旋转合像棱镜法获得晶粒双面准等光程成像检测装置
1.技术领域:
2.本实用新型属于光学检测和机器视觉领域,尤其涉及一种旋转合像棱镜法获得晶粒双面准等光程成像检测装置。
3.
背景技术:
4.传统的机器视觉光学检测装置主要包含相机、成像镜头、照明光源、图像处理算法软件、电气控制、机械结构、待测物体(如半导体晶粒)等;由光源照明物体,物体通过光学成像镜头在ccd探测器面上获得物体的像,经图像采集卡,a-d转换模块将图像传输至计算机,最后通过数字图像处理技术获得所需图像信息,根据像素分布,亮度,颜色等信息,进行尺寸,形状,颜色的判别与测量,进而控制现场的设备操作。
5.如果要同时检测单个物体的两个面,目前通用的检测方法都是一个相机占用一个工位检测一个面,如果需要同时检测两个面或以上,就需要采用多个相机占用多个工位检测,这样就造成机构安装空间大,同时需要多套机构安装模组,多套电路模组,增加了安装复杂性,降低了系统可靠性。
6.基于单镜头单面检测技术的传统机器视觉光学检测装置存在检测效率、性价比、结构复杂等经济技术局限性;申请人提出了半导体晶粒双面同时检测的光学装置与方法,如下几种装置和方法:
7.如图1所示,专利申请号202010203153.1提出一种基于不同色光同时对物体(半导体晶粒)侧面与底面两个相邻表面进行光学检测的装置及方法;如图2所示,专利申请号202010566382.x提出一种基于双光楔棱镜同时对物体(半导体晶粒)天面与侧面两个相邻表面进行光学检测的装置及方法。
8.但上述几种装置和方法还具有一定不足:一个检测相机对半导体晶粒两个面同时检测时通常会遇到以下两个问题:(1)双面检测不等光程问题,即由于双面检测系统的两支光路使用不同数量的光学元件,两面检测光路的物方光程不相等,从而导致对成像镜头景深要求提高的问题。(2)双面检测不等照度问题,即由于双面检测系统的两支光路虽然可以获得物方的等光程成像,但是由于两支光路经过不同数量的光学元件,不同次数的反射与折射,两支强度相等的光束到达晶粒待测表面时的照明照度将不同,从而给双面缺陷同时检测造成图像处理的困难。
9.专利申请号202010203153.1提出一种基于双色分离成像法的半导体晶粒相邻面同时完全等光程共焦成像检测的新方法,如图1所示,利用光色分离达到两面像同时检测的目的,但是只有当晶粒双面像完全重合时才能获得等光程共焦成像,尚且为了达到这一目的需要使用两个单色照明光源或两块窄带滤光镜或,增加了装置的复杂性;专利申请号202010566382.x提出了在双面成像光路加入玻璃光楔达到双面等光程分离成像的目的。该方法增加使用了两个玻璃光楔,一定程度上降低了两面的光照强度,增加了装置的复杂性。
10.
技术实现要素:
11.本实用新型申请提出一种旋转合像棱镜法获得晶粒双面准等光程成像检测装置,该装置减少了光学元件使用的数量,简化了检测装置的光学装配,降低了检测装置的成本。
12.本实用新型旋转合像棱镜法获得晶粒双面准等光程成像检测装置,其特征在于:包括在光路方向上依次设置的cmos或ccd相机、远心成像镜头、立方分束合像器、半导体晶粒和用于承置半导体晶粒的玻璃载物台,在半导体晶粒与立方分束合像器之间的光路上分别设有天面直角转像棱镜和侧面直角转像棱镜,侧面直角转像棱镜和天面直角转像棱镜分别位于半导体晶粒的正侧部和天面正上方,立方分束合像器与天面直角转像棱镜在同一水平高度;侧面直角转像棱镜与立方分束合像器位于同一竖向上,立方分束合像器相对旋转,以使立方分束合像器的第一面与侧面直角转像棱镜的第一直角面倾斜相对,侧面直角转像棱镜的第二直角面与半导体晶粒侧面正对,侧面直角转像棱镜的斜面与远心成像镜头光轴倾斜设置;立方分束合像器的第二面与天面直角转像棱镜的第一直角面倾斜相对,天面直角转像棱镜的第二直角面与半导体晶粒侧面正对;立方分束合像器第二面相背的第四面旁侧设有同轴外置照明光源,半导体晶粒的天面与侧面分别经直角转像棱镜、立方分束合像器以准等光程共焦成像在相机传感器面上,以在cmos或ccd相机上获取半导体晶粒双面各自独立的像。
13.进一步的,上述天面直角转像棱镜和侧面直角转像棱镜的反射面中心、立方分束合像器中心与半导体晶粒中心相连形成方形对称成像光路,立方分束合像器即与所述方形对称成像光路形成旋转角θ,立方分束合像器的第一面与侧面直角转像棱镜的第一直角面即倾斜θ,立方分束合像器的第二面与天面直角转像棱镜的第一直角面即倾斜θ。
14.进一步的,上述天面直角转像棱镜和侧面直角转像棱镜均是三角形直角棱镜。
