动阻挡在机构的锁定位置中。
[0057]
在特定实施方式中,夹钳还包括在与第一钳夹相反的端部处连接至主体的运动联接件,该运动联接件构造成联接至追踪装置,使得骨骼夹钳提供锚定参考件。
[0058]
主体的端部中的该运动联接件将骨骼夹钳附接至外部元件(比如基准元件或机械追踪器)并允许骨骼夹钳成为追踪装置的锚定参考件,因为该运动联接件确保运动联接件的运动是骨骼的运动,就像两个本体是同一本体。
[0059]
在更具体的实施方式中,运动联接件包括:
[0060]-凹形部分,该凹形部分包括铁磁元件,以及
[0061]-凸形部分,该凸形部分至少包括磁体,
[0062]
其中,铁磁元件和至少磁体提供凹形部分与凸形部分两者之间的结合力。
[0063]
如已经提到的,运动联接件适于将本骨骼夹钳连接至基准元件或者机械追踪器。
无论哪种方式,包括在运动联接件中的凹形部分和凸形部分均由相同的元件组成。特别地,由于凹形部分的铁磁元件和凸形部分的磁体,运动联接件相应地提供凹形部分和凸形部分之间的结合力。
[0064]
在更具体的实施方式中,凹形部分还包括形成至少六个平面的三个凹槽,并且凸形部分还包括三个球体或半球体和一组磁体。凸形部分的这些球体构造成与凹形部分的凹槽匹配,从而提供独特的匹配位置和取向。凸部的每个球体与由凹形部分的凹槽形成的两个平面接触,使得运动联接件提供六个接触力。这种接触力有利地确保了凹形部分与凸形部分之间没有松动的独特联接,并且凹形部分的铁磁元件和凸形部分的磁体确保了运动联接件中两个部分之间的结合力。
[0065]
另外,凹形部分的整体轮廓包括适合于在运动联接件中简化手动联接操作的壁架,并且凸形部分的整体轮廓包括构造成装配到壁架中以进一步确保运动联接件的两个部分之间的正确联接的开口。
[0066]
在特定实施方式中,第一夹爪和第二夹爪包括多个尖状物,使得在闭合夹爪位置中,第一夹爪和第二夹爪两者的尖状物彼此面对。
[0067]
在两个夹爪中提供尖状物改善了抓握并且确保夹钳固定至患者的骨骼,因为尖状物被驱动到骨骼中以改善固定。
附图说明
[0068]
参照附图从仅通过说明性和非限制性示例提供的优选实施方式的以下详细描述中将更清楚地看出本发明的这些和其他特征和优点。
[0069]
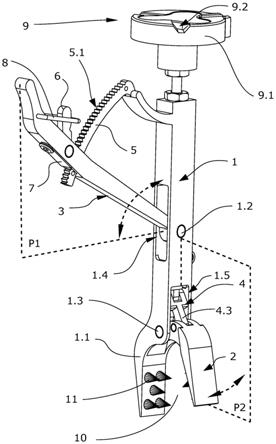
图1:该图示出了根据本发明的实施方式的骨骼夹钳处于第一位置的立体图。
[0070]
图2:该图示出了根据本发明的实施方式的骨骼夹钳处于第二位置的立体图。
[0071]
图3:该图示出了根据本发明的实施方式的骨骼夹钳处于第三位置的立体图。
[0072]
图4:该图示出了根据本发明的实施方式的骨骼夹钳的可移动部分处于第一位置的立体图。
[0073]
图5:该图示出了根据本发明的实施方式的图4的可移动部分处于第二位置。
具体实施方式
[0074]
图1至图3示出了处于不同位置的本骨骼夹钳的实施方式。该骨骼夹钳包括作为长形结构的主体1,该长形结构至少在本体的一部分的内部是中空的。主体1包括在其端部中的一个端部处的第一夹爪1.1,该第一夹爪1.1的表面上布置有多个尖状物11。
[0075]
骨骼夹钳还包括第二夹爪2,该第二夹爪2在将被识别为第二关节1.3的关节处旋转地连接至主体1并且与第一夹爪1.1相对。该第二夹爪2还包括在该第二夹爪2的表面上的多个尖状物11,使得第二夹爪2的尖状物11面对第一夹爪1.1的尖状物11。
[0076]
第二夹爪2至少包括打开夹爪位置和闭合夹爪位置,其中,第一夹爪1.1和第二夹爪2两者限定抓握部分10。打开夹爪位置相比于闭合夹爪位置在抓握部分10中限定了更大的孔口。当第二夹爪2处于其闭合夹爪位置时,第一夹爪1.1和第二夹爪2两者意在夹持患者的骨骼。
[0077]
