1.本公开总体上涉及半导体领域,并且更具体地,涉及用于磁阻传感器的芯片上轮间距识别的方法。
背景技术:
2.磁性速度传感器被用于许多行业的许多应用的速度感测,包括汽车行业中的轮速、引擎转速和变速箱转速等。在速度感测领域中,可通过磁性传感器响应于目标对象(诸如车轮、凸轮轴、曲轴等)的旋转而生成正弦信号。正弦信号可转换为脉冲,脉冲被进一步转换为移动检测或速度输出。
3.来自速度传感器的信息可生成速度信号和方向信号,从速度信号中可提取目标对象的速度,并且方向信号与速度信号组合给出目标对象的移动的旋转方向。因此,速度传感器可生成速度信号和方向信号。基于这些信号中的一个或两个,生成附加的输出信号(例如,脉冲输出信号),向使用脉冲输出信号的微控制器提供传感器信息。
4.传感器元件间距是沿着目标对象的旋转方向布置的两个磁场传感器元件之间的横向中心距。
5.极轮的间距是指在相同极性的两个相邻极之间(即,两个相邻正极或两个相邻负极之间)的沿间距圆的中心距。相同极性的两个相邻极之间插入一个相反极性的极。因此,极轮的半间距是沿不同(即,相反)极性的两个相邻极之间的间距圆的中心距。换句话说,半间距是沿间距圆的、正极中心和与正极相邻的负极中心之间的距离。
6.为了良好的系统性能,传感器集成电路(ic)的传感器元件间距和轮半间距应相互匹配(1:1)。换句话说,传感器元件间距应为轮间距的一半(1:2)。该比率提供了改进的信噪比。不幸地,这并不总是可能的,因为一个传感器ic可以针对使用具有不同轮间距的不同轮的不同平台设计。如果传感器元件间距和轮半间距不匹配,则性能可能下降。
7.因此,可能期望一种改进的磁场传感器,其能够确定轮间距并基于此执行补偿。
技术实现要素:
8.实施例提供了一种传感器设备,包括:第一传感器布置,包括多个第一传感器元件,该多个第一传感器元件被配置为基于感测由具有极轮间距的极轮生成的变化磁场来生成第一传感器信号,其中第一传感器信号表示限定第一测量值的第一差分信号;第二传感器布置,包括至少一个第二传感器元件,该至少一个第二传感器元件被配置为基于感测由极轮生成的变化磁场来生成至少一个第二传感器信号,其中至少一个第二传感器信号限定相对于第一测量值相移的第二测量值;第一放大器电路,被配置为接收和放大第一传感器信号,以生成放大的第一传感器信号;第二放大器电路,被配置为接收和放大至少一个第二传感器信号,以生成至少一个放大的第二传感器信号;以及传感器电路,被配置为将放大的第一传感器信号转换为具有第一测量值的第一差分信号,并将至少一个放大的第二传感器信号转换为具有第二测量值的测量信号。传感器电路包括信号处理器,信号处理器被配置
为基于第一测量值和第二测量值检测极轮间距,并且基于所检测的极轮间距调整第二放大器电路的增益设置。
9.实施例进一步提供了一种传感器设备,包括:第一传感器布置,包括多个第一传感器元件,该多个第一传感器元件被配置为基于感测由具有极轮间距的极轮生成的变化磁场来生成第一传感器信号,其中第一传感器信号表示限定第一测量值的第一差分信号;第二传感器布置,包括至少一个第二传感器元件,该至少一个第二传感器元件被配置为基于感测由极轮生成的变化磁场来生成至少一个第二传感器信号,其中至少一个第二传感器信号限定相对于第一测量值相移的第二测量值;第一放大器电路,被配置为接收和放大第一传感器信号,以生成放大的第一传感器信号;第二放大器电路,被配置为接收和放大至少一个第二传感器信号,以生成至少一个放大的第二传感器信号;以及传感器电路,被配置为将放大的第一传感器信号转换为具有第一测量值的第一差分信号,并将至少一个放大的第二传感器信号转换为具有第二测量值的测量信号。传感器电路包括信号处理器,信号处理器被配置为将第一测量值和第二测量值的组合与多个增益设置中的对应增益设置相关联,基于第一测量值和第二测量值的组合,从多个增益设置中选择对应增益设置,并且将所选择的对应增益设置设置为第二放大器电路的增益设置。
