1.本发明涉及智能交通技术领域,特别设计车路协同中的紧急车辆在交叉口的通行车速引导。
背景技术:
2.近年来,随着通信技术,物理设备的发展,车路协同逐渐成为智慧交通领域的研究热点,在车路协同系统中,人、车、路协同控制,依靠低时延,高速的无线通信技术和物联网感知技术,实现了车与车,车与路之间可靠安全快速的信息交互,也为更多的车路协同应用提供了坚实基础。
3.目前车路协同技术应用有几大方向,例如信号控制,事故处理,应急管理,安全预防,碰撞预警,辅助驾驶等等。在应急管理场景下的救护车,消防车等紧急特殊车辆,其执行关乎人民群众的生命财产安全。因此,提高特殊车辆的通行效率与通行安全具有非常重要的意义,如何在保证特殊车辆的通行速度和安全下结合紧急车辆与其他非紧急车辆之间的协同合作能力是一个亟待解决的关键问题。
技术实现要素:
4.本发明需要解决的问题是,提供一种新的通过协作其他非紧急车辆的车路协同紧急车辆通行系统,采用新的技术方案,在对紧急车辆进行通行引导的同时,对紧急车辆周边非紧急车辆进行车速引导和行驶辅助,帮助其快速通过信号交叉口,从而达到辅助紧急车辆快速通行的目的。
5.本发明解决以上问题采用如下技术方案:
6.本发明提供一种基于车路协同紧急车辆的信号交叉口车速引导系统,包括紧急车辆感知模块,非紧急车辆感知模块,车速引导模块和信号配时调整模块。
7.紧急车辆感知模块与非紧急车辆感知模块为并行关系,紧急车辆感知模块获取到紧急车辆行驶信息后与非紧急车辆感知模块相互合作,将感知信息输入到车速引导模块和信号配时调整模块中,车速引导模块和信号配时模块并行计算,生成车速引导策略与信号配时策略,引导车辆通行。
8.进一步的,基于车路协同紧急车辆的信号交叉口车速引导系统,其特征在于,包括:
9.紧急车辆感知模块,用于获取紧急车辆行驶信息,与其他路网节点共享车辆实时信息;其中,所述紧急车辆行驶信息包括:紧急车辆唯一识别码,车辆类型,车辆行驶路线,车辆所在车道。
10.非紧急车辆感知模块,用于获取其他非紧急车辆行驶信息,以便配合紧急车辆优先通行;其中,所述非紧急车辆行驶信息包括:车辆识别码,车辆所在车道。
11.车速引导模块,用于计算当前车辆的推荐车速。
12.信号配时调整模块,用于计算紧急车辆可以顺利通过交叉口需调整的配时策略。
13.进一步的,所述车速引导模块,还用于:
14.对紧急车辆,保证其最大限度的不停车快速通过交叉口,在有前车且无法换道的情况下,同时避免其碰撞风险。
15.对参与配合紧急车辆优先通行的非紧急车辆,引导其车速,以减少非紧急车辆对紧急车辆的行驶影响。
16.本发明提出一种基于车路协同的紧急车辆信号交叉口车速引导方法,其特征在于,包括:
17.紧急车辆通过邻接交叉口后,邻接交叉口第一路侧智能节点感知到紧急车辆通过信息,发送紧急信号给紧急车辆下游交叉口的第二路侧智能节点。
18.进一步的,紧急信号包括:紧急车辆唯一识别码,车辆类型,行驶路线。
19.第二路侧智能节点接收到紧急信号后与紧急车辆建立通信,生成自由换道区优先通行策略发送给紧急车辆其他非紧急车辆。
20.进一步的,自由换道区优先通行策略包括:两交叉口间紧急车辆所在相位各车道排队长度,选取最小排队长度为推荐紧急车辆行驶车道。
21.第二路侧智能节点接收到紧急信号与其他非紧急车辆建立广播通信,生成自由换道区避让策略发送给其他非紧急车辆。
22.进一步的,自由换道区避让策略包括:在紧急车辆推荐行驶车道,且在自由换道区的前车及时变换其他车道。
23.紧急车辆进入车速引导区时,紧急车辆的车载终端与第二路侧智能节点通信获取周边感知信息进行车速计算。
24.进一步的,紧急车辆进入车速引导区后获得的周边感知信息包括:当前相位信号控制信息,前方排队车辆信息和当前紧急车辆距离停车线的距离。
25.紧急车辆前方排队车辆智能终端获取第二路侧智能节点广播的周边感知信息进行车速计算。
26.进一步的,紧急车辆前方非紧急车辆获取的第二路侧智能节点广播的周边感知信息包括:当前信号控制信息,前车的速度信息与车间时距。
27.路侧智能单元与紧急车辆进行信息交互,根据紧急车辆的车速和位置结合信号状态进行信号配时调整优化,确保紧急车辆能够高效快速不停车的通过交叉口。
28.本发明具有以下优势:
