1.本发明属于智能制造技术领域,尤其涉及一种智能制造用一体化智能控制器。
背景技术:
2.随着工业自动化的快速发展,尤其在智能制造等领域,控制器的应用十分广泛,自动化控制结构的多变性和多应用性对运动控制器的提出了更高的要求;
3.现有的智能控制器在使用时,一般是通过多根螺丝安装的机器表面的,控制器并未得到有效保护,同时拧螺丝的方式使得拆装不方便。
技术实现要素:
4.本发明提供一种智能制造用一体化智能控制器,旨在解决上述的问题。
5.本发明是这样实现的,一种智能制造用一体化智能控制器,包括:
6.控制器本体;
7.安装单元,用于安装控制器本体,所述安装单元包括:
8.安装壳,用于保护控制器本体;
9.设于安装壳内的支撑板,用于承载控制器本体;
10.装夹组件,用于对控制器本体进行装夹;
11.联动组件,用于控制器本体向安装壳内移动的同时通过联动组件带动装夹组件对控制器本体进行装夹。
12.优选地,所述控制器本体包括外壳、触摸屏、接口区和电路板。
13.优选地,所述装夹组件包括:
14.顶部装夹件,用于对控制器本体顶部进行定位;
15.侧边装夹件,用于对控制器本体侧边进行定位;
16.所述联动组件分别与顶部装夹件和侧边装夹件联动。
17.优选地,所述顶部装夹件包括:
18.定位杆;
19.第一驱动机构,用于带动定位杆靠近或远离控制器本体顶部。
20.优选地,所述侧边装夹件包括:
21.侧夹板;
22.第二驱动机构,用于带动侧夹板靠近或远离控制器本体侧壁。
23.优选地,所述第一驱动机构包括:
24.转动安装于安装壳内的两个对称的直齿轮;
25.设于所述直齿轮上的活动座,所述活动座滑动连接于直齿轮端面上开设的弧形滑槽内,定位杆固定于活动座上;
26.设于弧形滑槽内的第二弹簧,第二弹簧一端活动座连接,另一端与弧形滑槽端部连接。
27.优选地,所述第二驱动机构包括:
28.转动安装于安装壳两侧壁上的至少一根螺纹杆,所述螺纹杆位于安装壳内的一端螺纹连接有内螺纹套;
29.固定连接于内螺纹套与侧夹板之间的第三弹簧;
30.连接于侧夹板与安装壳侧壁之间的水平的导向伸缩杆,用于对侧夹板进行水平移动导向。
31.优选地,所述联动组件包括:
32.水平滑动安装于安装壳内的两根齿条,两根齿条分别与两个直齿轮啮合;
33.所述安装壳两侧壁上分别转动安装的外螺旋杆,外螺旋杆一端插入临近的齿条内并与此齿条螺旋配合;
34.套设于外螺旋杆上的第一弹簧,第一弹簧位于齿条与安装壳侧壁之间;
35.连接于外螺旋杆与螺纹杆之间的传动件,外螺旋杆转动时通过传动件带动螺纹杆转动;
36.设于安装壳内的背板,背板上对称铰接有两根第一连杆,两根第一连杆分别与两根齿条铰接,所述背板顶部开设有插孔,所述安装壳顶部竖直穿设有能够插入插孔的插销。
37.优选地,还包括有减震单元,所述减震单元包括:
38.连接于支撑板和安装壳底部之间的多根第四弹簧,多根第四弹簧间隔设置;
39.设于支撑板和安装壳底部之间多组减震件;
40.所述减震件包括:
41.固定于支撑板底部的块体;
42.环向间隔设于安装壳底部且位于块体四周的多根z型的弹性片,所述弹性片一端延伸至块体下方,另一端与安装壳底部接触,弹性片与安装壳底部转动连接。
43.优选地,还包括有散热单元,用于对控制器本体内部进行散热,所述散热单元包括:
44.固定安装于控制器本体侧壁上的防尘网;
45.固定安装控制器本体内腔且靠近任一防尘网的风机,用于加速空气流动带出控制器本体内的热量;
46.设于控制器本体内腔顶部和底部的多块间隔的导流弧形板,所述导流弧形板一端与控制器本体铰接;
47.连接于同一排的多块导流弧形板之间的连接杆;
48.设于控制器本体内腔的动力机构,用于带动导流弧形板摆动,动力机构驱动连接杆。
49.与现有技术相比,本技术实施例主要有以下有益效果:
50.本发明所提供的智能制造用一体化智能控制器通过设置安装单元,所述安装单元包括安装壳、支撑板、装夹组件和联动组件,将控制器本体放入安装壳内,通过联动组件带动装夹组件对控制器本体进行自动装夹,方便快速,提高了工作效率;
