1.本发明涉及信息技术领域,尤其涉及一种光照角度定标装置、方法及系统。
背景技术:
2.在众多依赖多光源多角度照明的计算成像技术中,例如无透镜成像(lensless imaging)、傅里叶叠层成像(fourier ptychography imaging)、编码叠层成像(coded ptychography)以及衍射断层扫描(diffraction tomography imaging),光照角度信息的准确性对成像结果的影响是至关重要的,光照角度的误差可能会降低计算成像重建图像的质量。目前主要通过照明光源的空间几何位置确定光照角度,但是光照角度的定标过程复杂且成本高。
技术实现要素:
3.有鉴于此,本发明实施例的目的是提供一种光照角度定标装置、方法及系统,装置的结构和操作简单,能够准确地标定光照角度、成本低。
4.第一方面,本发明实施例提供了一种光照角度定标装置,包括透明基板,所述透明基板包括相互平行的第一表面和第二表面,所述第一表面设置有若干个第一掩膜,所述第二表面设置有若干个第二掩膜,对应位置的所述第一掩膜和所述第二掩膜满足同心关系;其中,所述第一掩膜和所述第二掩膜用于遮光。
5.可选地,所述透明基板的厚度远大于所述第一掩膜及所述第二掩膜的厚度。
6.可选地,所述第一掩膜为圆环,所述第二掩膜为圆盘,所述圆环的内径大于所述圆盘的直径。
7.可选地,所述透明基板的厚度范围为0.5mm~2.5mm。
8.可选地,所述第一掩膜及所述第二掩膜的厚度范围小于0.1um。
9.第二方面,本发明实施例提供了一种光照角度定标方法,应用于上述的装置,包括:
10.将所述装置放置于光源与图像传感器之间;所述光源用于产生一定角度的入射光,所述图像传感器用于拍摄所述入射光经过所述透明基板产生的光阴影图像;
11.在所述光阴影图像中检测若干对具有同心关系的所述第一掩膜和所述第二掩膜的阴影位置信息;
12.根据所述第一掩膜和所述第二掩膜的位置信息计算对应的位移量;
13.根据所述位移量、所述透明基板的厚度及所述透明基板的折射率计算光源的照明角度。
14.可选地,所述光源的照明角度的计算公式如下:
[0015][0016]
其中,表示照明角度,n表示所述透明基板的折射率,h表示所述透明基板的厚
度,m表示具有同心关系的第一掩膜和第二掩膜的对数,di表示第i对具有同心关系的第一掩膜和第二掩膜的位移量。
[0017]
可选地,所述方法还包括:
[0018]
根据所述第一掩膜和所述第二掩膜的光阴影位置信息计算夹角;
[0019]
根据所述位移量及所述夹角分别计算光源在两个正交平面的分量位移;
[0020]
分别根据所述光源在两个正交平面的分量位移、所述透明基板的厚度及所述透明基板的折射率计算光源在两个正交平面的照明角度。
[0021]
可选地,所述光源在两个正交平面的照明角度的计算公式如下:
[0022][0023][0024]
其中,表示第一正交平面的光照角度,表示第二正交平面的光照角度,d
ix
表示第i对具有同心关系的第一掩膜和第二掩膜在第一正交平面的分量位移,d
iy
表示第i对具有同心关系的第一掩膜和第二掩膜在第二正交平面的分量位移。
[0025]
第三方面,本发明实施例提供了一种光照角度定标系统,包括上述的装置、光源、图像传感器、检测装置及处理器;其中,
[0026]
所述光源,用于产生一定角度的入射光;
[0027]
所述图像传感器,用于拍摄所述入射光经过所述透明基板产生的光阴影图像;
[0028]
所述检测装置,用于在所述光阴影图像中检测若干对具有同心关系的所述第一掩膜和所述第二掩膜的阴影位置信息;
[0029]
所述处理器,用于根据所述第一掩膜和所述第二掩膜的位置信息计算对应的位移量,并根据所述位移量、所述透明基板的厚度及所述透明基板的折射率计算光源的照明角度。
[0030]
实施本发明实施例包括以下有益效果:本实施例中光照角度定标装置包括透明基板及透明基板上相互平行的第一表面和第二表面,第一表面设置有用于遮光的第一掩膜,第二表面设置有用于遮光的第二掩膜,第一掩膜和第二掩膜满足同心关系,入射光通过第一掩膜和第二掩膜后形成光阴影图像,根据光阴影图像的位置关系计算光源的照明角度,装置的结构和操作简单,能够准确地标定光照角度、成本低。
