一种适应快速变化agc指令的机组负荷控制方法
技术领域
1.本发明属于电网火力发电汽轮机组控制技术领域,尤其涉及一种适应快速变化agc指令的机组负荷控制方法。
背景技术:
2.目前,为保证电网供电质量的要求,电网调度机构对并网运行的火力发电汽轮机组实行自动发电控制(automatic generation control,agc),同时对火电机组的agc指令响应速率、响应时间和控制精度等指标提出了控制要求。
3.火力电发电机组通过锅炉燃烧将煤的化学能量转换成热能,并利用水作为工质吸收热能后在汽轮机中做功,带动发电机发电的方法,实现由燃煤化学能到电能的一系列能量转变过程,以此满足社会的用电需求。水和蒸汽的热力循环系统主要由锅炉和汽轮机等设备组成,并通过与汽轮机组同轴驱动的发电机,将机械能转换为电能。其中调速汽门是满足电网负荷调度而设置的主要调节设备。
4.机组的整体负荷由分散控制系统(distributed control system,dcs)进行实时控制。dcs将接收到的agc负荷指令进行限幅与限速处理,生成机组负荷指令(发电负荷指令),再将其与机组实时功率比较,调节锅炉燃料量、送风量与给水流量,以此改变锅炉的出力,以满足汽轮机的做功需求;同时,dcs对汽轮机调速汽门开度进行控制,改变汽轮机出力,进而调整机组的发电功率。dcs通过协调锅炉与汽轮机间的能量供需平衡,实时调整机组出力,实现对agc指令的响应。
5.当前各机组在控制策略设计时主要考虑满足“两个细则”的agc考核要求。当机组的调节速率高于该考核要求时,机组就不会因为调节速率而发生考核费用。但在电力市场调频辅助服务的环境中,机组性能竞争来自于机组之间调节性能的高低区别,只有尽量提升自身的调节性能才能在报价和调频收入的博弈中占得优势。而这就对机组的调节性能指标提出了更高的要求。
6.随着电力市场调频辅助服务工作的推进,目前调度下发至机组的agc指令特性发生了较大变化。agc指令的频次与幅度较以往有大幅提升,而运行规则对机组的agc响应性能也提出了更高的要求。传统的负荷控制策略在调整机组出力时,仅对接受的agc负荷指令进行简单的限幅与限速处理后,即作为机组的负荷指令。生成具有固定爬坡速率的机组负荷设定值,并将其同时作为锅炉与汽机的负荷设定值进行出力调整;但由于锅炉燃烧系统调节的滞后和汽水系统的机组惯性影响,当机组变负荷时,锅炉侧出力变化较慢,无法快速精准响应功率的变化,机组实际负荷的变化往往无法完全跟上机组负荷设定值的变化,在动态过程中存在一定程度的滞后和偏差。
7.常规汽机负荷控制策略中agc指令限幅限速的处理方式,在电力市场调频辅助服务中,agc指令动作频繁下发且来回波动时,存在较多的快速加减负荷交替进行的指令;对高频次、agc指令快速大幅度相反方向交替变化的agc指令适应性不强,这种实际负荷的调节滞后在调节过程中易出现调节死区,极大地影响机组的负荷调节性能指标(导致机组负
荷调节性能的下降),导致机组的响应速率、调节精度等指标无法满足要求,影响机组负荷调节性能考核结果,产生较多的电量考核;
8.由于agc指令快速频繁的变化,负荷指令往往在在变化过程中就接收到下一个反方向的agc指令。而此时机组的实际负荷还未到达之前负荷指令,机组实际负荷调节的方向依然保持不变。这会导致在收到新的agc指令后的一段时间内,机组的实际负荷调节存在死区,实际负荷与指令的变化呈现相反的趋势;特别是在机组的锅炉燃烧惯性较大,出力变化较慢时,采用常规的负荷控制策略,将难以满足当前agc调度的要求。
9.下面从控制原理分析原因:
10.1)限幅限速后的agc指令(unit load demand)简称uld指令,uld指令送至汽机控制回路称为汽机负荷设定值,汽机负荷设定值与实际负荷的差值作为汽机改变调节汽门开度大小的依据,当实际负荷小于设定值时汽机增大调门开度增加进汽量,当实际负荷大于设定值时,汽机减小调门开度减少进汽量。