10.实施例进一步提供了一种用于基于极轮的极轮间距校准磁场传感器电路的方法。该方法包括:通过第一传感器布置,基于感测由极轮生成的变化磁场来生成第一传感器信号,其中第一传感器信号表示限定第一测量值的第一差分信号;通过第二传感器布置,基于感测由极轮生成的变化磁场来生成至少一个第二传感器信号,其中至少一个第二传感器信号限定相对于第一测量值相移的第二测量值;通过第一放大器电路,放大第一传感器信号,以生成放大的第一传感器信号;通过第二放大器电路,放大至少一个第二传感器信号,以生成至少一个放大的第二传感器信号;通过传感器电路,将放大的第一传感器信号转换为具有第一测量值的第一差分信号;通过传感器电路,将至少一个放大的第二传感器信号转换为具有第二测量值的测量信号;通过传感器电路,将第一测量值和第二测量值的组合与多个增益设置中的对应增益设置相关联;通过传感器电路,基于第一测量值和第二测量值的组合从多个增益设置中选择对应增益设置;以及通过传感器电路,将所选择的对应增益设置设置为第二放大器的增益设置。
附图说明
11.本文参考附图描述实施例。
12.图1a示出了根据一个或多个实施例的使用极轮的磁场感测原理;
13.图1b和图1c示出了根据一个或多个实施例的间距匹配原理;
14.图2是示出根据一个或多个实施例的磁性速度传感器的示意框图;
15.图3a是根据一个或多个实施例的具有前置放大器的第一传感器布置的示意图;
16.图3b是根据一个或多个实施例的具有前置放大器的第二传感器布置的示意图;以及
17.图3c示出了根据一个或多个实施例的磁性速度传感器的速度传感器布置和方向传感器布置的示意框图。
具体实施方式
18.以下,阐述细节以提供对示例性实施例更彻底的解释。然而,本领域技术人员将明白,实施例可以在没有这些具体细节的情况下实施。在其它实例中,以框图形式或示意图而非详细地示出已知结构和设备,以避免混淆实施例。此外,除非另有特别说明,否则下文描述的不同实施例的特征可相互组合。还应理解,可以利用其他实施例,并且可以在不脱离权利要求限定的范围的情况下进行结构或逻辑改变。因此,以下详细描述不具有局限性。
19.此外,在以下描述中,用等效或类似的附图标记表示具有等效或类似功能的等效或类似元件。由于相同或功能等效的元件在附图中具有相同的附图标记,因此可以省略对具有相同附图标记的元件的重复描述。因此,为具有相同或相似附图标记的元件提供的描述可相互交换。
20.方向术语(诸如“顶部”、“底部”、“上方”、“下方”、“前方”、“后方”、“头部”、“尾部”、“之上”、“之下”等)可参考所描述的附图和/或元件的方向使用。因为实施例可以多种不同的方向定位,所以方向术语用于说明的目的而不用于限制。在一些实例中,只要保持元件之间的一般方向关系及其一般目的,就可以基于实施例的定向来用等效的方向术语交换方向术语。
21.在本公开中,包括序号的表述(诸如“第一”、“第二”等)可修改各种元件。然而,这些元件不限于上述表述。例如,上述表述不限制元件的顺序和/或重要性。上述表述仅用于区分一个元件与其他元件。例如,第一框和第二框指示不同的框,尽管它们都是框。进一步例如,第一元件可称为第二元件,并且类似地,第二元件也可以称为第一元件,而不脱离本公开的范围。
22.应理解,当一个元件被称为“连接”或“耦合”到另一元件时,其可以直接连接或耦合到另一元件,或者可以存在中间元件。相反,当一个元件被称为与另一元件“直接连接”或“直接耦合”时,不存在中间元件。用于描述元件之间关系的其他词语应以类似方式解释(例如,“之间”与“直接之间”、“相邻”与“直接相邻”等)。
23.在本文描述或附图所示的实施例中,任何直接电气连接或耦合(即,没有额外中间元件的任何连接或耦合)也可通过间接连接或耦合(即,与一个或多个额外中间元件的连接或耦合)实施,反之亦然,只要基本上保持连接或耦合的一般目的即可,例如特定种类的信号或或者传输特定种类的信息。可以组合来自不同实施例的特征以形成进一步的实施例。例如,除非另有相反说明,否则关于一个实施例描述的变化或修改也可适用于其他实施例。
24.根据特定实施要求,存储介质可包括ram、rom、prom、eprom、eeprom、闪存或任何其他存储有电子可读控制信号的介质,这些介质与可编程计算机系统相互配合(或能够相互配合)以执行相应方法。因此,可将存储介质视为计算机可读的非暂态存储介质。