附图说明
[0031]
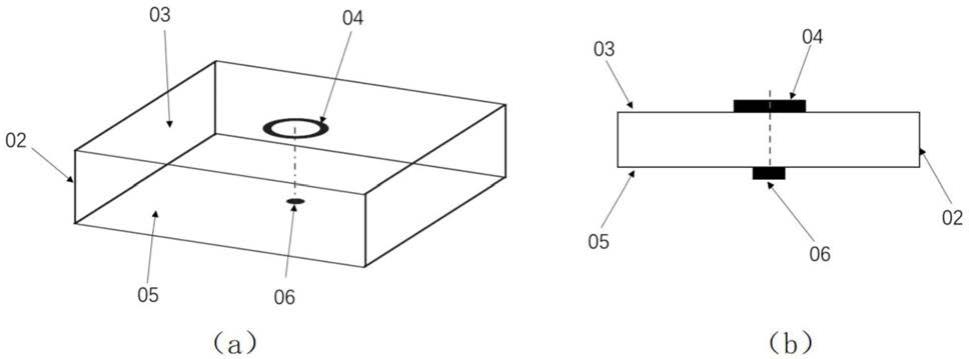
图1是本发明实施例提供的一种光照角度定标装置的结构示意图;
[0032]
图2是本发明实施例提供的一种光照角度定标方法的步骤流程示意图;
[0033]
图3是本发明实施例提供的一种光照角度定标系统的结构示意图;
[0034]
图4是本发明实施例提供的一种位移量的示意图;
[0035]
图5是本发明实施例提供的另一种光照角度定标系统的结构示意图;
[0036]
图6是本发明实施例提供的另一种位移量的示意图;
[0037]
图7是本发明实施例提供的一种检测阴影位置信息的流程示意图。
具体实施方式
[0038]
下面结合附图和具体实施例对本发明做进一步的详细说明。对于以下实施例中的步骤编号,其仅为了便于阐述说明而设置,对步骤之间的顺序不做任何限定,实施例中的各步骤的执行顺序均可根据本领域技术人员的理解来进行适应性调整。
[0039]
如图1所示,图1(a)为光照角度定标装置的三维结构示意图,图1(b)为光照角度定标装置沿垂直于第一表面或第二表面的剖面示意图,其中,虚线表示圆环和圆盘的同心关系。本发明实施例提供了一种光照角度定标装置,包括透明基板02,所述透明基板02包括相互平行的第一表面03和第二表面05,所述第一表面03设置有若干个第一掩膜04,所述第二表面05设置有若干个第二掩膜06,对应位置的所述第一掩膜04和所述第二掩膜06满足同心关系;其中,所述第一掩膜04和所述第二掩膜06用于遮光。
[0040]
本领域技术人员可以理解的是,透明基板的具体物质由具有应用确定,如透明玻璃或两个相同材质的透明单面掩膜板叠层构成等,本实施例不做具体限制。
[0041]
需要说明的是,第一掩膜或第二掩膜的具体物质由具有应用确定,如金属或不透明有机物等,本实施例不做具体限制。
[0042]
可选地,所述透明基板的厚度远大于所述第一掩膜及所述第二掩膜的厚度。
[0043]
可选地,所述透明基板的厚度范围为0.5mm~2.5mm。
[0044]
可选地,所述第一掩膜及所述第二掩膜的厚度范围小于0.1um。
[0045]
需要说明的是,透明基板的厚度、第一掩膜及第二掩膜的厚度根据具体应用确定,本实施例不做具体限制。
[0046]
可选地,所述第一掩膜为圆环,所述第二掩膜为圆盘,所述圆环的内径大于所述圆盘的直径。
[0047]
实施本发明实施例包括以下有益效果:本实施例中光照角度定标装置包括透明基板及透明基板上相互平行的第一表面和第二表面,第一表面设置有用于遮光的第一掩膜,第二表面设置有用于遮光的第二掩膜,第一掩膜和第二掩膜满足同心关系,入射光通过第一掩膜和第二掩膜后形成光阴影图像,根据光阴影图像的位置关系计算光源的照明角度,装置的结构和操作简单,能够准确地标定光照角度、成本低。
[0048]
参阅图2,本发明实施例提供了一种光照角度定标方法,应用于上述的装置,包括:
[0049]
s100、将所述装置放置于光源与图像传感器之间;所述光源用于产生一定角度的入射光,所述图像传感器用于拍摄所述入射光经过所述透明基板产生的光阴影图像。
[0050]
具体地,参阅图3(a),将光照角度定标装置01放置于光源07与图像传感器08之间,使得光照角度定标装置01的圆环图案和圆盘图案投影到图像传感器的靶面上,获取相应的阴影图像09,阴影图像09如图3(b)所示,图3(a)中的光照角度为垂直照射。
[0051]
s200、在所述光阴影图像中检测若干对具有同心关系的所述第一掩膜和所述第二掩膜的阴影位置信息。
[0052]
参阅图4,以一对图案为例,当光源07的光以光照角度从光照角度定标装置的第一表面入射时,圆环图案会在第二掩膜上形成一个投影,该投影与圆环图案在第一掩膜上的位置间存在着一个包含光源照明信息的水平位移量z。
[0053]
s300、根据所述第一掩膜和所述第二掩膜的位置信息计算对应的位移量。
[0054]
参阅图3,当光源发射的光线垂直光照角度定标装置的第一表面入射时,圆环图案