11.2)另外uld指令为agc指令限幅限速后得到,调度下发agc指令后需经过一段时间uld指令才能与agc指令数值一致,而实际负荷的调节跟随汽机负荷设定值;当agc指令的频次与幅度变化过快,可能出现汽机负荷设定值还未变化至上一agc指令时,下一个agc指令就已经下发的问题;一般来说实际负荷的响应具有一定的滞后,当连续两个agc指令动作方向相反(先增后减或先减后增),实际负荷响应滞后较多的情况下,第二个agc指令开始下发至汽机,负荷设定值回调至实际负荷;相同的时间内汽机调节负荷的动作方向与agc指令的动作方向相反,可认为该时间内机组响应agc调节为反向调节,极大影响了机组的agc速率调节。
12.因此,必须针对快速变化的agc指令设计相应的控制策略,消除负荷调整过程中的死区,提高机组的负荷响应能力。
技术实现要素:
13.本发明的目的是克服现有技术中的不足,提供一种适应快速变化agc指令的机组负荷控制方法。
14.这种适应快速变化agc指令的机组负荷控制方法,包括以下步骤:
15.步骤1、发电机组负荷控制系统内的工业控制计算机在火力发电汽轮机组稳定运行时,将指令接收装置提供的agc指令进行限幅处理和限速处理;进行限幅处理和限速处理后,部分agc指令作为机组负荷指令(即有功功率的目标值),剩余agc指令作为汽轮机负荷指令;将汽轮机负荷指令与经过功率变送器测得的发电机实际功率相比较,运算生成汽轮机调速汽门的开度指令(为汽机指令计算至各调速汽门的指令,各机组根据本身的负荷调节特性通过dcs控制系统常用的函数功能块对调速汽门的开度指令进行设置,由于汽轮机控制分单阀运行和多阀运行,两种运行方式下调速汽门的开度指令也具有差异,因此无法给出具体的运算公式);调节汽轮机负荷指令至与发电机实际功率一致;
16.步骤2、当工业控制计算机接收到调度机构新下发的agc指令时,对新下发的agc指令与当前的汽轮机负荷指令进行比较,并生成升负荷指令滞后信号或降负荷指令滞后信号;汽轮机负荷指令根据比较结果,对机组负荷指令或实际负荷进行跟踪,生成汽轮机负荷设定值,并对汽轮机负荷进行调节,直至达到汽轮机负荷设定值;
17.步骤3、汽轮机负荷指令对机组负荷指令或实际负荷的跟踪状态结束后,汽轮机负荷指令从当前值开始,重新接受经过限幅处理的agc指令;返回重复执行步骤1至步骤2,得到汽轮机负荷设定值,将汽轮机负荷设定值与功率变送器实时测量的机组功率进行比较,工业控制计算机计算生成调速汽门的开度指令,调节汽轮机负荷指令至与发电机实际功率一致;
18.步骤4、在收到升负荷指令滞后信号或降负荷指令滞后信号后,直接保持工业控制计算机的计算输出,工业控制计算机的计算输出为汽机主控指令的计算输出,停止功率变送器的测量;汽机主控指令根据负荷指令与发电机实际功率经过pid调节输出,由于pid调节器的指令和反馈偏差突然改变会引起调节输出大幅波动,保持输出是为了防止在收到滞后信号后快速切换汽机负荷设定值引起扰动;
19.步骤5、工业控制计算机上设有切换功能块,切换功能块的指令切换完成后,功率变送器恢复测量发电机功率,工业控制计算机恢复计算;按照实际负荷与处理后的汽机负荷设定值进行负荷控制,负荷控制方式为在机组变负荷过程中出现实际发电机功率滞后且下一个agc指令反向调整时,将汽机负荷设定值切换为当前实际发电机功率值,消除汽机指令的调节死区,提高agc响应速率。
20.作为优选,步骤2具体包括如下步骤:
21.步骤2.1、将调度机构新下发的agc指令与当前的汽轮机负荷指令进行比较,经过脉冲信号发生器生成升负荷脉冲信号和降负荷脉冲信号;
22.步骤2.2、当收到升负荷脉冲信号或降负荷脉冲信号后,工业控制计算机判断当前机组实际负荷、agc指令和当前汽轮机负荷指令的关系;并生成升负荷指令滞后信号或降负荷指令滞后信号;
