1.本发明涉及一种用于估计源自于打齿音的噪声的产生的噪声估计装置和车辆用控制装置。
背景技术:
2.在日本特开2008-265615中公开了一种车辆的控制装置,其在起动内燃机之前使电动机动作,以在动力传递的路径上堵塞相互啮合的齿轮间的间隙。通过预先堵塞齿轮间的间隙,从而抑制在从停车状态起动内燃机时产生打齿音。
技术实现要素:
3.打齿音不仅限于在起动内燃机时产生。例如,在车辆的行驶中也产生打齿音。存在也想要抑制由像这样在车辆的行驶中产生的打齿音引起的噪声的需求。为了抑制由在车辆的行驶中产生的打齿音引起的噪声,需要估计车辆的运转状态是否是容易产生源自打齿音的噪声的状态。
4.本发明的手段及其作用效果。
5.噪声估计装置应用于具备动力源和用于传递通过该动力源的驱动而输出的动力的动力传递机构的车辆,所述噪声估计装置具备执行装置和存储装置,在所述存储装置中存储有映射数据,该映射数据为用于规定通过机器学习而学习完毕的映射的数据,在所述映射中,当作为输入变量而被输入与所述动力源的输出相关的变量和表示所述动力传递机构的状态的变量时,作为输出变量而输出表示与噪声相关的感官水平的变量,该噪声是由于所述动力传递机构工作而产生的打齿音被传递到车辆的驾驶室所导致的,所述执行装置执行:获取处理,获取与所述动力源的输出相关的变量和表示所述动力传递机构的状态的变量作为所述输入变量的值;以及估计处理,根据通过向所述映射输入所述输入变量的值而由该映射输出的输出变量的值,估计所述感官水平。
6.根据上述结构,通过将与动力源的输出相关的变量以及表示动力传递机构的状态的变量输入到映射,输出表示感官水平的变量。即,能够基于与动力源的输出相关的变量以及表示动力传递机构的状态的变量来估计感官水平。需要说明的是,感官水平是表示车辆的乘员对声音感到不快的程度的指标值。感官水平越高,表示乘员越容易对噪声感觉不快。通过如上所述地估计感官水平,能够估计是否是容易产生源自打齿音的噪声的状态。
7.所述动力源包括内燃机,所述动力传递机构包括变速装置,与所述动力源的输出相关的变量包括起动所述内燃机之前的曲柄角、内燃机转速以及内燃机负荷中的一个以上的参数,表示所述动力传递机构的状态的变量包括所述变速装置的齿轮比、向所述变速装置供给的工作油的温度以及是否为所述变速装置中的旋转轴的旋转被固定的状态中的一个以上的参数。
8.根据上述结构,能够考虑起动内燃机之前的曲柄角、内燃机转速以及内燃机负荷中的一个以上的参数来估计噪声的大小。该参数与产生打齿音的外力有关。通过考虑产生
打齿音的外力,能够提高车辆室内的噪声大小的估计精度。
9.进而,根据上述结构,能够考虑齿轮比、工作油的温度以及是否是变速装置中的旋转轴的旋转被固定的状态中的一个以上的参数而估计噪声的大小。该参数与施加了产生打齿音的外力的情况下的打齿音的产生容易度有关。通过考虑打齿音的产生容易度,能够提高车辆室内的噪声大小的估计精度。
10.所述动力源包括电动发电机,与所述动力源的输出相关的变量包括所述电动发电机的控制量中的、为了抑制通过驱动所述内燃机而产生的振动而计算出的减振控制量。
11.根据上述结构,能够考虑由通过减振控制量调整的电动发电机输出的转矩来估计噪声的大小。由此,能够提高估计车辆的室内的噪声的大小的精度。
12.在所述输入变量中包括与相对于源自所述打齿音的噪声的背景噪声相关的变量,与所述背景噪声相关的变量中包括车速、内燃机转速以及车辆所具备的窗的开闭状态中的一个以上的参数。