15.进一步的,上述立方分束合像器是立方合像器,或是由两块三角形直角棱镜的斜面上镀制分光膜,并使两块直角反射棱镜的斜面胶合而成。
16.进一步的,上述同轴外置照明光源是单色光,或是具有一定光谱带宽的准单色光源或白光。
17.本实用新型旋转立方分束合像器法获得晶粒双面“准”等光程成像检测装置,通过旋转一定角度的立方分束合像器达到使双面“准”等光程成像,减少了元器件使用的数量,简化了装配的难度,降低了检测装置成本。
18.附图说明:
19.图1是申请人的一种现有公开技术;
20.图2是申请人的另一种现有公开技术;
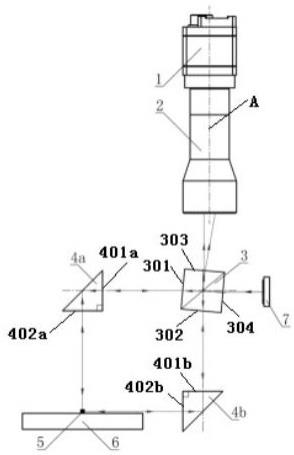
21.图3是本实用新型旋转立方分束合像器法获得晶粒双面“准”等光程成像检测装置。
22.图4是本实用新型立方分束合像器旋转示意图;
23.图5是本实用新型立方分束合像器旋转点坐标示意图;
24.图6是本实用新型双面像成像等效示意图;
25.图7是本实用新型本实用新型装置相应尺寸实施例示意图。
26.具体实施方式:
27.如图6所示,本实用新型旋转合像棱镜法获得晶粒双面准等光程成像检测装置包括在光路方向上依次设置的cmos或ccd相机1、远心成像镜头2、立方分束合像器3、半导体晶粒5和用于承置半导体晶粒的玻璃载物台6,在半导体晶粒5与立方分束合像器3之间的光路上分别设有天面直角转像棱镜4a和侧面直角转像棱镜4b,侧面直角转像棱镜4b和天面直角
转像棱镜4a分别位于半导体晶粒的正侧部和天面正上方,立方分束合像器3与天面直角转像棱镜4a在同一水平高度;侧面直角转像棱镜4b与立方分束合像器3位于同一竖向上,立方分束合像器相对旋转,以使立方分束合像器的第一面301与侧面直角转像棱镜4b的第一直角面401b倾斜相对,侧面直角转像棱镜的第二直角面402b与半导体晶粒侧面正对,侧面直角转像棱镜的斜面403b与远心成像镜头光轴a倾斜设置;立方分束合像器的第二面302与天面直角转像棱镜4a的第一直角面401a倾斜相对,天面直角转像棱镜的第二直角面402a与半导体晶粒侧面正对;立方分束合像器第二面相背的第四面304旁侧设有同轴外置照明光源7,半导体晶粒的天面与侧面分别经直角转像棱镜、立方分束合像器以准等光程共焦成像在相机传感器面上,以在cmos或ccd相机上获取半导体晶粒双面各自独立的像。
28.进一步的,上述天面直角转像棱镜和侧面直角转像棱镜的反射面中心、立方分束合像器中心与半导体晶粒中心相连形成方形对称成像光路,立方分束合像器即与所述方形对称成像光路形成旋转角θ,立方分束合像器的第一面与侧面直角转像棱镜的第一直角面即倾斜θ,立方分束合像器的第二面与天面直角转像棱镜的第一直角面即倾斜θ。
29.进一步的,上述同轴外置照明光源是单色光,或是具有一定光谱带宽的准单色光源或白光。
30.立方分束合像器也可以称为立方分束合像器/合像器、立方合像器,是一种常见的光学器件,可在一块直角棱镜的斜面上镀制透射与反射比为50%:50%的分光膜,两块直角反射棱镜的斜面胶合而成。
31.1.双面照明光路:
32.同轴外置照明光源7经过立方分束合像器3时被分为两束照明光束:一束光经天面直角转像棱镜4a后照明位于玻璃载物转盘6上的待测半导体晶粒5的侧面;而另一束照明光束经侧面直角转像棱镜4b后照明待测半导体晶粒5的天面,两束照明光束分别照明待测半导体晶粒5相邻的两个面。
33.2.成像检测光路:
34.被照明的待测半导体晶粒5相邻的两个面产生漫射光,半导体晶粒天面的成像光束经侧面直角转像棱镜4b入射到厚度为d的立方分束合像器3上,然后经立方分束合像器3透射抵达参考输出面(立方分束合像器第三面303)上,半导体晶粒侧面的成像光束经天面直角转像棱镜4a入射到厚度为d的立方分束合像器3上,然后经立方分束合像器3透射抵达参考输出面(立方分束合像器第三面303)上,利用点坐标形式进行相应的计算,如图6,利用数学关系可得下列点坐标:o(0,0),a(-d/2,d/2),b(d/2,d/2),c(d/2,-d/2),d(-d/2,-d/2)。
35.经过计算得下列点坐标:
36.e[d/2sin(π/4-θ),d/2cos(π/4-θ)],f[d/2sin(π/4 θ),-d/2cos(π/4 θ)],h[-d/2sin(π/4 θ),d/2cos(π/4 θ)],i[d/2/cosθ,0]
[0037]
k[d/2,-tan(θ-arcsin(sinθ/n))*(d/2/cosθ-d/2)],p[0,-d/2/cosθ]