51.设有减震单元,所述减震单元包括第四弹簧和减震件,所述减震件包括块体和弹性片,通过第四弹簧能够进行缓冲减震,支撑板向下震动时,块体挤压弹性片,弹性片的弹力能够进行缓冲减震,同时弹性片发生转动,将支撑板向上顶,进一步提高了缓冲减震效
果;
52.设有散热单元,所述散热单元包括防尘网、风机、导流弧形板、连接杆和动力机构,通过动力机构带动导流弧形板摆动时,将壳体内腔侧边的空气改变角度导向壳体内的电子元件,有利于扩大散热范围同时能够充分对电子元件进行散热。
附图说明
53.图1是本发明提供的一种智能制造用一体化智能控制器实施例1中控制器本体的结构示意图;
54.图2是本发明提供的一种智能制造用一体化智能控制器实施例1中控制器本体的硬件架构图;
55.图3是本发明提供的一种智能制造用一体化智能控制器实施例1中安装单元的结构示意图;
56.图4是图3中的局部放大图;
57.图5是本发明提供的一种智能制造用一体化智能控制器实施例1中安装单元的俯视结构图;
58.图6是本发明提供的一种智能制造用一体化智能控制器实施例1中传动件的结构示意图;
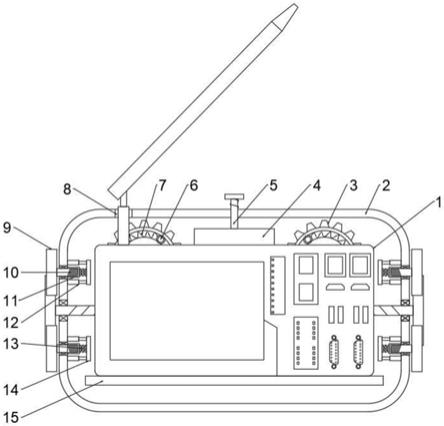
59.图7是本发明提供的一种智能制造用一体化智能控制器实施例1的结构示意图;
60.图8是本发明提供的一种智能制造用一体化智能控制器实施例2的结构示意图;
61.图9是本发明提供的一种智能制造用一体化智能控制器实施例3中散热单元的结构示意图。
62.附图标记注释:1、控制器本体;111、天线;112、触摸屏;113、接口区;2、直齿轮;3、安装壳;4、背板;5、插销;6、定位杆;7、第二弹簧;8、开口槽;9、传动件;10、螺纹杆;11、内螺纹套;12、导向伸缩杆;13、第三弹簧;14、侧夹板;15、支撑板;16、齿条;17、外螺旋杆;18、第一弹簧;19、第一连杆;20、第四弹簧;21、弹性片;22、块体;23、风机;24、防尘网;25、导流弧形板;26、连接杆;27、盘体;28、扇板;29、第二连杆。
具体实施方式
63.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术;本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。本技术的说明书和权利要求书或上述附图中的术语“第一”、“第二”等是用于区别不同对象,而不是用于描述特定顺序。
64.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
65.实施例1
66.本发明实施例提供了一种智能制造用一体化智能控制器,如图1所示,包括:
67.控制器本体1;
68.安装单元,用于安装控制器本体1,所述安装单元包括:
69.安装壳3,用于保护控制器本体1,可以在安装壳3前侧壁上安装门体,门体通过铰链和搭扣安装在安装壳3上;
70.设于安装壳3内的支撑板15,用于承载控制器本体1,本实施例中,所述支撑板15与安装壳3固定连接;
71.装夹组件,用于对控制器本体1进行装夹;
72.联动组件,用于控制器本体1向安装壳3内移动的同时通过联动组件带动装夹组件对控制器本体1进行装夹;
73.将控制器本体1放入安装壳3内移动时,通过联动组件带动装夹组件对控制器本体1进行自动装夹,方便快速,提高了工作效率;
74.具体的,如图2所示,所述控制器本体1包括外壳、天线111、触摸屏112、接口区113和电路板,天线111、触摸屏112和接口区113均安装于外壳前侧壁上,电路板安装于外壳内,安装壳3上开设有供天线111活动的开口槽8,本实施例中,优选所述触摸屏112为4.3英寸,所述电路板包括包括母板、计算板和外设拓展板,所述计算板包括计算板a和计算板b,计算板a、计算板b和外设拓展板分别与母板电连接,外部24v给母板供电,母板给其他电路供电;cm4io、io4g板通过90
°