13.根据上述结构,能够考虑可能产生背景噪声的参数来估计源自打齿音的噪声的大小。由此,能够提高估计车辆的室内的噪声的大小的精度。
14.表示所述感官水平的变量包括突出量,该突出量是表示所述驾驶室中的噪声的声压与相对于源自所述打齿音的噪声的背景噪声的声压之差的值。
15.根据上述结构,作为表示感官水平的变量,能够计算驾驶室中的噪声的声压与背景噪声的声压之差即突出量。由此,能够估计与背景噪声进行比较的车厢中的噪声的大小。
16.车辆用控制装置具备上述噪声估计装置中的所述执行装置和所述存储装置,所述动力源包括内燃机和电动发电机,在所述感官水平为规定值以上时,所述执行装置执行使所述打齿音降低的抑制控制,在所述抑制控制中,进行禁止所述内燃机的起动的处理或者减小内燃机负荷的处理。
17.根据上述结构,在估计的噪声较大的情况下,能够以降低打齿音的方式控制内燃机。由此,能够降低在车辆的室内产生的噪声。
附图说明
18.下面将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,在附图中,相同的附图标记显示相同的元件,其中:
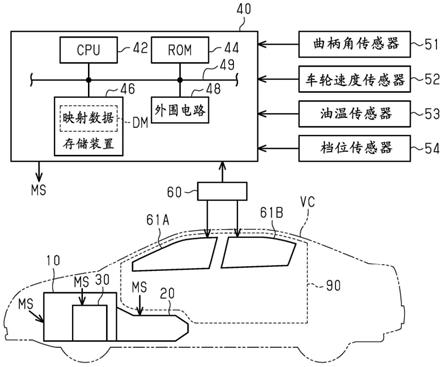
19.图1是表示车辆和控制装置的一实施方式的示意图。
20.图2是表示该实施方式的控制装置所执行的处理的步骤的流程图。
21.图3是说明与背景噪声进行比较的噪声的突出量的图。
具体实施方式
22.以下,参照图1~图3,对噪声估计装置和车辆用控制装置的一实施方式进行说明。
23.图1表示搭载有内燃机10作为动力源的车辆vc。车辆vc也可以具备电动发电机30作为动力源。对电动发电机30的端子施加逆变器的输出电压。车辆vc也可以具备多个电动发电机。
24.车辆vc具备构成动力传递机构的变速装置20。变速装置20具备旋转轴。变速装置20的旋转轴传递通过动力源的驱动而输出的动力。作为一个例子,变速装置20由旋转轴和
齿轮构成。在变速装置20中,能够切换多个齿轮比。变速装置20根据齿轮比变换并传递动力源的旋转。
25.变速装置20也可以具备驻车锁定机构。驻车锁定机构例如在通过能够由车辆vc的驾驶员进行操作的变速杆而选择了p档的情况下工作。p档也可以通过驻车开关选择。驻车锁定机构是机械地阻止变速装置20的旋转轴的旋转的机构。驻车锁定机构通过电动致动器而工作。在驻车锁定机构的具体的结构的一个例子中,若驻车锁定机构工作,则锁定构件移动。锁定构件移动到与齿轮啮合的位置,该齿轮与旋转轴联动地旋转。通过锁定构件与齿轮啮合而限制齿轮的旋转。即,当选择p档而驻车锁定机构工作时,变速装置20的旋转轴被固定。因此,选择了p档的情况下的变速装置20的扭转特性与未选择p档的情况下的变速装置20的扭转特性不同。
26.车辆vc也可以具备构成动力传递机构的动力分割装置。动力分割装置能够分割内燃机10和电动发电机的动力。动力分割装置具备行星齿轮机构。动力分割装置与内燃机10的曲轴机械地连结。行星齿轮机构的行星架与内燃机10的曲轴机械地连结。行星齿轮机构的太阳轮与电动发电机30的旋转轴机械地连结。车辆的驱动轮经由变速装置20机械地连结在行星齿轮机构的齿圈。
27.在车辆vc中将从动力源到车轮以机械方式连结的机构可以说是动力传递机构。例如,差速齿轮和驱动轴也是动力传递机构。
28.车辆vc也可以具备油泵。油泵的从动轴与动力分割装置中的行星齿轮机构的行星架机械地连结。油泵是将机油盘内的油作为工作油向变速装置20内的液压控制回路排出的泵。
