技术特征:
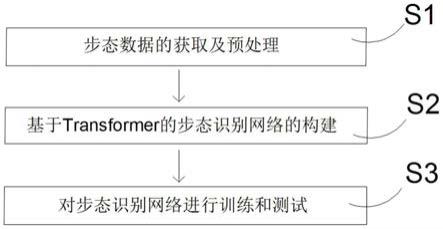
1.一种基于深度自注意力变换网络的步态识别方法,其特征在于,所述方法包括如下步骤:s1,步态数据的获取及预处理;s2,基于transformer的步态识别网络的构建;s3,对所述步态识别网络进行训练和测试。2.根据权利要求1所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述步态数据输入所述基于transformer的步态识别网络时的输入维度为n*s*c*h*w,其中n表示批的大小,s表示输入步态序列的帧数,c表示步态剪影图像的通道数,h表示步态剪影图像的高度,w表示步态剪影图像的宽度。3.根据权利要求2所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述步骤s2构建的基于transformer的步态识别网络包括空间特征提取模块、时间特征提取模块、分类器融合模块。4.根据权利要求3所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述空间特征提取模块包括局部空间特征提取部分和整体空间特征提取部分。5.根据权利要求4所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述局部空间特征提取部分包括输入层和六个卷积层级联组成的特征提取网络。6.根据权利要求5所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述六个卷积层中的两个卷积层包括最大池化操作。7.根据权利要求6所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述整体空间特征提取部分包括全局最大池化操作和四个卷积层级联组成的特征提取网络。8.根据权利要求7所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述四个卷积层中的一个卷积层包括最大池化操作。9.根据权利要求8所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述时间特征提使模块使用改进的transformer网络提取步态序列的时间特征。10.根据权利要求9所述的基于深度自注意力变换网络的步态识别方法,其特征在于,所述基于transformer的步态识别网络的损失函数为三元损失函数。
技术总结
本发明属于计算机视觉及视频分析技术领域,具体而言,涉及一种基于深度自注意力变换网络的步态识别方法,该方法包括如下步骤:S1,步态数据的获取及预处理;S2,基于Transformer的步态识别网络的构建;S3,对步态识别网络进行训练和测试。该基于Transformer的步态识别网络包括空间特征提取模块、时间特征提取模块、分类器融合模块。本发明使用Transformer网络对步态序列的时间特征进行显性建模,充分提取步态序列的时间特征;通过训练多个弱分类器的方式解决了Transformer网络易过拟合的问题;本发明方法的步态识别准确率较高好。本发明通过对Transformer网络中Encoder模块的优化,减少了模型的参数量和计算量,使得本发明方法的步态识别速度和准确率较高。方法的步态识别速度和准确率较高。方法的步态识别速度和准确率较高。
技术研发人员:牛毅 赵鑫 马明明 李甫 石光明
受保护的技术使用者:西安电子科技大学
技术研发日:2022.01.17
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。