1.本发明涉及设备控制领域,尤其涉及多参量模糊决策的堆垛机传动控制系统。
背景技术:
2.堆垛起重机是一种仓储设备,是指采用货叉或串杆作为取物装置,在仓库、车间等处攫取、搬运和堆垛或从高层货架上取放单元货物的专用起重机。现有技术的方法不能解决堆垛机高度过高,容易出现高处摇摆的问题。如何保证高速和快速制动的情况下如何避免垛机摇摆倒塌是当前需要解决的问题。
3.申请号cn201810444922.x公开一种堆垛机及基于该堆垛机的堆垛机自适应调整方法,包括堆垛机控制系统以及堆垛机本体;堆垛机本体包括载物台以及货叉,货叉可相对于载物台伸缩;堆垛机本体还包括两个传感器;两个传感器设置在载物台的与货叉伸出方向同侧的一端上,且沿堆垛机本体运动的方向在载物台的前后各分布一个;两个传感器分别与堆垛机控制系统连接;堆垛机控制系统根据两个传感器检测的信息,判断货架是否有变形及变形程度,并控制堆垛机本体自动自适应调整。
4.申请号cn202011579855.6公开了机器人自动堆垛智能仓库,包括若干排货架、堆垛机、输送线、托盘和总控机,所述堆垛机包含安装座、导轨、顶梁和载货台,所述载货台可沿导轨进行升降,所述载货台上安装一组伸缩货叉,所述安装座底部设有一组车轮,内部设有控制器和驱动系统,所述控制器与总控机信息互通,所述托盘用于承载货物。
5.现有技术中堆垛机的控制都基于堆垛机自身设置的各个传感器,但是堆垛机自身传感器一般难以对货物进行准确的分类和判断,还需要人工进行干预,如何实现针对不同货物自动控制也是本领域需要解决的问题之一。
技术实现要素:
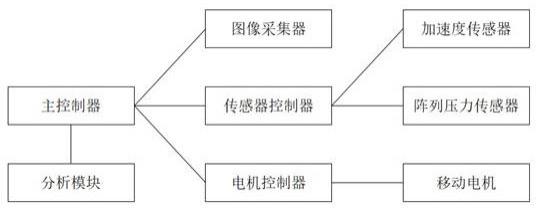
6.针对上述内容,为解决上述问题,提供一种基于多参量模糊决策的堆垛机传动控制系统,包括主控制器、图像采集器、传感器控制器和电机控制器;图像采集器、传感器控制器和电机控制器连接主控制器;图像采集器设置在堆垛机的工作场所,用于对堆垛机整体进行图像采集,并进行图像分析,将分析结果发送给主控制器;传感器控制器设置在堆垛机上,传感器控制器连接加速度传感器和阵列压力传感器,加速度传感器用于对堆垛机的加速度进行检测,阵列压力传感器用于对堆垛机货叉上的货物对堆垛机的压力进行检测;传感器控制器将加速度传感器和阵列压力传感器的检测数据发送给主控制器;电机控制器设置在堆垛机上,电机控制器连接电机,电机驱动堆垛机移动;主控制器设置有分析模块,分析模块对图像采集器和传感器控制器上传的数据进行分析,并计算出电机控制参数输出至主控制器;主控制器将电机控制参数发送至电机控制器以实现对电机的控制。
7.图像采集器采集堆垛机的整机图像进行连续拍摄,并利用图像识别算法对图像中的堆垛机整机轮廓、货叉轮廓和货物轮廓进行识别;图像采集器根据堆垛机整机轮廓坐标数据和货叉轮廓坐标数据计算出货叉位置高度,并将货叉位置高度和货物轮廓坐标数据发送给主控制器。
8.加速度传感器采集堆垛机实时的加速度,并将加速度方向和大小发送给传感器控制器;阵列压力传感器包括多个压力传感头,压力传感头设置在货叉上排成阵列;阵列压力传感器将货叉上每个压力传感头受到的压力组成压力矩阵发送给传感器控制器;传感器控制器将堆垛机加速度方向、大小以及压力矩阵发送给主控制器。
9.分析模块从主控制获取货叉位置高度、货物轮廓坐标数据、堆垛机加速度方向、大小以及压力矩阵;分析模块根据货物轮廓数据和压力矩阵进行svm分类模型分析,得到货物的种类;分析模块根据压力矩阵计算货物的总压力;分析模块将货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a输入多参量模糊决策模型,并输出电机控制参数至主控制器。
10.图像采集器内存储有环境背景图像,对堆垛机进行连续拍摄,并将拍摄的图像与环境背景图像进行比对,从而从图像中识别出堆垛机所处的位置以及堆垛机所处位置的整体轮廓;堆垛机的机身和货叉涂装有不同的颜色,图像采集器对整体轮廓进行分割,从整体轮廓中提取出堆垛机机身颜色的坐标范围和货叉颜色坐标范围,从而可以提取出堆垛机整机轮廓和货叉轮廓;剩余位置进行连通域计算,范围最大的连通域则为货物轮廓。
11.svm分类模型的构建方法为:预先将多种货物分别放置到堆垛机上,之后进行货物的图像采集以及堆垛机货叉上压力矩阵的采集;采样数据大于500个,并将500个采样数据其中随机选择400个作为训练集进行svm分类模型训练,将剩余100个作为验证集进行验证;构建svm分类模型。