29.如图1所示,车辆vc具备驾驶室90。驾驶室90构成车辆vc的乘员能够乘入的车厢。驾驶室90中收纳有座位。驾驶室90由构成车辆vc的内饰的面板等划分。在车辆vc中,收纳内燃机10的舱室位于比驾驶室90靠车辆前方的位置。
30.车辆vc也可以具备能够开闭的窗。在图1中,作为车辆vc所具备的窗的一个例子,示出第1窗61a和第2窗61b。第1窗61a安装于前门。第2窗61b安装于后门。在车辆vc所具备的窗中的一个以上的窗打开的情况下,驾驶室90经由打开的窗而开放。
31.车辆vc也可以具备控制窗的开闭的电动车窗控制装置60。电动车窗控制装置60例如安装于车辆vc的车门。电动车窗控制装置60具备操作开关。操作开关安装于能够由车辆vc的乘员进行操作的位置。操作开关由与车辆vc所具备的各窗相对应的多个开关构成。电动车窗控制装置60具备控制部。控制部具备根据操作开关的状态发送用于开闭窗的信号的功能。例如,电动车窗控制装置60能够开闭第1窗61a或者第2窗61b。
32.车辆vc具备各种传感器。在图1中,作为各种传感器的一个例子,示出曲柄角传感器51、车轮速度传感器52、油温传感器53以及档位传感器54。曲柄角传感器51能够检测曲轴的旋转角。车轮速度传感器52与车辆vc所具备的各车轮相对应地安装。车轮速度传感器52能够检测各车轮的车轮速度。油温传感器53能够检测向变速装置20供给的工作油的温度。档位传感器54能够检测由变速杆或者驻车开关操作的档位。来自各种传感器的检测信号向车辆所具备的控制装置40输入。
33.车辆vc具备控制装置40。控制装置40将内燃机10作为控制对象。控制装置40操作内燃机10的各种操作部,以控制作为内燃机10的控制量的转矩和排气成分比率等。另外,控
制装置40也能够以电动发电机30为控制对象。控制装置40操作逆变器,以控制作为电动发电机30的控制量的转矩和旋转速度等。控制装置40也能够以变速装置20为控制对象。通过操作变速装置20内的液压控制回路,调整工作油的压力而控制变速装置20。另外,控制装置40也能够使变速装置20所具备的驻车锁定机构工作。需要说明的是,在图1中,将控制装置40为了操作内燃机10、电动发电机30的逆变器以及变速装置20而发送的信号表示为操作信号ms。
34.控制装置40具备cpu42、rom44、作为能够电改写的非易失性存储器的存储装置46以及外围电路48。cpu42、rom44、存储装置46以及外围电路48能够经由局域网49进行通信。外围电路48的一个例子包括生成用于规定内部动作的时钟信号的电路、电源电路以及复位电路等电路。控制装置40通过cpu42执行存储于rom44的程序来控制上述控制量。
35.控制装置40参照各种传感器输出的信号。控制装置40参照曲柄角传感器51的输出信号。控制装置40基于曲柄角传感器51的输出信号计算内燃机转速。控制装置40参照车轮速度传感器52的输出信号。控制装置40基于车轮速度传感器52的输出信号计算车速作为车辆vc的速度。控制装置40参照油温传感器53的输出信号。控制装置40基于油温传感器53的输出信号计算工作油的温度。控制装置40参照由档位传感器54检测到的档位。
36.控制装置40能够参照电动车窗控制装置60的控制部发送的信号。控制装置40能够基于该信号获取窗的开闭状态。
37.在控制装置40的存储装置46存储有映射数据dm,该映射数据dm是规定通过机器学习而学习完毕的映射的数据。在估计感官水平的处理中使用映射数据dm。映射数据dm和感官水平的详细情况将后述。
38.对由控制装置40执行的处理的一部分进行说明。这些处理通过cpu42执行存储于rom44的程序而实现。
