技术特征:
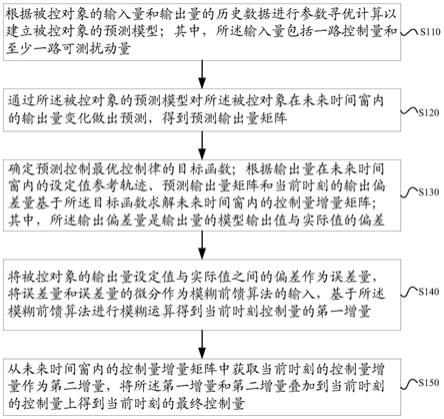
1.一种火电机组控制系统的控制方法,包括:根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型;其中,所述输入量包括一路控制量和至少一路可测扰动量;通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵;确定预测控制最优控制律的目标函数;根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵;其中,所述输出偏差量是输出量的模型输出值与实际值的偏差;将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量;从未来时间窗内的控制量增量矩阵中获取当前时刻的控制量增量作为第二增量,将所述第一增量和第二增量叠加到当前时刻的控制量上得到当前时刻的最终控制量。2.如权利要求1所述的方法,其特征在于:所述被控对象的输入量包括一路控制量和三路可测扰动量。3.如权利要求2所述的方法,其特征在于:根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型,包括:根据被控对象的输入量和输出量的历史数据进行参数寻优计算得到被控对象的受控自回归积分滑动平均过程carima模型,所述被控对象的carima模型通过公式(1)确定:其中,k代表当前时刻;y(k)代表当前时刻的输出量;u(k-1)代表上一时刻的控制量;v1(k-1)代表上一时刻的第一可测扰动量;v2(k-1)代表上一时刻的第二可测扰动量;v3(k-1)代表上一时刻的第三可测扰动量;e(k)为均值为零的白噪声;δ=1-z-1
为差分算子;a(z-1
),b(z-1
),b1(z-1
),b2(z-1
),b3(z-1
),c(z-1
)均为z-1
的多项式;的多项式;的多项式;的多项式;的多项式;的多项式;
4.如权利要求2所述的方法,其特征在于:当所述被控对象为过热汽温控制系统时,所述一路控制量为过热器减温水流量,三路可测扰动量分别为:主蒸汽流量、给煤量和减温器前蒸汽温度;输出量为过热器出口汽温。5.如权利要求3所述的方法,其特征在于,根据被控对象的输入量和输出量的历史数据进行参数寻优计算以建立被控对象的预测模型,还包括:对所述carima模型加阶跃信号得到所述carima模型的阶跃响应;利用基于热工对象传递函数g(s)的多变量线性离散状态空间模型,采用粒子种群优化pso算法对所述carima模型的阶跃响应进行识别以得到被控对象的简化的传递函数模型;其中,k、α表示增益信息,m、n表示阶次信息,β表示微分时间常数,τ表示纯滞后时间常数,t表示惯性时间常数。6.如权利要求3所述的方法,其特征在于:通过所述被控对象的预测模型对所述被控对象在未来时间窗内的输出量变化做出预测,得到预测输出量矩阵,包括:确定未来时间窗对应的预测步数为n步,则预测输出量矩阵y通过公式(2)确定:其中,其中,是第j步预测的预测输出量,j=1,2,3...n;k代表当前时刻;代表当前时刻的模型输出量;代表当前时刻的模型输出量;代表当前时刻的模型输出量;代表当前时刻的模型输出量;
δu(k)=[δu(k),δu(k 1),...,δu(k n-1)]
t
;δu(k-1)=[δu(k-n
b
),δu(k-n
b
1),...,δu(k-1)]
t
;g1(z-1
)=[g
11
(z-1
),g
12
(z-1
),...,g
1n
(z-1
)]
t
;g2(z-1
)=[g
21
(z-1
),g
22
(z-1
),...,g
2n
(z-1
)]
t
;g3(z-1
)=[g
31
(z-1
),g
32
(z-1
),...,g
3n
(z-1
)]
t
;f(z-1
)=[f1(z-1
),f2(z-1
),...,f
n
(z-1
)]
t
。7.如权利要求6所述的方法,其特征在于:确定预测控制最优控制律的目标函数,包括:确定未来时间窗对应的预测步数为n步,控制量的控制步数为m步,预测控制最优控制律的目标函数j通过公式(3)确定:将目标函数j表示为公式(4):j=[y(k 1)-y
r
(k 1)]
t
[y(k 1)-y
r
(k 1)] λδu(k)
t
δu(k)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)y
r
(k 1)=[y
r
(k 1),y
r
(k 2),...,y
r
(k n)]
t
;δu(k)=[δu(k),δu(k 1),...,δu(k m-1)]
t