23.步骤2.3、在收到升负荷指令滞后信号或降负荷指令滞后信号后,根据agc指令、机组负荷指令以及实际负荷,对汽轮机负荷指令进行处理,生成汽轮机负荷设定值。
24.作为优选,步骤2.2具体包括以下步骤:
25.步骤2.2.1、若工业控制计算机接收到升负荷脉冲信号、当前机组实际负荷大于汽机负荷设定值、且当前机组实际负荷小于未进行限速处理的负荷指令目标值时,则生成升负荷指令滞后信号;
26.步骤2.2.2、若工业控制计算机接收到降负荷脉冲信号、当前机组实际负荷小于汽机负荷设定值、且当前机组实际负荷大于未进行限速处理的负荷指令目标值时,则生成降负荷指令滞后信号。
27.作为优选,步骤2.3具体包括以下步骤:
28.步骤2.3.1、当收到升负荷指令滞后信号时,若agc指令大于机组负荷指令,则汽轮机负荷指令跟踪机组负荷指令与实际负荷间的较大值,生成汽轮机负荷设定值,汽轮机负荷指令按照既定速率开始上升;
29.步骤2.3.2、当收到降负荷指令滞后信号时,若agc指令小于机组负荷指令,则汽轮机负荷指令跟踪机组负荷指令与实际负荷间的较小值,生成汽轮机负荷设定值,汽轮机负荷指令按照既定速率开始下降;
30.步骤2.3.3、当不符合步骤2.3.1及步骤2.3.2中的情况时,汽轮机负荷指令跟踪实际负荷,生成汽轮机负荷设定值。
31.作为优选,步骤2.3.1至步骤2.3.3中汽轮机负荷指令的跟踪状态在跟踪信号消失后保持1秒。
32.作为优选,步骤1中对agc指令进行限速处理时设置了控制开关;若步骤2.2触发升负荷指令滞后信号或降负荷指令滞后信号,则解除对agc指令进行的限速处理,瞬间完成汽轮机负荷指令的跟踪;若步骤2.2未触发升负荷指令滞后信号或降负荷指令滞后信号,汽轮机负荷指令为限幅限速后的agc指令。
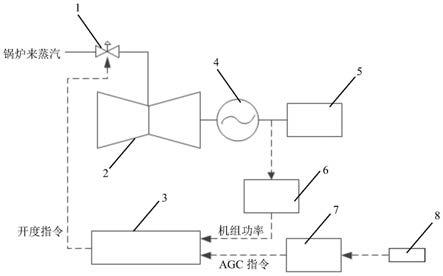
33.作为优选,发电机组负荷控制系统内:调速汽门一端连接锅炉来蒸汽管道,调速汽门另一端连接汽轮机的蒸汽入口;汽轮机电连接发电机,发电机电连接电网;发电机还电连接功率变送器;调度机构电连接指令接收装置;调速汽门、指令接收装置和功率变送器均电连接工业控制计算机。
34.作为优选,调速汽门用于调节汽轮机的出力;指令接收装置用于接收agc指令;功率变送器用于测量发电机功率;其中工业控制计算机用于接收来自指令接收装置的agc指令和来自功率变送器的发电机组功率,还用于向调速汽门下发开度指令;工业控制计算机还进行逻辑判断。
35.作为优选,步骤5中切换功能块的输入为两路模拟量信号和一路开关量信号,输出为一路模拟量,两路模拟量信号分为yes端和no端,当输入开关量信号为1时,选择yes端模拟量信号进行输出,当输入开关量信号为0时,选择no端模拟量信号进行输出。
36.本发明的有益效果是:为了提高机组负荷的调节性能指标,本发明提出一种适应快速变化agc指令的控制方法。本发明的方法结合测量数据及逻辑运算对收到的快速变化的agc指令进行处理,利用汽轮机快速调节负荷的特性和锅炉蓄热;判断agc调节过程中调节死区是否存在,并在agc指令快速来回波动时,消除机组响应agc指令过程中存在的死区;在保证机组运行安全的基础上,有效提升机组的负荷调节性能指标,提高机组的agc响应能力和负荷控制精准度。本发明的方法用于对接受调度agc指令的发电机组进行调速汽门控制。
附图说明
37.图1为发电机组负荷控制系统结构示意图;
38.图2为发电机组负荷指令生成回路示意图;
39.图3为升负荷脉冲与降负荷脉冲判断生成回路示意图;
40.图4为升负荷指令滞后与降负荷指令滞后判断生成回路示意图;
41.图5为汽轮机负荷指令生成回路示意图;
42.图6为实施例二中某1000mw等级机组5分钟内的agc调节曲线图;