39.控制装置40执行驱动转矩设定处理。驱动转矩设定处理是用于计算驱动转矩指令值trq*的处理,该驱动转矩指令值trq*是应赋予驱动轮的转矩的指令值。以车辆vc所具备的加速器操作构件的操作量作为输入,该操作量越大,则驱动转矩指令值trq*被计算为越大的值。
40.控制装置40能够执行减振处理。减振处理是通过控制电动发电机30来抑制由内燃机10的驱动产生的振动的处理。在减振处理中,控制装置40计算减振控制量作为电动发电机30的控制量。减振控制量的一个例子是用于调整电动发电机30的转矩的增益。减振控制量也可以是表示使电动发电机30的转矩变动的大小的修正值。
41.控制装置40执行估计处理。估计处理是估计与噪声相关的感官水平的处理。感官水平与由于变速装置20工作而产生的打齿音传递到驾驶室90而导致的噪声相关。感官水平是表示车辆vc的乘员对声音感到不快的程度的指标值。感官水平越高,表示乘员越容易对噪声感觉不快。以下,对控制装置40执行估计处理的处理的流程进行说明。
42.需要说明的是,打齿音并不仅限于由于齿轮彼此间碰撞而产生的声音。作为打齿音的一个例子,有时会在花键轴插入花键轴孔的部分产生。作为打齿音的一个例子,有时会在通过滑动配合而将构件彼此间相连的部分产生。作为打齿音的一个例子,有时由于致动器所采用的作动缸与安装于作动缸内的摩擦件之间存在间隙而产生。作为打齿音的一个例子,有时由于轮毂与安装于轮毂的摩擦件之间存在间隙而产生。例如,轮毂是离合器所采用
的离合器毂。
43.在图2中示出控制装置40所执行的处理的步骤。图2所示的处理通过cpu42例如以预定周期反复执行存储于rom44的程序而实现。需要说明的是,在以下,利用开头附加有“s”的数字表示各处理的步骤编号。
44.在图2所示的一系列处理中,cpu42首先获取用于估计感官水平的特征量(s101)。cpu42获取外力f1作为特征量。cpu42获取产生灵敏度f2作为特征量。cpu42也可以获取背景噪声f3作为特征量。
45.对作为第1特征量的外力f1进行说明。作为外力f1,采用与动力源的输出相关的值。换言之,外力f1是作为作用于打齿音的产生部位而使得产生打齿音的外力的指标的值。cpu42能够获取内燃机转速作为外力f1。cpu42也能够获取除内燃机转速之外的参数作为外力f1。将能够获取为外力f1的参数的一个组设为第1参数组。第1参数组除内燃机转速之外,还可以包括起动内燃机10之前的时刻的曲柄角。第1参数组也可以包括内燃机10的内燃机负荷。第1参数组也可以包括内燃机10的点火正时的延迟量。第1参数组也可以包括与电动发电机30相关的机械时间常数。第1参数组也可以包括电动发电机30的减振控制量。
46.对作为第2特征量的产生灵敏度f2进行说明。作为产生灵敏度f2采用表示动力传递机构的状态的值。换言之,产生灵敏度f2是作为外力作用于动力传递机构时的打齿音的产生容易度的指标的值。cpu42能够获取变速装置20的齿轮比作为产生灵敏度f2。cpu42也能够获取除齿轮比之外的参数作为产生灵敏度f2。将能够获取为产生灵敏度f2的参数的一个组设为第2参数组。第2参数组除了齿轮比之外,还可以包括工作油的温度。第2参数组也可以包括表示档位是否为p档的值。