和圆盘图案在图像传感器靶面形成各自的阴影,此时两种图案的阴影依旧是共心的。参阅图5,当光源发射的光线以非垂直角入射光照角度定标装置的第一表面时,由于透明基板存在一定厚度,圆环图案到图像传感器的距离与圆盘图案到图像传感器的距离并不相同,因此,圆环图案和圆盘图案在图像传感器表面的阴影不再共心,圆环图案的阴影中心到圆盘图案的阴影中心的位移为阴影位移d,如图4所示。
[0055]
参阅图6,由光线传播原理可知,在光源照明下,圆环图案和圆盘图案在阴影图像中的阴影位移d就等于所述位移量z。
[0056]
具体地,利用公开的圆形检测算法,如基于hough变换原理的圆形检测算法cht(circular hough transform),在阴影图像中对圆环图案和圆盘图案进行位置检索,得到m对图案在阴影图像中的位置信息,从而计算出m对图案对应的阴影位移量di(1≤i≤m)。
[0057]
s400、根据所述位移量、所述透明基板的厚度及所述透明基板的折射率计算光源的照明角度。
[0058]
可选地,所述光源的照明角度的计算公式如下:
[0059][0060]
其中,表示照明角度,n表示所述透明基板的折射率,h表示所述透明基板的厚度,m表示具有同心关系的第一掩膜和第二掩膜的对数,di表示第i对具有同心关系的第一掩膜和第二掩膜的位移量,i的取值范围为1~m。
[0061]
可选地,所述光照角度定标方法还包括:
[0062]
s500、根据所述第一掩膜和所述第二掩膜的光阴影位置信息计算夹角;
[0063]
s600、根据所述位移量及所述夹角分别计算光源在两个正交平面的分量位移;
[0064]
s700、分别根据所述光源在两个正交平面的分量位移、所述透明基板的厚度及所述透明基板的折射率计算光源在两个正交平面的照明角度。
[0065]
可选地,所述光源在两个正交平面的照明角度的计算公式如下:
[0066][0067][0068]
其中,表示第一正交平面的光照角度,表示第二正交平面的光照角度,d
ix
表示第i对具有同心关系的第一掩膜和第二掩膜在第一正交平面的分量位移,d
iy
表示第i对具有同心关系的第一掩膜和第二掩膜在第二正交平面的分量位移。
[0069]
参阅图7,其中,图7(b)至图7(d)表示利用cht算法定位圆环和圆盘图案的示意图,从阴影图像中可以得到每对图案阴影的中心位置信息,从其中任一个中心连接另一个中心形成一个向量,同时将此向量的方向称作第一方向。根据矢量正交分解原理,第一方向可以分解成两个相互垂直的方向,分别称为第二方向x和第三方向y,其中第二方向和第一方向成第一角度θ。因此,阴影位移di能够分解出关于第二方向x和第三方向y的分量,分别为d
ix
和d
iy
,分别为d
ix
=di*cosθ,d
iy
=di*sinθ。根据上述公式可以得到光源在两个正交平面上的照明角度和
[0070]
可见,上述装置实施例中的内容均适用于本方法实施例中,本方法实施例所具体实现的功能与上述装置实施例相同,并且达到的有益效果与上述装置实施例所达到的有益效果也相同。
[0071]
另外,本发明实施例提供了一种光照角度定标系统,包括上述的装置、光源、图像传感器、检测装置及处理器;其中,
[0072]
所述光源,用于产生一定角度的入射光;
[0073]
所述图像传感器,用于拍摄所述入射光经过所述透明基板产生的光阴影图像;
[0074]
所述检测装置,用于在所述光阴影图像中检测若干对具有同心关系的所述第一掩膜和所述第二掩膜的阴影位置信息;
[0075]
所述处理器,用于根据所述第一掩膜和所述第二掩膜的位置信息计算对应的位移量,并根据所述位移量、所述透明基板的厚度及所述透明基板的折射率计算光源的照明角度。
[0076]
可见,上述装置实施例中的内容均适用于本系统实施例中,本系统实施例所具体实现的功能与上述装置实施例相同,并且达到的有益效果与上述装置实施例所达到的有益效果也相同。
[0077]
以上是对本发明的较佳实施进行了具体说明,但本发明创造并不限于所述实施例,熟悉本领域的技术人员在不违背本发明精神的前提下还可做作出种种的等同变形或替换,这些等同的变形或替换均包含在本技术权利要求所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