25.此外,指令可由一个或多个处理器执行,诸如一个或多个中央处理单元(cpu)、数字信号处理器(dsp)、通用微处理器、专用集成电路(asic)、现场可编程逻辑阵列(fpga)或其他等效的集成或离散逻辑电路。因此,本文使用的术语“处理器”是指上述结构中的任何一种或者适合于实施本文所述技术的任何其他结构。此外,在一些方面中,本文描述的功能性可在专用硬件和/或软件模块内提供。此外,这些技术可以在一个或多个电路或逻辑元件中完全实施。“控制器”(包括一个或多个处理器)可使用电信号和数字算法来执行其接收、分析和控制功能,其还可包括校正功能。
26.传感器可指将待测物理量转换为电信号(例如,电流信号或电压信号)的部件。例如,物理量可包括磁场、电场、压力、力、温度、电流或电压,但不限于此。如本文所述,传感器设备可以是电压传感器、电流传感器、温度传感器、磁性传感器等。
27.例如,磁场传感器包括一个或多个磁场传感器元件,用于测量磁场的一个或多个特性(例如,磁场通量密度、磁场强度、磁场角度、磁场方向、磁场方向等)。磁场可由磁体、载流导体(例如,导线)、地或其他磁场源产生。每个磁场传感器元件被配置为响应于撞击到传感器元件上的一个或多个磁场来生成传感器信号(例如,电压信号)。因此,传感器信号指示撞击在传感器元件上的磁场的大小和/或方向。
28.磁场传感器元件包括但不限于磁阻传感器(通常称为xmr传感器),其是各向异性磁阻(amr)、巨磁阻(gmr)、隧道磁阻(tmr)等的统称。传感器电路可被称为信号处理电路和/或信号调节电路,其以原始测量数据的形式从一个或多个磁场传感器元件接收一个或多个信号(即,传感器信号),并从传感器信号中得到表示磁场的测量信号。
29.在一些情况下,测量信号可以是差分测量信号,该信号由具有相同感测轴的两个传感器元件(例如,对相同磁场分量敏感的两个传感器元件)使用差分法从传感器信号中得出。差分测量信号对同质外部杂散磁场具有鲁棒性。
30.如本文所使用的,信号调节是指以信号满足下一阶段进一步处理要求的方式来处理模拟信号。信号调节可包括从模拟到数字的转换(例如,经由模数转换器)、放大、滤波、转换、偏置、范围匹配、隔离以及使传感器输出适合调节后处理所需的任何其他处理。
31.因此,传感器电路可包括一个模数转换器(adc),其将来自一个或多个传感器元件的模拟信号转换为数字信号。传感器电路还可以包括对数字信号执行一些处理的数字信号处理器(dsp),这将在下文中进行讨论。因此,也可以称为集成电路(ic)的芯片可包括经由信号处理和/或调节来调节和放大一个或多个磁场传感器元件的小信号的电路。
32.如本文所使用的,传感器设备可指包括如上所述的传感器和传感器电路的设备。传感器设备可集成在单个半导体裸片(例如,硅裸片或芯片)上。因此,传感器和传感器电路被设置在同一半导体裸片上。
33.本文提供的磁场传感器可配置用于旋转磁性编码器(诸如轮或凸轮轴,被称为目标对象或目标轮)的速度测量和旋转方向测量。磁场传感器也可以测量一个磁周期与360度相关的磁相位。
34.一种类型的磁性编码器是由交变磁体组成的极轮,其中交变磁体沿相反方向磁化(例如,交变南极和北极磁体),并沿编码器的圆周布置。在这种情况下,速度传感器被置于极轮的前面或侧面,其中传感器模块和极轮之间的距离由气隙确定。传感器模块检测所测量的磁场是否改变其极性。在这种情况下,速度传感器生成指示有极经过的输出信号。
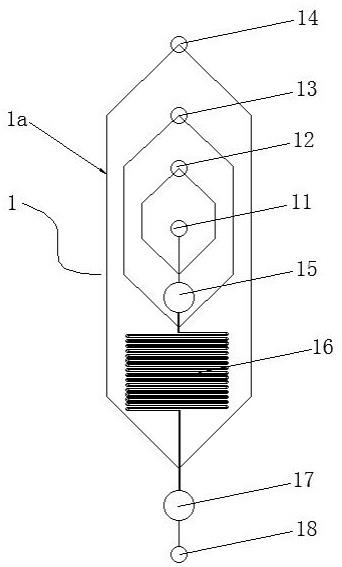
35.图1a示出了根据一个或多个实施例的使用极轮的磁场感测原理。
36.传感器模块1是速度传感器,其包括第一传感器元件布置和传感器电路(未显示)。第一传感器元件布置是包括两个差分磁场传感器元件se1和se2的第一感测结构。每个差分传感器元件se1和se2的传感器信号被提供给传感器电路,该传感器电路使用差分计算来计算差分测量信号,该差分计算可用于抵消传感器平面方向上的均匀杂散场。传感器元件间距是沿目标对象(即,极轮11)的旋转方向布置的两个磁场传感器元件se1和se2之间的横向中心距。
37.传感器布置被配置为感测由极轮11产生的磁场。传感器布置在本文通常被称为速度传感器布置,并且可进一步包括传感器电路(未示出)且可设置在传感器封装中。