47.对作为第3特征量的背景噪声f3进行说明。作为背景噪声f3,采用作为能够在驾驶室90中观测到的噪声中的、由除打齿音之外的声音引起的噪声的指标的值。换言之,背景噪声f3是与相对于源自打齿音的噪声的背景噪声相关的值。cpu42能够获取车速作为背景噪声f3。cpu42还能够获取除车速之外的参数作为背景噪声f3。将能够获取为背景噪声f3的参数的一个组作为第3参数组。第3参数组除车速之外,还可以包括内燃机转速。第3参数组也可以包括表示车辆vc的窗的开闭状态的值。窗的开闭状态也可以包括表示打开的窗所安装的位置的信息。
48.在此,使用图3,对传递至驾驶室90的噪声与背景噪声的关系进行说明。在图3中,用实线表示能够在驾驶室90中观测到的噪声nz。噪声nz例如能够利用配置于驾驶室90的噪声计来测定。噪声计也可以配置于车辆vc的室外。在用于收集乘员的声音的麦克风安装于驾驶室90的情况下,也能够利用麦克风来测定噪声nz。另外,在图3中,用双点划线表示作为比较例的比较音bg。比较音bg表示相对于噪声nz假定为未产生打齿音的情况下的声压。比较音bg相当于相对于源自打齿音的噪声的背景噪声。比较音bg例如包括路面噪声,该路面噪声为因行驶的车辆vc的轮胎与路面的摩擦或者碰撞而产生的噪声。另外,例如,比较音bg包括发动机噪声,发动机噪声为从运转中的内燃机10产生的噪声。另外,例如,比较音bg包括作为在车辆vc的外部产生的噪声的外部噪声。若产生打齿音,则如图3所示,产生噪声nz的声压比比较音bg的声压大的期间。在噪声nz比比较音bg大的期间,产生打齿音,源自打齿音的噪声被传递至驾驶室90。以下,将在比较噪声nz与比较音bg的情况下噪声nz的声压比比较音bg的声压大的量称为突出量。另外,将噪声nz的一个峰值数为一次突出。在图3所示
的例子中,突出次数为四次。
49.回到图2,接下来,cpu42将通过s101的处理获取到的数据代入到向由存储于图1所示的存储装置46的映射数据dm规定的映射输入的输入变量x(1)~x(3)(s102)。更详细而言,cpu42将外力f1代入到输入变量x(1)。cpu42将产生灵敏度f2代入到输入变量x(2)。cpu42将背景噪声f3代入到输入变量x(3)。
50.接下来,cpu42通过将输入变量x(1)~x(3)的值代入到上述映射,计算作为表示感官水平的变量的输出变量y(1)、y(2)的值(s103)。
51.输出变量y(1)表示突出量。例如,将规定期间内的突出量的最大值设为输出变量y(1)。输出变量y(2)表示噪声nz比比较音bg大的次数。例如,将从第一次观察到声压的突出的时刻到经过规定期间为止的突出的次数设为输出变量y(2)。需要说明的是,输出变量y(1)也可以是从第一次观察到突出的时刻到经过规定期间为止的突出量的平均值。
52.在本实施方式中,作为映射,例示函数近似器,详细而言,例示中间层为1层的全连接正向传播型的神经网络。具体而言,利用由系数wfjk(j=1~m,k=0~3)规定的线形映射对通过s103的处理代入了值的输入变量x(1)~x(3)和作为偏置参数的x(0)进行变换。将通过由系数wfjk规定的线形映射进行变换后的“m”个值分别带入到激活函数f。由此,确定中间层的节点的值。另外,通过由系数wsij(i=1~2)规定的线形映射对中间层中的节点的各个值进行变换。通过将变换后的中间层中的节点的值分别带入到激活函数g,确定输出变量y(1)、y(2)的值。激活函数f的一个例子是双曲正切。激活函数g的一个例子是双曲正切。