29.在车路协同系统中,通过c-v2x技术,车辆能够与路侧rsu实时交互信息,对周边环境得到全面感知,在到达交叉口与驶出交叉口时生成对应的车辆通行方案,能够避免车辆冲突,调整信号灯时间与交叉口车辆车速,通过交叉口非紧急车辆,紧急车辆与路侧智能设备的协同合作,达到紧急车辆优先快速通行的目的。
附图说明
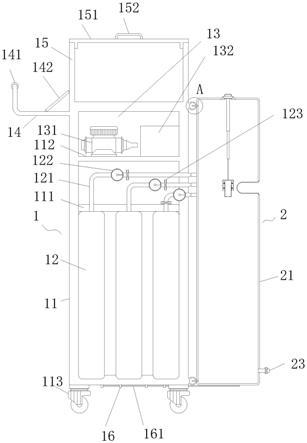
30.图1为基于车路协同紧急车辆的信号交叉口车速引导示意图
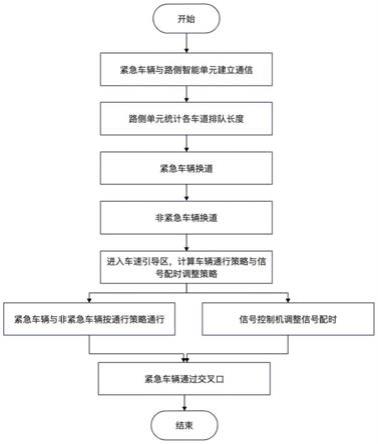
31.图2为基于车路协同紧急车辆的信号交叉口车速引导方案流程
具体实施方式
32.为了更清晰的阐述本发明具体实施方式,下面结合附图及实施例,对本发明进行进一步详细说明。显然的,以下描述的实施例仅是本发明部分实施例,而不是全部实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施例,都属于本发明所保护的范围。
33.下面将结合参考附图来详细说明本发明实施例。
34.图1为基于车路协同紧急车辆的信号交叉口车速引导示意图。如图1所示,包括交通信号控制机,路侧智能单元rsu和车载智能单元obu,交通信号控制机用于更改信号配时方案,并将信号灯的相位与配时信息周期上报给路侧智能单元,路侧智能单元rsu用于确定交叉口区域内车辆信息的高精度定位,转发信号配时方案信息给车载智能终端。车载智能单元obu用于与路侧单元rsu进行v2i车路通信,计算车速,将当前车辆的车辆信息,例如车速,经纬度和车辆类型,车道信息,是否紧急车辆反馈给rsu。
35.本发明中的交通信号控制机,路侧智能单元rsu和车载智能单元obu在车路协同系统中,均使用v2x通信技术,交通信号控制机包括数据通讯模块和信号展示模块,车载obu包括数据处理模块,定位模块,5g通讯模块与v2x通讯模块,车内状态采集模块,驾驶辅助模块和控制模块,路侧智能rsu包括感知模块,车路协同通信模块,辅助高精度定位模块。
36.以下,通过具体的实施例进一步详细说明本公开的技术方案。
37.参考图2,本发明一个实施例的于车路协同紧急车辆的信号交叉口车速引导方法,包括以下步骤:
38.步骤1,建立通信
39.当紧急车辆通过邻接交叉口时,邻接交叉口出口道的rsu接受到紧急车辆通过信息后,与车辆行驶方向的下流交叉口进口道rsu进行信息交互,发送紧急车辆信息。同时紧急车辆与下流交叉口的rsu建立通讯连接。
40.步骤2,统计各车道排队长度
41.下流交叉口进口道rsu接收到紧急信息后,统计当前各车道的车辆排队长度,计算出排队长度最小的车道推送到紧急车辆,同时推送紧急车辆换道建议。
42.步骤3,紧急车辆换道
43.紧急车辆换道到最小排队长度的车道后,发送换道完成信息给车辆行驶方向的下流交叉口进口道rsu。
44.步骤4,非紧急车辆换道
45.交叉口进口道路侧单元获取到紧急车辆换道完成信息后,对紧急车辆所在车道的前方车辆广播发送换道信息,提醒前方车辆避让。
46.步骤5,车速引导区车辆通行
47.紧急车辆继续行驶进入车速引导区之后,路侧rsu发送信控灯信息给紧急车辆和所在车道的前方车辆,实现紧急车辆和前方非紧急车辆车速引导策略和通行策略。
48.上述车辆车速引导方法中,所述紧急车辆和前方非紧急车辆车速引导策略时:
49.当紧急车辆到达车速引导区时所在相位信号灯为绿灯,绿灯剩余时间为t
remain
,获取紧急车辆当前车速为v0,考虑行车安全与道路限速,车辆最大速度为v
max
,当前车辆距交叉口停车线的距离为d。
50.①
紧急车辆到达车速引导区时所在相位信号灯为绿灯,且前方未存在排队车辆时,则计算绿灯结束前紧急车辆可以到达停车线的匀速速度为:vs=d/t
remain
;
51.若vs<v0,说明在绿灯结束前紧急车辆按照原速度行驶可以通过交叉口,此种情况下紧急车辆保持匀速行驶即可,且绿灯无需延时,推荐紧急车辆车速:v=v0;
52.若vs≥v0,说明在绿灯结束前紧急车辆按照原速度行驶无法通过交叉口,此种情况下需要考虑车辆的加速与绿灯的延时,则车辆在到达交叉口停车线前的行驶应满足:
[0053][0054]
式中:v0为紧急车辆当前车速,a为紧急车辆加速度,t1为车辆加速时间,t2为车辆加速完成后匀速行驶时间。
