技术特征:
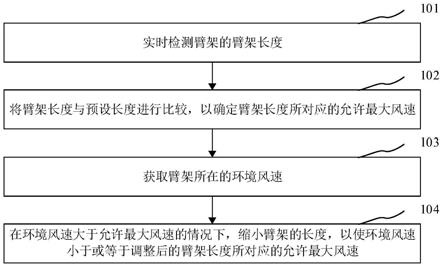
1.一种用于臂架的控制方法,其特征在于,包括:实时检测所述臂架的臂架长度;将所述臂架长度与预设长度进行比较,以确定所述臂架长度所对应的允许最大风速;获取所述臂架所在的环境风速;在所述环境风速大于所述允许最大风速的情况下,缩小所述臂架的长度,以使所述环境风速小于或等于调整后的臂架长度所对应的允许最大风速。2.根据权利要求1所述的用于臂架的控制方法,其特征在于,所述预设长度包括所述臂架的初始长度和第一长度,将所述臂架长度与预设长度进行比较,以确定所述臂架长度所对应的允许最大风速包括:在所述臂架长度大于所述初始长度且小于或等于所述第一长度的情况下,确定所述臂架长度所对应的允许最大风速为第一风速。3.根据权利要求2所述的用于臂架的控制方法,其特征在于,所述预设长度还包括第二长度,将所述臂架长度与预设长度进行比较,以确定所述臂架长度所对应的允许最大风速还包括:在所述臂架长度大于所述第一长度且小于或等于所述第二长度的情况下,确定所述臂架长度所对应的允许最大风速为第二风速;其中,所述第一风速大于所述第二风速。4.根据权利要求3所述的用于臂架的控制方法,其特征在于,所述预设长度还包括第三长度,将所述臂架长度与预设长度进行比较,以确定所述臂架长度所对应的允许最大风速还包括:在所述臂架长度大于所述第二长度且小于或等于所述第三长度的情况下,确定所述臂架长度所对应的允许最大风速为第三风速;其中,所述第二风速大于所述第三风速。5.根据权利要求1所述的用于臂架的控制方法,其特征在于,还包括:实时获取所述臂架的臂架倾翻方向和所述臂架所在的环境风向;在所述臂架倾翻方向和所述环境风向的风向一致的情况下,调整所述臂架的方向以使所述臂架倾翻方向与所述环境风向的风向相反。6.根据权利要求5所述的用于臂架的控制方法,其特征在于,还包括:在所述臂架倾翻方向和所述环境风向的风向相反的情况下,允许所述臂架正常动作。7.根据权利要求1至6中任意一项所述的用于臂架的控制方法,其特征在于,还包括:在所述环境风速大于所述允许最大风速的情况下,发送报警指令至报警装置,以通过所述报警装置启动报警提示。8.根据权利要求1至6中任意一项所述的用于臂架的控制方法,其特征在于,还包括:在所述环境风速小于或等于所述允许最大风速的情况下,允许所述臂架正常动作。9.一种处理器,其特征在于,被配置成执行根据权利要求1至8中任意一项所述的用于臂架的控制方法。10.一种用于臂架的控制装置,其特征在于,包括根据权利要求9所述的处理器。11.一种臂架,其特征在于,包括:长度检测设备,用于实时检测所述臂架的臂架长度;
风速检测设备,用于获取所述臂架所在的环境风速;以及根据权利要求10所述的用于臂架的控制装置。12.一种机器可读存储介质,该机器可读存储介质上存储有指令,其特征在于,该指令在被处理器执行时使得所述处理器被配置成执行根据权利要求1至8中任一项所述的用于臂架的控制方法。
技术总结
本申请实施例提供一种用于臂架的控制方法、装置、处理器、存储介质及臂架。方法包括:实时检测臂架的臂架长度;将臂架长度与预设长度进行比较,以确定臂架长度所对应的允许最大风速;获取臂架所在的环境风速;在环境风速大于允许最大风速的情况下,缩小臂架的长度,以使环境风速小于或等于调整后的臂架长度所对应的允许最大风速。通过上述技术方案,基于臂架长度对允许最大风速进行分级控制,更大限度地发挥了臂架的性能优势,使其能够适用不同风速下的工况,对臂架的控制更加灵活,应用的场景更加广泛。更加广泛。更加广泛。
技术研发人员:陈新志 刘宇 禹源
受保护的技术使用者:湖南中联重科应急装备有限公司
技术研发日:2021.12.29
技术公布日:2022/5/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。