另外,骨骼夹钳包括致动器3,该致动器3构造成用于通过移动第二夹爪2、即通过
该第二夹爪2相对于主体1在第二关节1.3处的旋转来打开和闭合抓握部分10。致动器3在第一关节1.2处旋转地连接至主体1,该第一关节1.2沿着所述主体1与第二关节1.3分开。此外,致动器3至少包括打开致动器位置和闭合致动器位置。
[0078]
致动器3和第二夹爪2通过部分容纳在主体1内的运动链4联接。该运动链4使得致动器3从一个致动器位置转至另一致动器位置能够相应地导致第二夹爪2从一个夹爪位置转至另一夹爪位置。
[0079]
具体地,图1示出了骨骼夹钳,其中第二夹爪2由处于其打开致动器位置的致动器3致动而处于打开夹爪位置。另一方面,图3示出了骨骼夹钳,其中第二夹爪2由处于其闭合致动器位置的致动器3致动而处于闭合夹爪位置。特别地,图2示出了骨骼夹钳的处于图1的位置与图3的位置以及图3的位置与图1的位置之间的过渡位置。
[0080]
因此,运动链4负责将致动器3的旋转运动转换成第二夹爪2的旋转运动,以相对于第一夹爪1.1打开或闭合该第二夹爪2。特别地,致动器3的旋转运动包含在第一平面p1中,该第一平面p1与包含第二夹爪2的旋转运动的第二平面p2不同,即这些第一平面p1和第二平面p2的取向在第一平面与第二平面之间是不同的。在图1至图3上所示的特定示例中,这些第一平面p1和第二平面p2在第一平面与第二平面之间正交。作为这种正交情况的结果,由于第一关节1.2和第二关节1.3呈分别允许致动器3和第二夹爪2的旋转的轴的形式,因此所述轴的轴线也是正交的。第一平面p1和第二平面p2连同使用虚线指示运动的双箭头仅在图1中示意性地示出,以便为了清楚起见避免过多的线靠近其他相关元件。
[0081]
根据该具体实施方式,致动器3在第一关节1.2处在主体1内部枢转并且部分地容纳在主体1内,使得致动器3通过第一开口1.4穿过主体1。另一方面,第二夹爪2在第二关节1.3处在主体1内部枢转并且通过主体1中的第二开口1.5部分地容纳在主体1内。该第二开口1.5布置在主体1的与第一开口1.4所位于的侧面垂直的侧面中。
[0082]
主体1还包括第三开口(图中未示出),该第三开口布置在主体1的与第一开口1.4所位于的侧面相反并且与第二开口1.5所位于的侧面垂直的侧面中。该第三开口允许运动链4的一部分在需要时朝向主体1的外部突出。
[0083]
运动链4将致动器3在第一平面p1中执行的旋转运动转换成第二夹爪2在第二平面p2中执行的旋转运动。致动器3和第二夹爪2的旋转运动两者分别在不同的关节点中相对于主体1进行。
[0084]
图1至图3中所示的本骨骼夹钳还包括用于调节致动器3的运动的机构。该致动器运动调节机构限定了使致动器3固定在其中一个位置中的锁定位置和使致动器3可以相对于主体1在第一关节点1.2上旋转的自由位置。
[0085]
特别地,该机构为棘轮机构,该棘轮机构一方面包括弧形齿条5和掣爪6。弧形齿条5是从主体1突出并形成该主体1的一部分的圆形齿条。弧形齿条5包括沿着该齿条5的上表面的多个齿。根据该实施方式,致动器3被穿孔以限定出弧形齿条5穿过的孔。掣爪6旋转地连接至致动器3并且至少包括与弧形齿条5的这些齿5.1相匹配的齿。
[0086]
当棘轮机构处于其自由位置中时,掣爪6可以相对于致动器3转动,以滑过弧形齿条5的圆形部分,从而允许致动器3转动。特别地,棘轮机构还包括弹簧元件7,该弹簧元件7附接至致动器3并且适于向掣爪6施加力以确保掣爪6的齿与弧形齿条5的齿5.1的接触。在示例中,弹簧元件7是能够弹性变形的平坦金属件,该平坦金属件优选地通过使用由螺钉附
接至致动器3的薄板形成。该弹簧元件7是活动(flexible)的。
[0087]
另一方面,当棘轮机构处于其锁定位置中时,掣爪6的运动借助于从致动器3突出的安全手柄8保持受阻,使得致动器3保持固定在致动器位置处。