12.多参量模糊决策模型的构建方式为:将不同种类、不同重量的货物放置到堆垛机上,其中n种货物选择n种不同重量,则共n2种组合;将堆垛机在不同货叉高度、不同堆垛机加速度方向p、堆垛机加速度大小a、不同电机驱动参数下进行运输;运输中实时采集货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a;不断调高电机的驱动速度,直到货物从堆垛机上倒塌为止;将货物没有倒塌时采集的最高电机驱动速度v作为输出参数,对应的货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a作为输入参数建立多参量模糊决策模型。
13.此外,本发明提供一种利用所述系统进行的多参量模糊决策的堆垛机传动控制方法,包括如下步骤:步骤a、采集样本,划分训练集和验证集,构建svm分类模型;步骤b、采集样本,构建多参量模糊决策模型;步骤c、图像采集器采集堆垛机的整机图像进行连续拍摄,并利用图像识别算法对
图像中的堆垛机整机轮廓、货叉轮廓和货物轮廓进行识别;图像采集器根据堆垛机整机轮廓坐标数据和货叉轮廓坐标数据计算出货叉位置高度,并将货叉位置高度和货物轮廓坐标数据发送给主控制器;步骤d、加速度传感器采集堆垛机实时的加速度,并将加速度方向和大小发送给传感器控制器;阵列压力传感器包括多个压力传感头,压力传感头设置在货叉上排成阵列;阵列压力传感器将货叉上每个压力传感头受到的压力组成压力矩阵发送给传感器控制器;传感器控制器将堆垛机加速度方向、大小以及压力矩阵发送给主控制器;步骤e、分析模块从主控制获取货叉位置高度、货物轮廓坐标数据、堆垛机加速度方向、大小以及压力矩阵;分析模块根据货物轮廓数据和压力矩阵进行svm分类模型分析,得到货物的种类;分析模块根据压力矩阵计算货物的总压力;分析模块将货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a输入多参量模糊决策模型,并输出电机控制参数至主控制器;主控制器将电机控制参数发送至电机控制器以实现对电机的控制。
14.本发明的有益效果为:本发明基于图像识别技术,使用图像采集器采集堆垛机的整体外观,一方面实现了货物的整体轮廓识别,另一方面可以对堆垛机的货叉高度进行定位;节省了大量传感器,可以直接获得准确的运行参数;同时利用压力传感器矩阵,结合货物的轮廓实现对货物的种类和重量的同时识别;识别准确,无需单独计算货物的重心。
15.基于背景扣除方法和颜色提取方法对图像采集器采集的图像进行快速识别,可以节约大量计算资源,降低系统运行的硬件要求,提高系统运转速度。
16.基于多参数模糊决策方法,利用货物种类、重量、货叉高度、堆垛机当前加速度参数作为输入,以堆垛机的最高运行速度作为输出构建多参量模糊决策模型;利用模糊决策模型可以无需关注设备各个参数之间的运行关系,直接得到电机的控制参数。利用模糊决策方法得到的运行参数直接进行控制,控制效果好。
附图说明
17.被包括来提供对所公开主题的进一步认识的附图,将被并入此说明书并构成该说明书的一部分。附图也阐明了所公开主题的实现,以及连同详细描述一起用于解释所公开主题的实现原则。没有尝试对所公开主题的基本理解及其多种实践方式展示超过需要的结构细节。
18.图1为本发明整体架构示意图。
具体实施方式
19.本发明的优点、特征以及达成所述目的的方法通过附图及后续的详细说明将会明确。
20.实施例1:一种基于多参量模糊决策的堆垛机传动控制系统,包括主控制器、图像采集器、传
感器控制器和电机控制器;图像采集器、传感器控制器和电机控制器连接主控制器;图像采集器设置在堆垛机的工作场所,用于对堆垛机整体进行图像采集,并进行图像分析,将分析结果发送给主控制器;传感器控制器设置在堆垛机上,传感器控制器连接加速度传感器和阵列压力传感器,加速度传感器用于对堆垛机的加速度进行检测,阵列压力传感器用于对堆垛机货叉上的货物对堆垛机的压力进行检测;传感器控制器将加速度传感器和阵列压力传感器的检测数据发送给主控制器;电机控制器设置在堆垛机上,电机控制器连接电机,电机驱动堆垛机移动;主控制器设置有分析模块,分析模块对图像采集器和传感器控制器上传的数据进行分析,并计算出电机控制参数输出至主控制器;主控制器将电机控制参数发送至电机控制器以实现对电机的控制。
21.图像采集器采集堆垛机的整机图像进行连续拍摄,并利用图像识别算法对图像中的堆垛机整机轮廓、货叉轮廓和货物轮廓进行识别;图像采集器根据堆垛机整机轮廓坐标数据和货叉轮廓坐标数据计算出货叉位置高度,并将货叉位置高度和货物轮廓坐标数据发送给主控制器。
22.加速度传感器采集堆垛机实时的加速度,并将加速度方向和大小发送给传感器控制器;阵列压力传感器包括多个压力传感头,压力传感头设置在货叉上排成阵列;阵列压力传感器将货叉上每个压力传感头受到的压力组成压力矩阵发送给传感器控制器;传感器控制器将堆垛机加速度方向、大小以及压力矩阵发送给主控制器。