53.对映射数据dm进行说明。映射数据dm是预先学习好的学习完毕模型。映射数据dm的学习使用训练数据来进行。训练数据是根据选择为外力f1的参数、选择为产生灵敏度f2的参数以及选择为背景噪声f3的参数而生成的。在映射数据dm的一个例子中,在学习中使用将与内燃机转速、齿轮比以及车速相关的数据和表示相对于内燃机转速、齿轮比以及车速的实际的感官水平的数据作为一个组的训练数据。例如,实际的感官水平通过配置于驾驶室90的噪声计进行测定来获取。训练数据能够通过获取与获取作为感官水平的突出量和突出的次数的时刻相同时刻的内燃机转速、齿轮比以及车速来生成。
54.回到图2,cpu42基于输出变量y(1)、y(2)的值评价感官水平(s104)。感官水平和突出量具有突出量越大则感官水平越高的关系。感官水平和突出次数具有突出次数越多则感官水平越高的关系。对评价感官水平的构成的一个例子进行说明。例如,cpu42判定输出变量y(1)的值是否为规定的第1阈值以上。而且,cpu42判定输出变量y(2)的值是否为规定的第2阈值以上。在输出变量y(1)的值为第1阈值以上并且输出变量y(2)的值为第2阈值以上的情况下,cpu42判定为感官水平为规定值以上且感官水平高。cpu42在输出变量y(1)的值小于第1阈值的情况或者输出变量y(2)的值小于第2阈值的情况下,判定为感官水平低。第1阈值和第2阈值是通过实验等预先计算的值。第1阈值被设定为在突出量为第1阈值以上的情况下车辆vc的乘员对源自打齿音的噪声感到不快的值。第2阈值被设定为在突出次数为第2阈值以上的情况下车辆vc的乘员对源自打齿音的噪声感到不快的值。评价感官水平的构成不限于上述构成。例如,在输出变量y(1)的值为第1阈值以上的情况下,即使输出变量y(2)的值小于第2阈值,cpu42也能够判定为感官水平高。
55.接下来,cpu42执行将估计感官水平的结果存储于存储装置46的存储处理(s105)。在存储处理中,cpu42连同在s101的处理中获取的特征量一起将估计感官水平的结果存储
于存储装置46。在存储处理中,cpu42也可以存储评价感官水平的结果。在存储处理中存储的信息也能够作为新的训练数据而用于映射数据dm的学习。
56.接下来,cpu42判定感官水平是否高(s106)。在感官水平高的情况下(s106:是),cpu42实施用于降低打齿音的抑制控制(s107)。
57.说明抑制控制的例子。作为一个例子,在内燃机10处于运转中的情况下的抑制控制中,cpu42能够执行用于减小内燃机10的内燃机负荷的处理。例如,cpu42通过提高内燃机转速来变更内燃机10的动作点。cpu42也能够减小点火正时的延迟量而减小内燃机转矩。另外,作为一个例子,在内燃机10处于停止中的情况下的抑制控制中,cpu42能够执行用于禁止内燃机10的起动的处理。另外,cpu42也可以使内燃机10难以起动。例如,通过变更作为用于起动内燃机10的条件中的阈值的值,能够使内燃机10难以起动。另外,作为抑制控制的一个例子,cpu42也可以禁止内燃机10的间歇运转。作为抑制控制的一个例子,cpu42也可以以使电动发电机30输出的转矩的变动变小的方式控制电动发电机30。
58.在s107的处理完成时,cpu42暂时结束图2所示的一系列处理。当在s106的处理中判定为否定的情况下,cpu42暂时结束图2所示的一系列处理。
59.对本实施方式的作用进行说明。
60.cpu42基于外力f1、产生灵敏度f2以及背景噪声f3来估计感官水平。cpu42判定感官水平是否高。另外,在感官水平高的情况下,cpu42实施用于降低打齿音的抑制控制。
61.对本实施方式的效果进行说明。
62.(1)能够考虑外力f1、产生灵敏度f2以及背景噪声f3这三个要素,综合地估计感官水平。