[0088]
在这个意义上,图1至图3示出了致动器3相对于圆形齿条5的不同位置。在图1和图3中,棘轮机构处于保持致动器3分别固定在打开位置和闭合位置中的锁定位置,而在图2中,棘轮机构处于允许致动器3旋转的自由位置。图1和图3均示出了对掣爪6进行保持的安全手柄8,该安全手柄用于确保致动器3的固定并避免掣爪6的齿沿着弧形齿条5的齿5.1滑动。然而,图2示出了安全手柄8如何不对掣爪6进行保持并且允许致动器3沿着圆形齿条5的运动。
[0089]
根据该实施方式,掣爪6示出了适于在锁定位置中接纳安全手柄的凹部。
[0090]
图1至图3中所示的骨骼夹钳还包括连接在主体1的与第一夹爪1.1所位于的端部相反的端部中的运动联接件9。该运动联接件9构造成联接至追踪装置,使得骨骼夹钳提供锚定参考件。具体地,运动联接件9包括凹形部分9.1和凸形部分(未示出)。凹形部分9.1包括附接至位于凸形部分上的磁体的铁磁元件。以这种方式,凹形部分9.1的铁磁元件和凸形部分的磁体两者提供凹形部分与凸形部分之间的结合力。
[0091]
根据另一实施方式,铁磁元件在凸形部分中并且磁体在凹形部分9.1中,以确保所述凹形部分与凸形部分之间的结合力。
[0092]
在图1至图3中所示的示例中,运动联接件9的凹形部分9.1具有三个机加工凹槽9.2,凹槽9.2形成至少六个斜面,其适用于接纳三个球体或半球体,包括在凸形部分(未示出)中。该凸形部分具有沿其分布的一组磁体,该磁体用于与凹形部分9.1的铁磁元件接触。特别地,凸形部分的这些球体以独特的位置和取向与凹形部分9.1的凹槽9.2匹配。因此,每个球体与凹形部分9.1的两个倾斜平面接触,以通过六个接触点提供三个位置,从而确保运动联接件9中的独特联接。凹形部分9.1的铁磁元件和凸形部分的磁体确保运动联接件9的两个位置之间的结合力。
[0093]
图1至图3中所示的骨骼夹钳的运动链4在图4和图5中详细地示出。这些图4和图5示出了致动器3、运动链4与第二夹爪2之间的万向节,而没有示出会隐藏一些内部部件的主体1,以便详细观察运动链4的构型。这些图中所示的运动链4包括滑动件4.1和两个杆曲柄4.2、4.3。
[0094]
在这些图4和图5中,致动器3借助于延伸臂3.1连接至第一杆曲柄4.2,该延伸臂3.1使致动器3在致动器3绕着旋转的第一关节1.2的相反侧部处延伸,使得致动器3的打开导致第二夹爪2打开。第一杆曲柄4.2以可旋转的方式连接致动器3和滑动件4.1。在另一示例中,致动器3可以直接连接至第一杆曲柄4.2而不是使用延伸臂3.1连接至第一杆曲柄4.2,使得致动器3的打开导致第二夹爪2闭合。
[0095]
第二夹爪2连接至第二杆曲柄4.3,该第二杆曲柄4.3以可旋转的方式连接至滑动件4.1和该第二夹爪2。
[0096]
在操作模式中,运动链4的第一杆曲柄4.2的运动处于包含致动器3的旋转运动的第一平面p1中。此外,在操作模式中,第二杆曲柄4.3的运动处于包含第二夹爪2的旋转运动的第二平面p2中。
[0097]
按照性能顺序,致动器3在第一关节1.2中的旋转运动借助于第一杆曲柄4.2转换
成滑动件4.1的线性移位,并且随后,滑动件4.1的线性移位借助于第二杆曲柄4.3转换成第二夹爪2在第二关节1.3中的旋转运动。因此,运动链4通过致动器3的致动提供第二夹爪2的致动。
[0098]
滑动件4.1容纳在主体1中,其中,壳体的形状构造成用于滑动件4.1的线性运动的线性引导件。
[0099]
图4具体示出了当骨骼夹钳处于图1中所示的位置时运动链4的部件的位置。相比之下,图5示出了当骨骼夹钳处于图3中所示的位置时运动链4的部件的位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