38.极轮11是磁化编码器轮,其包括交替的北极段12和南极段13。传感器元件se1和se2对极轮11的北极段12和南极段13影响的磁场敏感。极轮的间距是在相同极性的两个相邻极之间(即,两个相邻正极或两个相邻负极之间)沿间距圆的中心距。相同极性的两个相邻极之间插入一个相反极性的极。因此,极轮的半间距是不同(即,相反)极性的两个相邻极之间沿间距圆的中心距。换句话说,半间距是在正极的中心和与正极相邻的负极的中心之间沿间距圆的距离。
39.为了良好的系统性能,传感器集成电路(ic)的传感器元件间距和轮半间距应相互匹配(1:1)。换句话说,传感器元件间距应为轮间距的一半(1:2)。该比率提供了改进的信噪比。
40.在实践中,传感器元件se1和se2均可具有沿x方向对齐的灵敏度轴,使得它们对极轮产生的磁场的x分量bx敏感。由于它们的灵敏度轴与磁场的x分量bx对齐,所以传感器元件se1和se2生成代表x分量bx大小或与x分量bx大小成比例的电信号。当极轮11绕其旋转轴14旋转时,通过检测由经过传感器布置的交替北极和南极产生的交变磁场的变化,传感器布置的传感器电路生成与磁化编码器轮11的转速相对应的传感器输出。
41.当极轮11旋转时,正极12和负极13交替经过传感器模块1,并且传感器布置内的传感器元件感测到x轴或y轴磁场强度的变化,该变化为正弦波形(即,信号调制),其频率对应于轮的旋转速度,并进一步对应于驱动轮旋转的驱动轴(例如,凸轮轴)的旋转速度。
42.因此,传感器布置的传感器电路接收来自磁场传感器元件se1和se2的信号(即,传感器信号),并从传感器信号中得出表示磁场为信号调制的差分测量信号。然后,差分测量信号可作为输出信号输出到外部控制器、控制单元或处理器(例如,ecu),或者在输出到外部设备之前被传感器电路内部用于进一步处理(例如,生成脉冲输出信号)。例如,外部设备可对脉冲输出信号的脉冲进行计数,并由此计算轮速。差分测量信号可以被称为速度信号,从中可以提取目标对象的速度。
43.此外,传感器模块1可包括作为第二感测结构的第二传感器布置,其用于生成与速度信号组合指示极轮11旋转方向(例如,顺时针或逆时针)的方向信号。这里,第二感测结构由单个单单元(monocell)传感器元件se3(即,第三磁场传感器元件)组成,其被布置在第一感测结构的两个差分传感器元件se1和se2之间,以使传感器能够检测轮11的旋转方向。传感器元件se3还可以具有沿x方向对齐的灵敏度轴。
44.具体地,第一传感器布置可被配置为生成速度传感器信号,并且第二传感器布置可被配置为生成相对于速度传感器信号相移90
°
或大致相移90
°
的方向传感器信号。可通过传感器电路评估速度信号和方向信号之间的相移,并且可以基于相移是正还是负来确定目标对象的旋转方向。例如,差分传感器元件se1和se2可用于生成正弦速度信号,并且第三传感器元件se3可用于生成相对于速度信号相移90
°
的正弦(余弦)方向信号。通过监控相移的方向(例如,正或负),传感器电路可确定磁场的旋转方向,并由此确定目标对象的旋转方向。
45.虽然第二感测结构被示为由单单元传感器元件形成,但应了解,第二感测结构还可包括用于生成差分传感器信号的多个传感器元件,该差分传感器信号相对于速度传感器
信号(其也是差分信号)相移90
°
或基本上相移90
°
。相移是由传感器元件(例如,se1、se2和se3)相对于彼此的几何位置引起的。
46.此外,应了解,第一传感器布置可包括两个或更多个用于生成速度传感器信号的传感器元件,而第二传感器布置可包括一个或多个用于生成方向传感器信号的传感器元件。在传感器布置包括两个或更多个感测元件的情况下,每个相应传感器布置的感测元件可以差分配置和/或桥接配置来布置。例如,用于生成速度传感器信号的传感器元件可包括以桥接配置布置的四个或更多个传感器元件,该配置将速度传感器信号输出作为第一差分信号。类似地,用于生成方向传感器信号的传感器元件可包括以桥接配置布置的四个或更多个传感器元件,该配置将方向传感器信号输出作为第二差分信号。
47.图1b-图1c示出了根据一个或多个实施例的间距匹配原理。如上所讨论的,图1a示出了磁化编码器轮11和具有与极轮半间距1:1匹配的传感器元件间距的第一传感器布置(se1和se2)。