[0055]
若t1 t2<t
remain
,说明车辆加速后可以在不调整绿灯时长的情况下通过交叉口,则推荐紧急车辆车速:v=v
max
。
[0056]
若t1 t2≥t
remain
,说明车辆加速后需要在调整绿灯时长的情况下通过交叉口,则推荐紧急车辆车速:v=v
max
,绿灯调整时长为tm=t1 t
2-t
remain
。
[0057]
②
紧急车辆到达车速引导区时所在相位信号灯为绿灯,且前方存在排队车辆。
[0058]
对于非紧急车辆,若当前车辆所在车道有紧急车辆,且紧急车辆在当前车辆后方,当前车辆前方无前车,则该车辆为非紧急车辆车队头车。紧急车辆到达车速引导区后,为避免紧急车辆加速后与前方车辆冲突,路侧rsu与非紧急车辆头车建立通信,引导前方车辆头车进行加速至v
max
。
[0059]
头车后方的其他车辆跟随头车加速行驶,根据线性跟驰模型计算得出,在时间t1后整体非紧急车辆车队速度提升为v
max
,车队尾车前进距离为d1。
[0060]
在时间t1内,判断紧急车辆有无碰撞风险,如有碰撞风险,紧急车辆进行减速行为,如无碰撞风险,紧急车辆匀速行驶。
[0061]
在时间t1后,紧急车辆行驶为d2,此时紧急车辆可以进行加速行为。
[0062]
若d2>d且t1<t
remain
,则在绿灯结束前,前方车队和紧急车辆均可以顺利通过交叉口,此时绿灯时间无需延长,紧急车辆推荐车速为v=v0。
[0063]
若d2<d,紧急车辆在到达交叉口停车线前的行驶应满足:
[0064][0065]
式中:v0为紧急车辆当前车速,a为紧急车辆加速度,t2为紧急车辆在到达交叉口停车线前的车辆行驶时间。
[0066]
若t2<t
remain-t1,说明车辆加速后可以在不调整绿灯时长和无冲突的情况下通过交叉口,则推荐紧急车辆车速:v=v
max
;
[0067]
若t2≥t
remain-t1,说明车辆加速后需要在调整绿灯时长的情况下通过交叉口,则推荐紧急车辆车速:v=v
max
,绿灯调整时长为tm=t1 t
2-t
remain
。
[0068]
当紧急车辆到达车速引导区时所在相位信号灯为红灯,红灯剩余时间为t
remain
,为获取紧急车辆当前车速为v0,考虑行车安全与道路限速,车辆最大速度为v
max
,当前车辆距交叉口停车线的距离为d。
[0069]
①
紧急车辆到达车速引导区时所在相位信号灯为红灯,且前方未存在排队车辆时,计算紧急车辆加速到达停车线时间:
[0070][0071]
式中:v0为紧急车辆当前车速,a为紧急车辆加速度,t1为紧急车辆在到达交叉口停车线前的车辆行驶时间。
[0072]
若t1≥t
remain
,则紧急车辆在到达停车线时绿灯开启,可以以最大速度不停车通过交叉口。则推荐紧急车辆车速:v=v
max
,无需调整红灯时间。
[0073]
若t1<t
remain
,则紧急车辆以最大速度行驶到达停车线时红灯未结束,需要调整速度与红灯时长以通过交叉口。
[0074]
若t1<t
remain
且则紧急车辆在到达停车线时绿灯开启,可以以进入车速引导区的原始速度v0不停车通过交叉口。则推荐紧急车辆车速:v=v0,无需调整红灯时间。
[0075]
若t1<t
remain
且则紧急车辆在到达停车线时红灯未结束,则红灯调整时间为推荐紧急车辆车速:v=v0。
[0076]
②
紧急车辆到达车速引导区时所在相位信号灯为红灯,且前方存在排队车辆时,紧急车辆与车队车尾之间的车间距离为d
vv
。此时当前相位的红灯需要尽快结束,调整红灯时间为缓冲时间tc。
[0077]
在tc时间后,排队车辆头车需加速到v
max
,根据线性跟驰模型计算得出,在时间t1后整体非紧急车辆车队速度提升为v
max
,车队尾车前进距离为d1。
[0078]
为避免紧急车辆与前车的碰撞概率,在tc t1时间内,紧急车辆行驶速度应满足:
[0079][0080]
在tc t1时间后,紧急车辆可以加速至最大车速v
max
。
[0081]
当紧急车辆通过当前交叉口后,交叉口rsu发送信息通知紧急车辆行驶方向的下游交叉口,紧急车辆在驶出交叉口后继续与下一交叉口进行通信交互。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。