[0038]
s[-tan(θ-arcsin(sinθ/n))*(d/2/cosθ-d/2),-d/2]
[0039]
因此可以得知直线相关直线表达式:
[0040]
直线pt:y=-1/tan(θ-arcsin(sinθ/n))x-d/2/cosθ
[0041]
直线eh:y=tanθ(x-d/2sin(π/4-θ)) d/2cos(π/4-θ)
[0042]
直线ik:y=tan(θ-arcsin(sinθ/n))*(x-d/2/cosθ)
[0043]
直线hf:y=-cos(π/4 θ)/sin(π/4 θ)*x
[0044]
因此,通过数学关系可以计算出直线pt与直线eh的交点t;由于i和u点是跟于直线hf对称的,因此可以计算出点u;根据u和l算出直线ul方程;通过直线ul和直线eh可以求出交点m,再次利用点公式计算可得线段
[0045]
tm=2d*tanβ-d*tanθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0046]
假设镜头的工作距离为l3,在通过三角形相似对比,如图7,可得
[0047]
l1=dtanβ/tanθ-d/2
ꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0048]
l2=s/2tanθ
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0049]
因此可得两面像间距,如式4(其中e指立方分束合像器3与镜头之间的距离)。
[0050]
s=(2l3 d-2e)*tanθ-2dtanβ
ꢀꢀꢀꢀ
(4)
[0051]
具体实际实施案例效果图如图7,立方分束合像器,两个反射转像棱镜的反射面中心,半导体晶粒中心相连成一个边长为d 30=45mm的方形对称光路结构,立方分束合像器与直角转向棱镜的尺寸15*15*15mm,与天面、侧面反射转像棱镜的侧边对齐,当立方棱镜未发生旋转时,则两侧光路光程差
△
=(36.84 15/1.5163 30 15/1.5163 23.375)-(36.84 15/1.5163 30 15/1.5163 23.375)=0,通过旋转立方分束合像器0.72
°
,则两面像间距s=(2*110 15-2*23.375)*tan(0.72)-2*15*tan(0.47)=2.12mm,则两侧光路光程差
△
=(36.84 15/1.5163 30-0.00059 15.00038/1.5163 23.383476)-(36.84 15/1.5163 30-0.00059 15.00038/1.5163 23.375336)=0.01mm,达到“准”等光程的目的。
[0052]
有助于理解本技术提案的技术资料:
[0053]
1.直角转像棱镜(三角形直角棱镜):光线由直角转像棱镜直角边垂直入射,在斜面上产生出射角为45度的一次反射后从另一直角边垂直出射,产生90度的转向,最后出射光线与入射光线相比,光路发生了90度的转向。
[0054]
2.景深:是指摄影镜头或其它成像系统能够获得清晰图像的成像所测定的被摄物体前后距离范围。
[0055]
3.同轴镜头:同轴照明光源与镜头一体,采用落射式照明方式。
[0056]
4.折射率公式:n1*θ=n2*β,其中n1为空气折射率为1;n2为材料折射率这里指立方分束合像器;θ指空气入射角,这里指立方分束合像器的旋转角度;β为与与入射角对应的折射角;这里的θ和β的单位是弧度。
[0057]
本实用新型旋转立方分束合像器法获得晶粒双面“准”等光程成像检测装置,通过旋转一定角度的立方分束合像器达到使双面“准”等光程成像,减少了光学元件使用的数量,简化了检测装置的光学装配,降低了检测装置的成本。
[0058]
最后应当说明的是:以上实施例仅用以说明本实用新型的技术方案而非对其限制;尽管参照较佳实施例对本实用新型进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本实用新型的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本实用新型技术方案的精神,其均应涵盖在本实用新型请求保护的技术方案范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