48.图1b示出了在间距理想匹配的情况下(即,传感器元件间距与极轮半间距匹配)由磁化编码器轮11生成并投射到轮速传感器上的振荡磁场的曲线。可以看出,差分传感器信号的峰间振幅(bdiff,max)等于轮速传感器处可感测的磁场的x分量bx最大振幅的两倍(例如,基于轮速传感器和轮之间的恒定气隙)。在这种情况下,峰间振幅是传感器可检测到的最大值。
49.图1c示出了在间距不匹配的情况下(即,传感器元件间距与极轮半间距不匹配)由磁化编码器轮11生成并投射到轮速传感器上的振荡磁场的曲线。可以看出,差分传感器信号的峰间振幅(bdiff,max)相对于图1b所示的峰间振幅减小。因此,如果不是由于间距失配,图1c中的峰间振幅小于可在轮速传感器处感测到的磁场的x分量bx的最大振幅的两倍(例如,基于轮速传感器和轮之间的恒定气隙)。
50.描述能够确定轮间距并基于确定的轮间距或半间距对传感器信号执行补偿的进一步实施例。对于速度传感器(诸如防抱死制动系统(abs)速度传感器),还存在方向检测。速度传感器信号和方向传感器信号通过传感器电路(例如,包括adc)转换为数字信号(即,数字值),并且传感器电路进一步被配置为经由查找表、通过除以两个值并在查找表中进行检查或者通过一些其他算法来确定轮间距。
51.图2是示出根据一个或多个实施例的磁性速度传感器100的示意框图。磁性速度传感器100包括传感器布置s和传感器布置d,它们各自被配置为响应于撞击于其上的磁场来生成差分传感器信号。具体地,传感器布置s可包括以桥接电路配置而布置的第一组磁场传感器元件,并且被配置为生成速度传感器信号。类似地,传感器布置d可包括以桥接电路配置而布置的第二组磁场传感器元件,并且用于生成相对于速度传感器信号相移(例如,90
°
)的方向传感器信号。可以评估速度信号和方向信号之间的相移,并且可基于相移是正还是负来确定目标对象的旋转方向。还应理解,如上所述,传感器布置d可以是单单元磁性传感器元件(即,仅包括单个传感器元件)。当传感器布置d是单单元磁性传感器时,由单单元传感器元件生成的传感器信号被用作方向信号。
52.图2所示的传感器布置s和d可各自表示磁阻桥,该磁阻桥包括以桥接配置来布置的传感器元件的对应集合。传感器布置s的传感器元件被配置为根据相同的感测平面(例如,x平面、y平面或z平面)测量磁场。类似地,传感器布置d的传感器元件被配置为根据相同
的感测平面(例如,x平面、y平面或z平面)测量磁场。即,组成桥的传感器元件具有与同一感测平面对齐的参考方向。
53.磁性速度传感器100还包括传感器电路20,该传感器电路从传感器布置s和d接收传感器信号,用于处理并在输出out处生成脉冲输出速度信号和方向指示信号。传感器电路20包括两条信号路径:s信号路径和d信号路径。s信号路径上的差分速度(s)信号可以是表示目标对象的旋转速度的正弦(sine)波形的形式,并且d信号路径上的差分方向(d)信号可以是相对于速度信号相移(例如,90
°
)的类似波形。例如,方向信号可以是表示目标对象的旋转速度的余弦波形,但是被数字信号处理器27用于通过分析速度信号和方向信号之间的相位差来确定旋转方向。
54.信号路径s和d可各自包括前置放大器asp 21和adir 22、差分比较器23和24,这两个比较器将各自的差分信号输出到相应的adc 25和26。
55.传感器布置s生成差分传感器信号,这些信号之间具有差分测量值,诸如电压差vdiff,speed。前置放大器asp 21根据设定的增益放大这些差分传感器信号,并将放大的差分传感器信号提供给差分比较器23。差分比较器23将差分传感器信号转换为具有等于电压差vdiff,speed的值的模拟差分测量信号。adc 25将模拟差分测量信号转换为数字域,具体地,转换为表示电压差vdiff,speed的数字差分测量信号。
56.类似地,传感器布置d生成至少一个传感器信号。在传感器布置d为单单元布置的情况下,提供信号传感器元件以生成相对于速度信号路径的模拟差分测量信号相移90
°
的传感器信号。在这种情况下,将不需要差分比较器24。代替地,前置放大器adir 22根据设定的增益放大从传感器布置d接收的传感器信号,并且adc 26将放大的传感器信号转换为数字域。因此,信号处理器27接收来自速度路径的第一数字信号和来自方向路径的第二数字信号(其相对于第一数字信号相移预定相移(例如,90