63.(2)由于将作为特征量的外力f1设为向映射输入的输入变量,因此在估计感官水平时,能够考虑产生打齿音的外力的大小。由此,能够精度良好地估计感官水平。例如,在采用内燃机10起动前的曲柄角作为外力f1的情况下,能够基于起动内燃机10时的活塞的位置,考虑燃烧室中的压力变动。例如,在采用内燃机转速、内燃机负荷或者点火正时的延迟量作为外力f1的情况下,能够考虑内燃机10的转矩。例如,在采用电动发电机30的机械时间常数或者减振控制量作为外力f1的情况下,能够考虑电动发电机30的转矩。
64.(3)由于将作为特征量的产生灵敏度f2设为向映射输入的输入变量,因此在估计感官水平时能够考虑打齿音的产生容易度。由此,能够精度良好地估计感官水平。例如,在采用齿轮比作为产生灵敏度f2的情况下,能够考虑由变速装置20中的齿轮的组合引起的齿轮间的间隙的大小。例如,在采用工作油的温度作为产生灵敏度f2的情况下,能够考虑工作油的粘性。即,能够考虑根据工作油的粘性而工作的齿轮彼此间碰撞时的衰减。例如,在采用档位是否为p档作为产生灵敏度f2的情况下,能够考虑变速装置20的扭转特性。
65.(4)能够估计噪声的大小作为感官水平。能够以噪声的大小为指标,判定车辆vc的乘员是否对噪声感到不快。
66.(5)由于将作为特征量的背景噪声f3设为向映射输入的输入变量,因此在估计感官水平时考虑可能产生背景噪声的参数。由此,能够估计相对背景噪声的突出量作为感官水平,能够提高估计源自打齿音的噪声的大小的精度。例如,在采用车速作为背景噪声f3的情况下,能够考虑能够根据车速估计的路面噪声。例如,在采用内燃机转速作为背景噪声f3的情况下,能够考虑能够根据内燃机转速估计的发动机噪声。例如,在采用窗的开闭状态作
为背景噪声f3的情况下,能够考虑外部噪声。
67.(6)能够估计突出的次数作为感官水平。能够以突出的次数为指标,判定车辆vc的乘员是否对噪声感到不快。
68.(7)能够确定感官水平变高的动力源的动作点。由此,能够估计是否是容易产生源自打齿音的噪声的状态。
69.(8)不限于在变速装置20中产生的打齿音,关于在从动力源到车轮传递动力的路径上的动力传递机构中产生的打齿音,能够估计容易产生打齿音的状态。
70.(9)能够在所估计的感官水平高的情况下执行抑制控制。因此,能够确定处于容易产生源自打齿音的噪声的状态,从而在恰当的时期实施抑制控制。通过执行抑制控制,能够以降低打齿音的方式控制内燃机10或者电动发电机30。由此,能够降低传递到驾驶室90的噪声。
71.《对应关系》
72.上述实施方式中的事项与在上述“用于解决问题的方案”部分记载的事项的对应关系如下。噪声估计装置对应于图1的控制装置40。执行装置对应于图1的cpu42和rom44。存储装置对应于图1的存储装置46。映射数据对应于映射数据dm。获取处理对应于图2的s102的处理。估计处理对应于图2的s103的处理。车辆用控制装置对应于图1的控制装置40。
73.《其他实施方式》
74.本实施方式能够如以下这样变更实施。本实施方式和以下的变更例能够在技术上不矛盾的范围内相互组合而实施。
75.·
在上述实施方式中,作为外力f1,示出了将从第1参数组选择的一个参数设为向映射输入的输入变量的例子。也可以从第1参数组选择多个参数设为输入变量。即,从第1参数组获取一个以上的参数作为输入变量的值即可。
76.同样地,关于产生灵敏度f2也是从第2参数组获取一个以上的参数作为输入变量的值即可。
77.同样地,关于背景噪声f3也是从第3参数组获取一个以上的参数作为输入变量的值即可。
78.·