;λ=[λ1,λ2,...,λ
m
]
t
;其中,q
j
是第j步预测的误差对应的加权系数,λ
i
是第i-1步控制的控制量增量对应的加权系数;δu(k i-1)是第i-1步控制的控制量增量;y
r
(k j)是第j步预测对应的输出量设定值;y(k 1)是未来时间窗内的预测输出量矩阵,y
r
(k 1)是输出量在未来时间窗内的设定值参考轨迹,δu(k)是未来时间窗内的控制量增量矩阵。8.如权利要求7所述的方法,其特征在于:根据输出量在未来时间窗内的设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量基于所述目标函数求解未来时间窗内的控制量增量矩阵,包括:设定控制量的控制步数m小于未来时间窗对应的预测步数n,对g矩阵进行化简,化简后的g矩阵为:
将目标函数j对δu(k)求导,并令求导结果为零,得到未来时间窗内的控制量增量矩阵δu(k),δu(k)通过公式(5)确定:其中,e(k)=[err(k),err(k),...,err(k)]
t
;err(k)是当前时刻的输出偏差量,e(k)是未来时间窗内的输出偏差量矩阵。9.如权利要求1所述的方法,其特征在于:将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,基于所述模糊前馈算法进行模糊运算得到当前时刻控制量的第一增量,包括:将被控对象的输出量设定值与实际值之间的偏差作为误差量e,e=y
r-y;其中,y
r
是输出量的设定值,y是输出量的实际值;将误差量e和误差量e的微分作为模糊前馈算法的输入,模糊前馈算法的输出量为f;确定模糊前馈算法的两路输入和一路输出的确切量论域范围,将确切量转化为等级量的区间向量并进行等级量的划分;确定模糊前馈算法的两路输入和一路输出的模糊量论域范围和模糊子集;根据模糊规则进行计算,通过加权平均判决规则进行输出非模糊化处理,得到一个确切量的输出f;将f作为当前时刻控制量的第一增量。10.如权利要求7所述的方法,其特征在于:第j步预测对应的输出量设定值通过以下方式确定:通过公式(7)设定第j步预测对应的输出量y
r
(k j)y
r
(k j)=αy
r
(k j-1) (1-α)y
sp
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)其中,α为柔化因子,0<α<1;y
sp
为输出量的目标值。11.如权利要求1所述的方法,其特征在于:将被控对象的输出量设定值与实际值之间的偏差作为误差量,还包括:如果被控对象满足热工模型传递函数g(s),则对被控对象的输出量设定值y
r
(s)进行如下公式(8)的处理:y
r
(s)=g(s).y
sp
(s)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)其中,k、α表示增益信息,m、n表示阶次信息,β表示微分时间常数,τ表示纯滞后时间常数,t表示惯性时间常数,y
sp
(s)是输出量的目标值的拉氏变换。12.一种火电机组控制系统的控制装置,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的火电机组控制系统的控制程序,所述火电机组控制系统的控制程序被所述处理器执行时实现上述权利要求1-11中任一项所述的火电机组控制系统的控制方法的步骤。
13.一种计算机可读存储介质,所述计算机可读存储介质上存储有火电机组控制系统的控制程序,所述火电机组控制系统的控制程序被处理器执行时实现上述权利要求1-11中任一项所述的火电机组控制系统的控制方法的步骤。
技术总结
本文公开了一种火电机组控制系统的控制方法及装置,包括:根据被控对象的输入量和输出量的历史数据建立预测模型;输入量包括一路控制量和至少一路可测扰动量;通过预测模型对未来时间窗内的输出量变化做出预测得到预测输出量矩阵;确定最优控制律的目标函数;根据输出量设定值参考轨迹、预测输出量矩阵和当前时刻的输出偏差量求解控制量增量矩阵;将被控对象的输出量设定值与实际值之间的偏差作为误差量,将误差量和误差量的微分作为模糊前馈算法的输入,进行模糊运算得到当前时刻控制量的第一增量,将当前时刻的控制量增量和第一增量叠加到当前时刻的控制量上得到当前时刻的最终控制量。本文能提高控制系统的抗干扰能力。力。力。
技术研发人员:田彬 刘柱 周传杰 孙灵革 张林 臧彦廷 刘玉晶 宫喜鹏
受保护的技术使用者:国电汉川发电有限公司 国电南宁发电有限责任公司 国电哈尔滨热电有限公司
技术研发日:2020.10.29
技术公布日:2022/5/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。