°
))。
57.备选地,传感器布置d可生成差分传感器信号,例如经由桥接布置,其中,差分传感器信号之间具有差分测量值,诸如电压差vdiff,dir。前置放大器asp 22根据设定的增益放大这些差分传感器信号,并将放大的差分传感器信号提供给差分比较器24。差分比较器24将差分传感器信号转换为具有等于电压差vdiff,dir的值的模拟差分测量信号。adc 26将模拟差分测量信号转换为数字域,具体地,转换为代表电压差vdiff,dir的数字差分测量信号。因此,信号处理器27接收来自速度路径的第一数字信号(即,数字速度信号dsp)和来自方向路径的第二数字信号(即,数字方向信号ddir),第二数字信号相对于第一数字信号相移预定相移(例如,90
°
)。
58.数字信号处理器27被配置为接收数字速度信号和数字方向信号以进行进一步处理,包括确定目标对象的速度和旋转方向。此外,信号处理器27被配置为基于速度信号和方向信号自动确定轮间距,并且基于确定的轮间距进一步补偿或调节速度信号和/或方向信号。例如,数字信号处理器23可包括执行各种信号调节功能的一个或多个处理器和/或逻辑单元,诸如绝对信号转换、标准化、线性化、频率增加等。可与存储在存储器中的查找表组合来执行一个或多个信号调节功能。数字信号处理器27的输出out可以向外部设备(诸如ecu)提供一个或多个输出信号。
59.例如,目标对象的旋转速度可作为速度脉冲信号输出。因此,由传感器布置s生成的正弦信号可由信号处理器27转换为脉冲,其可进一步转换为移动检测或速度输出。此外,
信号处理器27可基于评估数字速度信号和数字方向信号之间的相移来输出指示旋转方向的信号。
60.为了确定轮间距,信号处理器27评估数字速度信号dsp的振幅和数字方向信号ddir的振幅之间的差值。例如,信号处理器27可使用一个或多个查找表来评估该差值,可以使用坐标旋转数字计算机(cordic)操作来计算数字速度信号dsp和数字方向信号ddir的比率r(例如,r=dsp/ddir或r=dir/dsp),或者可以使用它们的组合。基于确定的轮间距,信号处理器27经由增益控制器28调整前置放大器adir 22的增益设置,以使比率r接近或等于1:1。换句话说,增益控制器28被配置为调整前置放大器adir 22的放大,使得数字方向信号ddir的最大和最小振幅基本上等于数字速度信号dspeed的最大和最小振幅。如此,信号处理器27使得传感器100能够自动适应不同的极轮间距,以根据图1b所示的理想间距匹配来优化信号性能。
61.图3a是根据一个或多个实施例的具有前置放大器的第一传感器布置的示意图。图3b是根据一个或多个实施例的具有前置放大器的第二传感器布置的示意图。图3c示出了根据一个或多个实施例的磁性速度传感器的速度传感器布置和方向传感器布置的示意框图。
62.具体地,第一传感器布置对应于包括以连接在第一和第二电源端子之间的第一桥接配置来布置的四个传感器元件s1-s4的传感器布置s,并且第二传感器布置对应于包括以连接在第一和第二电源端子之间的第二桥接配置来布置的六个传感器元件d1-d6的传感器布置d。应理解,传感器布置s和d不限于传感器元件的数量或所示的特定桥接配置。
63.磁性传感器桥接电路s包括第一磁阻传感器元件s1和第四磁阻传感器元件s4。第一和第四磁阻传感器元件s1和s4串联连接。此外,磁性传感器桥接电路s包括第二磁阻传感器元件s2和第三磁阻传感器元件s3。第二和第三磁阻传感器元件s2和s3串联连接。第一和第三磁阻传感器元件s1和s3被连接到磁性传感器桥接电路s的第一电源端子。第二和第四磁阻传感器元件s2和s4被连接到磁性传感器桥接电路s的不同的第二电源端子。
64.磁性传感器桥接电路d包括并联连接且进一步与第三磁阻传感器元件d3串联连接的第一磁阻传感器元件d1和第二磁阻传感器元件d2。此外,磁性传感器桥接电路d包括与彼此并联连接的第五磁阻传感器元件d5和第六磁阻传感器元件d6串联连接的第四磁阻传感器元件d4。还提供与第一和第二电源端子的连接。