43.图7为实施例二中采用本发明后某1000mw等级机组5分钟内的agc调节曲线。
44.附图标记说明:调速汽门1、汽轮机2、工业控制计算机3、发电机4、电网5、功率变送器6、指令接收装置7、调度机构8。
具体实施方式
45.下面结合实施例对本发明做进一步描述。下述实施例的说明只是用于帮助理解本发明。应当指出,对于本技术领域的普通人员来说,在不脱离本发明原理的前提下,还可以
对本发明进行若干修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
46.实施例一
47.本技术实施例一提供了一种适应快速变化agc指令的机组负荷控制方法:
48.步骤1、发电机组负荷控制系统内的工业控制计算机3在火力发电汽轮机组稳定运行时,将指令接收装置7提供的agc指令进行限幅处理和限速处理;进行限幅处理和限速处理后,部分agc指令作为机组负荷指令,剩余agc指令作为汽轮机负荷指令;将汽轮机负荷指令与经过功率变送器6测得的发电机实际功率相比较,运算生成汽轮机调速汽门的开度指令;调节汽轮机负荷指令至与发电机实际功率一致;改变汽轮机及发电机的出力,以此实现对机组功率的精确闭环控制;对agc指令进行限速处理时设置了控制开关;汽轮机负荷指令生成如图2所示;
49.步骤2、当工业控制计算机3接收到调度机构8新下发的agc指令时,为消除调节死区,提高机组的负荷响应能力,对新下发的agc指令与当前的汽轮机负荷指令进行比较(比较逻辑如图3所示),并生成升负荷指令滞后信号或降负荷指令滞后信号(如图4所示);判断当前的汽轮机负荷指令响应过程是否存在调节死区;汽轮机负荷指令根据比较结果,对机组负荷指令或实际负荷进行跟踪,生成汽轮机负荷设定值,并对汽轮机负荷进行调节,直至达到汽轮机负荷设定值;
50.步骤2.1、将调度机构8新下发的agc指令与当前的汽轮机负荷指令进行比较,经过脉冲信号发生器生成升负荷脉冲信号和降负荷脉冲信号;
51.步骤2.2、当收到升负荷脉冲信号或降负荷脉冲信号后,工业控制计算机3判断当前机组实际负荷、agc指令和当前汽轮机负荷指令的关系;并生成升负荷指令滞后信号或降负荷指令滞后信号;
52.若步骤2.2触发升负荷指令滞后信号或降负荷指令滞后信号,则解除对agc指令进行的限速处理,瞬间完成汽轮机负荷指令的跟踪;若步骤2.2未触发升负荷指令滞后信号或降负荷指令滞后信号,汽轮机负荷指令为限幅限速后的agc指令;
53.步骤2.2.1、若工业控制计算机3接收到升负荷脉冲信号、当前机组实际负荷大于汽机负荷设定值、且当前机组实际负荷小于未进行限速处理的负荷指令目标值时,则生成升负荷指令滞后信号;
54.步骤2.2.2、若工业控制计算机3接收到降负荷脉冲信号、当前机组实际负荷小于汽机负荷设定值、且当前机组实际负荷大于未进行限速处理的负荷指令目标值时,则生成降负荷指令滞后信号;
55.步骤2.3、在收到升负荷指令滞后信号或降负荷指令滞后信号后,根据agc指令、机组负荷指令以及实际负荷,对汽轮机负荷指令进行处理,生成汽轮机负荷设定值;
56.步骤2.3.1、当收到升负荷指令滞后信号时,若agc指令大于机组负荷指令,则汽轮机负荷指令跟踪机组负荷指令与实际负荷间的较大值,生成汽轮机负荷设定值,汽轮机负荷指令按照既定速率开始上升;
57.步骤2.3.2、当收到降负荷指令滞后信号时,若agc指令小于机组负荷指令,则汽轮机负荷指令跟踪机组负荷指令与实际负荷间的较小值,生成汽轮机负荷设定值,汽轮机负荷指令按照既定速率开始下降;
58.步骤2.3.3、当不符合步骤2.3.1及步骤2.3.2中的情况时,汽轮机负荷指令跟踪实
际负荷,生成汽轮机负荷设定值;
59.汽轮机负荷指令的跟踪状态在跟踪信号消失后保持1秒;