23.分析模块从主控制获取货叉位置高度、货物轮廓坐标数据、堆垛机加速度方向、大小以及压力矩阵;分析模块根据货物轮廓数据和压力矩阵进行svm分类模型分析,得到货物的种类;分析模块根据压力矩阵计算货物的总压力;分析模块将货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a输入多参量模糊决策模型,并输出电机控制参数至主控制器。
24.图像采集器内存储有环境背景图像,对堆垛机进行连续拍摄,并将拍摄的图像与环境背景图像进行比对,从而从图像中识别出堆垛机所处的位置以及堆垛机所处位置的整体轮廓;堆垛机的机身和货叉涂装有不同的颜色,图像采集器对整体轮廓进行分割,从整体轮廓中提取出堆垛机机身颜色的坐标范围和货叉颜色坐标范围,从而可以提取出堆垛机整机轮廓和货叉轮廓;剩余位置进行连通域计算,范围最大的连通域则为货物轮廓。
25.svm分类模型的构建方法为:预先将多种货物分别放置到堆垛机上,之后进行货物的图像采集以及堆垛机货叉上压力矩阵的采集;采样数据大于500个,并将500个采样数据其中随机选择400个作为训练集进行svm分类模型训练,将剩余100个作为验证集进行验证;构建svm分类模型。
26.多参量模糊决策模型的构建方式为:将不同种类、不同重量的货物放置到堆垛机上,其中n种货物选择n种不同重量,则共n2种组合;
将堆垛机在不同货叉高度、不同堆垛机加速度方向p、堆垛机加速度大小a、不同电机驱动参数下进行运输;运输中实时采集货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a;不断调高电机的驱动速度,直到货物从堆垛机上倒塌为止;将货物没有倒塌时采集的最高电机驱动速度v作为输出参数,对应的货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a作为输入参数建立多参量模糊决策模型。
27.实施例2:提供一种利用所述系统进行的多参量模糊决策的堆垛机传动控制方法,包括如下步骤:步骤a、采集样本,划分训练集和验证集,构建svm分类模型;步骤b、采集样本,构建多参量模糊决策模型;步骤c、图像采集器采集堆垛机的整机图像进行连续拍摄,并利用图像识别算法对图像中的堆垛机整机轮廓、货叉轮廓和货物轮廓进行识别;图像采集器根据堆垛机整机轮廓坐标数据和货叉轮廓坐标数据计算出货叉位置高度,并将货叉位置高度和货物轮廓坐标数据发送给主控制器;步骤d、加速度传感器采集堆垛机实时的加速度,并将加速度方向和大小发送给传感器控制器;阵列压力传感器包括多个压力传感头,压力传感头设置在货叉上排成阵列;阵列压力传感器将货叉上每个压力传感头受到的压力组成压力矩阵发送给传感器控制器;传感器控制器将堆垛机加速度方向、大小以及压力矩阵发送给主控制器;步骤e、分析模块从主控制获取货叉位置高度、货物轮廓坐标数据、堆垛机加速度方向、大小以及压力矩阵;分析模块根据货物轮廓数据和压力矩阵进行svm分类模型分析,得到货物的种类;分析模块根据压力矩阵计算货物的总压力;分析模块将货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a输入多参量模糊决策模型,并输出电机控制参数至主控制器;主控制器将电机控制参数发送至电机控制器以实现对电机的控制。
28.实际在进行步骤b时可以让控制经验丰富的人工驾驶堆垛机前后运行,同时监测电机控制参数和其他各项参数,这样可以节约大量的运行时间;或者以人工驾驶的电机运行参数作为初始值,逐步增大电机运行速度,直到货物倒塌为止,也可以节省模型训练参数采集的时间。
29.多参量模糊决策模型的具体选择可以根据系统的实际性能进行选择,可以选择基础的多参量模糊决策模型,也可以当系统运行性能较强时,选择现有技术中增加节点的模糊训练模型,或者当系统性能较低时选择马氏距离算法,直接采集大量的样本,然后在实际运行时,采集各个参量组成的向量与样本中参量组成向量的马氏距离;选择距离最短的样本参量对应的电机控制参数直接控制电机。该处的参量组成的向量为[c,m,h,p,a],对应货物种类c、货物的总压力m、货叉位置高度h、堆垛机加速度方向p、堆垛机加速度大小a。
[0030]
以上所述,仅为本发明的优选实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵
盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。