65.由传感器布置s和d生成的差分传感器信号被相应的前置放大器asp 21和adir 22放大。放大的差分传感器信号之间具有差分值,分别由vdiff,speed和vdiff,dir表示。前置放大器adir 22的增益设置是可调节的,使得vdiff,dir的极值等于或基本等于vdiff,speed的极值,尽管彼此偏移90
°
。
66.图3c示出了线性地布置在传感器芯片上(例如,在x轴上)的传感器元件s1-s4和d1-d6的示例布置,其中,传感器元件被置于三个不同区域:左侧区域、中心区域和右侧区域。传感器布置的几何中心位于中心传感器元件d3和d4的第一几何中心。有效传感器元件间距通过左侧传感器元件的第二几何中心和右侧传感器元件的第三几何中心之间的距离来限定。第二和第三几何中心与第一几何中心的距离相等。
67.下面提供的等式1是用于根据极轮间距(pitch
pw
)与有效传感器元件间距(pitch
se
)的1:2比率的匹配(即,有效传感器元件间距与极轮半间距匹配)计算速度信号的阻尼系数的公式。下面提供的等式2是用于根据极轮间距(pitch
pw
)与有效传感器元件间距
(pitch
se
)的1:2比率的匹配(即,有效传感器元件间距与极轮半间距匹配)计算方向信号的阻尼系数的公式。下面提供的等式3是用于通过将等式2除以等式1来计算间距失配依赖比率的公式。
[0068][0069][0070][0071]
如上所述,信号处理器可实施查找表方法,用于检测极轮间距并根据检测到的极轮间距调整前置放大器adir 22的增益。可以知道两个或更多的极轮间距,并将其编写到查找表中。在以下示例中,轮间距4.4mm和5.7mm与数字测量信号dsp和ddir的总振幅值(参见查找表1)或数字测量信号dsp和ddir的最低有效位(lsb)的值(参见查找表2)相关。
[0072]
行#dsp[μt]ddir_4.4mm[μt]ddir_5.7mm[μt]118056412232725332999268
…………
[0073]
查找表1
[0074]
根据查找表1,信号处理器27被配置为区分两个预定的轮间距,并检测速度传感器100之前存在哪个轮间距。为了进行确定,信号处理器27被配置为基于数字速度信号dsp的测量振幅值选择表的一行。一旦选择了一行,信号处理器27评估数字方向信号ddir的测量振幅值,以选择在第二列和第三列中识别的相应轮间距。例如,如果数字速度信号dsp的振幅值为102,则选择第二行。在选择第二行后,数字方向信号ddir的振幅值95指示轮间距为4.4mm,并且数字方向信号ddir的振幅值70表示轮间距为5.7mm。基于轮间距的确定,增益控制器28被配置为针对轮间距预定的方向信号设置前置放大器adir22的增益设置。即,每个编程的轮间距具有由增益控制器28实施的对应增益设置。
[0075][0076][0077]
查找表2
[0078]
如查找表2所示,可通过使用预定位数的数字速度信号dsp和数字方向信号ddir的
最低有效位(lsb)来实施类似过程。这里,“lsb”表示将速度和方向信号进行数字化的adc的位数。adc输出的范围为[0;2
n-1
],其中,n是adc的位数。因此,在上表中提供了将要与adc 25和26输出的数字值进行比较的数字值。
[0079]
为了建立正确查找表的规则包括不使ddir_4.4mm的范围(轮间距4.4mm情况下的差分速度场范围)与ddir_5.7mm(轮间距5.7mm情况下的差分速度场范围)重叠。由于如果参考轮的轮间距较小则振幅值将较大,列ddir_4.4mm中的值将大于同一行内的列ddir_5.7mm中的对应值。
[0080]
信号处理器27还可以应用用于改变向方向前置放大器adir 22应用的增益的伪代码。伪代码的一个示例如下所示:
[0081][0082]
因此,一系列if then else语句可由逻辑电路来形式化或实施,该逻辑电路用于区别轮间距并基于满足if then else语句之一的第一测量值和第二测量值的组合来选择对应增益设置。if then else语句可在代码中用于确认为方向前置放大器adir 22应用不同增益设置(dir_gain_pre-amp)的特定条件。信号处理器27被配置为基于if then else语句选择对应增益设置,其中,信号处理器基于满足if then else语句之一的数字速度信号dsp(例如,其振幅值)和数字方向信号ddir(例如,其振幅值)的组合来选择对应增益设置。针对与额外轮间距相对应的额外增益设置,可以添加额外的代码行(例如,逻辑电路中的额外逻辑),其中基于速度和方向信号振幅的额外条件被添加以区别正确的轮间距。