60.步骤3、汽轮机负荷指令对机组负荷指令或实际负荷的跟踪状态结束后,汽轮机负荷指令从当前值开始,重新接受经过限幅处理的agc指令;返回重复执行步骤1至步骤2,得到汽轮机负荷设定值,将汽轮机负荷设定值与功率变送器6实时测量的机组功率进行比较,工业控制计算机3计算生成调速汽门1的开度指令,调节汽轮机负荷指令至与发电机实际功率一致;
61.步骤4、为避免负荷指令切换过程中,负荷指令的瞬间变化影响汽轮机调门的输出,在收到升负荷指令滞后信号或降负荷指令滞后信号后,直接保持工业控制计算机3的计算输出,工业控制计算机3的计算输出为汽机主控指令的计算输出,停止功率变送器6的测量,避免跟踪过程出现较大扰动;
62.步骤5、工业控制计算机3上设有切换功能块,切换功能块的指令切换完成后,功率变送器6恢复测量发电机功率,工业控制计算机3恢复计算;按照实际负荷与处理后的汽机负荷设定值进行负荷控制,负荷控制方式为在机组变负荷过程中出现实际发电机功率滞后且下一个agc指令反向调整时,将汽机负荷设定值切换为当前实际发电机功率值;切换判断、生成汽轮机负荷指令的逻辑如图5所示;切换功能块的输入为两路模拟量信号和一路开关量信号,输出为一路模拟量信号,两路模拟量信号分为yes端和no端,当输入开关量信号为1时,选择yes端模拟量信号进行输出,当输入开关量信号为0时,选择no端模拟量信号进行输出。
63.如图1所示,发电机组负荷控制系统内:调速汽门1一端连接锅炉来蒸汽管道,调速汽门1另一端连接汽轮机2的蒸汽入口;汽轮机2电连接发电机4,发电机4电连接电网5;发电机4还电连接功率变送器6;调度机构8电连接指令接收装置7;调速汽门1、指令接收装置7和功率变送器6均电连接工业控制计算机3。
64.实施例二
65.在实施例一的基础上,本技术实施例二提供了实施例1中适应快速变化agc指令的机组负荷控制方法的应用实例:
66.某1000mw等级机组5分钟内的agc调节曲线如图6所示,由于agc指令快速频繁的变化,负荷指令往往在在变化过程中就接收到下一个反方向的agc指令。而此时机组的实际负荷还未到达之前负荷指令,机组实际负荷调节的方向依然保持不变。这会导致在收到新的agc指令后的一段时间内,机组的实际负荷调节存在死区,实际负荷与指令的变化呈现相反的趋势(如图6中圆圈内部分所示)。
67.对此,利用本发明所提出的控制方式进行指令处理,以同样的初始状态及agc指令变化过程进行控制,其结果如图7所示,具体过程如下:
68.1)开始模拟试验前,先设定各变量的数值,机组agc指令、负荷指令和实际负荷均在900mw左右稳定运行。在第一次变负荷时刻,机组收到agc指令升至915mw,逻辑判断为“升负荷”,但不满足其他相关切换条件,进行正常变负荷,汽轮机负荷指令按照既定速率开始上升。
69.2)在变负荷过程中,agc重新下发指令,降负荷至897mw,逻辑判断为“降负荷”。由于实际负荷变化较慢,逻辑判断“降负荷指令滞后”条件满足,将汽轮机负荷指令切换跟踪
至当前机组实际负荷后,再以既定速率进行减负荷操作。
70.3)在减负荷过程中,agc再度重新下发指令,升负荷至907mw,逻辑判断为“升负荷”。由于实际负荷变化较慢,逻辑判断“升负荷指令滞后”条件满足,将汽轮机负荷指令切换至当前机组实际负荷后,再以既定速率进行升负荷操作。
71.4)此后,agc指令多次重新下发,呈现进行反复变化特征,逻辑判断触发多次指令的跟踪切换回路。
72.由可知结果,根据本发明设计的策略,当agc指令下发频繁且来回波动时,汽轮机负荷指令能够快速跟踪至当前实际负荷并进行控制,有效消除了如图6中所示的调节死区。在本实例中,采用本发明所提出的负荷控制策略,能够始终保证实际负荷变化与调度agc指令方向相一致,改善了机组的调节性能,提高了对agc指令的响应能力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。