并不是必须将背景噪声f3设为向映射输入的输入变量。
79.·
也可以将车辆vc的特性设为向映射输入的输入变量。例如,通过将车辆vc的各种尺寸设为输入变量,能够考虑振动向驾驶室90传递的容易度。
80.·
也可以将可能产生打齿音的部位的规格数据设为向映射输入的输入变量。例如,也可以将齿轮的齿数、齿隙的大小或者啮合误差等设为输入变量。
81.·
向由映射数据dm规定的映射输入的输入变量不限于在上述实施方式中例示的输入变量。也能够进一步采用能够期待进一步提高估计的精度的特征量作为输入变量。
82.·
作为神经网络,不限于全连接正向传播型网络。例如,也可以使用一维的卷积神经网络。当然,作为基于机器学习的学习完毕模型,不限于神经网络。
83.·
例示了中间层的层数为1层的神经网络,但不限于此,中间层的层数也可以是2层以上。
84.·
关于训练数据,也可以对与作为输入变量的值的参数相对应的感官水平预先标记感官水平是否高的评价。在该情况下,参数和评价成为一组训练数据。也可以使用上述映
射数据dm,将感官水平的评价作为输出变量。在该情况下,能够省略图2中的s104的处理。
85.·
作为映射,不限于将突出量和突出次数作为输出变量。也可以将突出量作为输出变量。
86.·
在突出量是比规定值小的值的情况下,也可以将该突出量设为“0”而生成训练数据。即,也可以将相比于背景噪声的声压之差为规定值以上的情况设为突出。
87.·
也可以使用采用产生打齿音的部位的构件彼此间的碰撞能量代替了突出量的训练数据,进行映射数据dm的学习。碰撞能量能够通过仿真来计算。也可以使用上述映射数据dm,将碰撞能量作为输出变量。在该情况下,能够在碰撞能量为规定的判定值以上的情况下判定为感官水平高。碰撞能量和感官水平具有碰撞能量越大则感官水平越高的关系。
88.·
也可以使用采用产生打齿音的部位的构件彼此间的碰撞次数代替了突出次数的训练数据,进行映射数据dm的学习。碰撞次数能够通过仿真来计算。也可以使用上述映射数据dm,将碰撞次数作为输出变量。在该情况下,能够在碰撞次数为规定的判定次数以上的情况下判定为感官水平高。碰撞次数和感官水平具有碰撞次数越多则感官水平越高的关系。
89.·
在上述实施方式中,将存储估计结果的存储装置设为与存储有映射数据dm的存储装置相同,但不限于此。
90.·
也可以代替执行存储感官水平的估计结果的存储处理,而执行向车辆vc的制造商或者数据分析中心等发送估计结果的发送处理。还能够执行存储处理和发送处理。
91.·
控制装置40也可以具备相当于电动车窗控制装置60所具有的控制部的功能。
92.·
作为执行装置,不限于具备cpu42和rom44而执行软件处理的执行装置。例如,也可以具备对在上述实施方式中进行软件处理的至少一部分进行硬件处理的专用的硬件电路。专用的硬件电路例如是asic。即,执行装置是以下的(a)~(c)中的任一结构即可。(a)具备按照程序执行上述处理的全部的处理装置和存储程序的rom等程序储存装置。(b)具备按照程序执行上述处理的一部分的处理装置、程序储存装置以及执行其余的处理的专用的硬件电路。(c)具备执行上述处理的全部的专用的硬件电路。在此,具备处理装置和程序储存装置的软件执行装置或者专用的硬件电路也可以是多个。
93.·
能够应用控制装置40的车辆不限于图1所示的车辆vc。只要是具备动力源和动力传递机构的车辆,就能够应用控制装置40。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。