[0083]
此外,cordic运算能够计算两个值之间的除法。因此,信号处理器27可被配置为将速度信号振幅除以方向信号振幅以确定比率。在轮间距为4.4mm的情况下,比率接近1,因为方向路径被设计以在数字域中具有几乎一比一的lsb14信号振幅。如果速度和方向振幅之间的除法导致比率等于或大于预定比率(例如,等于或大于1.3),则信号处理器27被配置为将方向前置放大增益设置从24增加到32,其中,在该示例中,32是针对5.7mm轮间距的优化放大,而24是针对4.4mm轮间距的优化放大。另一方面,如果比率小于预定比率(例如,小于1.3),则信号处理器27被配置为将方向前置放大设置、保持或减小到24的增益设置。应理解,比率常数或比率范围的数字随着可能的前置放大选项的数字以及可用极轮间距的数字而增加。即,随着比率范围的数字的增加,其比率范围可随着更多轮间距被编程而变窄。因此,可根据将由信号处理器27区别的轮间距的数目来限定多个比率范围。
[0084]
鉴于上述情况,存在多种方式使信号处理器27可将数字速度信号dsp(例如,其振幅值)和数字方向信号ddir(例如,其振幅值)的组合与多个增益设置中的对应增益设置相关联,基于数字的速度和方向值的组合从多个增益设置中选择对应增益设置,并将所选择的对应增益设置设置为方向前置放大器adir 22的增益设置。
[0085]
极轮间距可经由查找、编码和/或算术来显性或隐性地确定,其中,基于轮间距的显性或隐性确定来选择方向放大器增益。如果显性确定,则每个极轮间距可被明确映射到对应的方向放大器增益。在没有显性确定极轮间距的情况下,也可以存在隐性映射。存储在传感器电路20的存储器中的多个增益设置中的每一个对应于在传感器电路20的存储器中编程的多个极轮间距中的一个。因此,多个增益设置可供信号处理器27(例如,增益控制器28)基于选择算法来选择。
[0086]
虽然已经公开了各种实施例,但本领域技术人员应理解,可以进行各种更改和修改,这将在不脱离本发明的精神和范围的情况下实现本文所公开概念的一些优点。对于本领域的技术人员来说显而易见的是,可以适当地替换执行相同功能的其他部件。应当理解,在不脱离本发明的范围的情况下,可以利用其他实施例并且可以进行结构或逻辑改变。应当提及的是,即使没有明确提及,但参考特定附图解释的特征可与其他附图的特征组合。所附权利要求书及其法律等效物旨在涵盖对一般发明概念的此类修改。
[0087]
此外,以下权利要求在此并入详细描述,其中每条权利要求可作为单独的示例实施例独立存在。虽然每条权利要求可作为单独的示例实施例独立存在,但注意,尽管从属权利要求可在权利要求中提及与一个或多个其他权利要求的特定组合,但其他示例实施例也可以包括该从属权利要求与每个其他从属或独立权利要求的主题的组合。除非说明不打算进行特定组合,否则本文建议此类组合。此外,意图还包括任何其他独立权利要求的特征,即使该权利要求不直接从属于该独立权利要求。
[0088]
还应注意,说明书或权利要求中公开的方法可通过具有用于执行这些方法的相应动作的装置来实施。例如,本公开描述的技术可以至少部分地在硬件、软件、固件或其任何组合中实施。例如,所述技术的各个方面可以在一个或多个处理器内实施,包括一个或多个微处理器、dsp、asic或任何其他等效的集成或离散逻辑电路以及此类部件的任何组合。
[0089]
此外,应当理解,说明书或权利要求书中公开的多个动作或功能的公开不应解释为特定顺序。因此,多个动作或功能的公开将不会限于特定顺序,除非这些动作或功能因技术原因不可互换。此外,在一些实施例中,单个动作可包括多个子动作或者可分解成多个子动作。除非明确排除,否则这种子动作可包括或作为该单个动作的公开的一部分。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。