的板间连接器与母板连接,管脚数量50pin;计算板上面包括一个cpu核心板,计算板与核心板通过100pin的板间连接器连接,计算板对外输出的接口包括一个dsi显示输出接口、一个hdmi输出接口、两个usb2.0拓展接口、一个千兆以太网接口、一个type-c接口、一个db15接口(rs485和rs232),还包括tf卡拓展口和一个ssd硬盘拓展接口,type-c接口为内部接口,不对外暴露;所述母板上通过usb2.0接口连接有加密狗,包括加密狗a和加密狗b,两个加密狗分别连接到两个计算板;外设拓展板上面包含一个4g路由器、di、do和led指示灯,4g路由器对外提供wifi网络接入,能够4g拨号上网,计算板a和b通过网络接口与4g路由器板连接,网络接口通过模板的转接,经过了两次50pin的板间连接器;di与do信号同时支持pnp和npn,带光耦隔离;led指示灯包括wifi、4g、供电、运行状态等指示功能,也包含多个可以自由编程设置的可编程led指示灯;
75.进一步的,本实施例中的控制器本体1,采用插卡式扩展底板,内置nvme双固态硬盘和双千兆控制网口,前置系统状态触摸屏112,内置模组技术参数如下:
76.双核心控制模组:
77.·
arm cortex-a72@1.5ghz;
78.·
最大支持8gb内存,32gb内存;
79.·
前置千兆控制以太网口;
80.·
独立nvme固态硬盘;
81.·
双核心模组兼容互换。
82.通讯控制模组:
83.·
内置wifi及路由功能;
84.·
支持nb-iot通讯模组;
85.·
支持4g、5g通讯模组。
86.系统基础模组:
87.·
系统供电及本地i/o端口;
88.·
内部总线扩展。
89.更进一步的,为了使硬件设备可以使用基于iec 61131-3标准的编程环境codesys ide进行编程,必须在对应的硬件设备中移植codesys runtime system,通过在硬件平台上移植runtime,可以将任何嵌入式设备或基于pc的设备转变为符合iec 61131-3标准的工业控制器;
90.codesys代码执行机制为编译执行,即在codesys ide中编写的iec代码,通过集成的编译器编译为机器代码,再通过gateway组件下载到codesys runtime。codesys runtime可以调动硬件平台的资源(如时钟资源、内存资源等)来处理这些指令。
91.codesys runtime移植过程如下:
92.(1)安装带有可用的基本组件和附加组件的codesys实时运行系统工具包;
93.(2)通过引导工具配置和选择实时运行系统所需功能的组件;
94.(3)配置操作系统接口,实现定制驱动程序或集成的附加功能(外部库),连接外部系统等;
95.(4)将所有组件链接和编译到可执行的实时运行系统,并在目标设备上实现运行;
96.(5)在codesys ide中提供用于设备使用的相关文件(如:设备描述文件)。
97.本实施例中,可采用codesys嵌入式软plc系统作为上层用户应用程序的开发系统,结合平台的具体需求进行工业互联网一体化智能控制器的开发,codesys是基于iec61131-3标准,适用于工业控制器和plc组件的编程工具,它支持iec61131-3标准中的五种编程语言,即指令表语言(il)、功能块图(fbd)、梯形图(ld)、结构化文本(st)、顺序功能图(sfc);codesys的最大优点在于它把逻辑控制、运动控制和可视化集成于一体,不需要其他的组态软件就可以轻松实现可视化,使用codesys sp软件包就可以把任何嵌入式或pc设备变成基于iec61131-3标准的codesys可编程逻辑控制器,通过在编译系统中输入i/o站配置表,能自动调整共享区数据结构,而且实时控制内核初始化和通讯调度都封装在该平台内,以实现通讯功能、plc程序的循环实时调用功能、调试功能。
98.具体的,如图3-7所示,所述装夹组件包括:
99.顶部装夹件,用于对控制器本体1顶部进行定位;
100.侧边装夹件,用于对控制器本体1侧边进行定位;
101.所述联动组件分别与顶部装夹件和侧边装夹件联动。
102.其中,所述顶部装夹件包括:
103.定位杆6;
104.第一驱动机构,用于带动定位杆6靠近或远离控制器本体1顶部。
105.所述侧边装夹件包括:
106.侧夹板14;
107.第二驱动机构,用于带动侧夹板14靠近或远离控制器本体1侧壁。
108.较佳的,所述第一驱动机构包括:
109.转动安装于安装壳3内的两个对称的直齿轮2;
110.设于所述直齿轮2上的活动座,所述活动座滑动连接于直齿轮2端面上开设的弧形
滑槽内,定位杆6固定于活动座上;
111.设于弧形滑槽内的第二弹簧7,第二弹簧7一端活动座连接,另一端与弧形滑槽端部连接;
112.直齿轮2转动时,带动活动座转动,活动座带动定位杆6转动至与控制器本体1顶部抵触,随着直齿轮2的转动,第二弹簧7逐渐压缩,弹力增大,使得定位杆6逐渐将控制器本体1顶部抵紧。
113.优选地,所述第二驱动机构包括:
114.转动安装于安装壳3两侧壁上的至少一根螺纹杆10,所述螺纹杆10位于安装壳3内的一端螺纹连接有内螺纹套11;
115.固定连接于内螺纹套11与侧夹板14之间的第三弹簧13;
116.连接于侧夹板14与安装壳3侧壁之间的水平的导向伸缩杆12,用于对侧夹板14进行水平移动导向;
117.螺纹杆10转动时,使得内螺纹套11向靠近侧夹板14运动,带动侧夹板14与控制器本体1侧边抵触,伴随着内螺纹套11的移动,第三弹簧13压缩,弹力增大,使得侧夹板14逐渐将控制器本体1侧边抵紧。
118.本实施例中,所述联动组件包括:
119.水平滑动安装于安装壳3内的两根齿条16,两根齿条16分别与两个直齿轮2啮合;
120.所述安装壳3两侧壁上分别转动安装的外螺旋杆17,外螺旋杆17一端插入临近的齿条16内并与此齿条16螺旋配合;
121.套设于外螺旋杆17上的第一弹簧18,第一弹簧18位于齿条16与安装壳3侧壁之间;
122.连接于外螺旋杆17与螺纹杆10之间的传动件9,外螺旋杆17转动时通过传动件9带动螺纹杆10转动,本实施例中,所述传动件9为齿轮副;
123.设于安装壳3内的背板4,背板4上对称铰接有两根第一连杆19,两根第一连杆19分别与两根齿条16铰接,所述背板4顶部开设有插孔,所述安装壳3顶部竖直穿设有能够插入插孔的插销5,本实施例中,优选所述插销5与安装壳3顶部之间连接有第五弹簧,第五弹簧的弹力使得插销5向下运动,可以在背板4顶部设置斜面,在背板4向后移动时,插销5在斜面的导向下,在第五弹簧作用下自动插入插孔内;
124.使用时,将控制器本体1放在支撑板15上,将控制器本体1向安装壳3内推,控制器本体1推动背板4,背板4通过第一连杆19带动齿条16滑动,齿条16带动直齿轮2转动,同时,齿条16与外螺旋杆17螺旋配合使得外螺旋杆17自转,外螺旋杆17通过传动件9带动螺纹杆10转动,自动进行装夹,装夹完成后插销5插入插孔内将背板4固定,需要取出控制器本体1时,向上拉插销5与插孔分离,在第一弹簧18作用下,齿条16反向移动,通过第一连杆19带动背板4向前运动,逐渐将控制器本体1推出,同时装夹组件逐渐将传感器本体松开。
125.实施例2
126.本实施例与实施例1的不同之处在于,如图8所示,还包括有减震单元,所述减震单元包括:
127.连接于支撑板15和安装壳3底部之间的多根第四弹簧20,多根第四弹簧20间隔设置,本实施例中,所述支撑板15能够上下活动;
128.设于支撑板15和安装壳3底部之间多组减震件,优选所述减震件包括:
129.固定于支撑板15底部的块体22;
130.环向间隔设于安装壳3底部且位于块体22四周的多根z型的弹性片21,所述弹性片21一端延伸至块体22下方,另一端与安装壳3底部接触,弹性片21与安装壳3底部转动连接,通过第四弹簧20能够进行缓冲减震,同时,支撑板15向下震动时,块体22挤压弹性片21,弹性片21的弹力能够进行缓冲减震,同时弹性片21发生转动,将支撑板15向上顶,进一步提高了缓冲减震效果。
131.实施例3
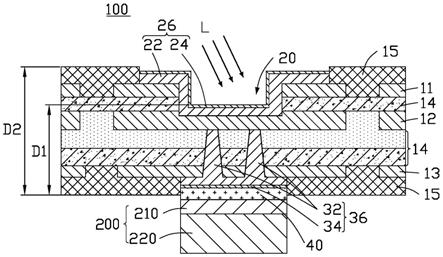
132.本实施例在实施例2的基础上,如图9所示,还包括有散热单元,用于对控制器本体1内部进行散热,所述散热单元包括:
133.固定安装于控制器本体1侧壁上的防尘网24;
134.固定安装控制器本体1内腔且靠近任一防尘网24的风机23,用于加速空气流动带出控制器本体1内的热量;
135.设于控制器本体1内腔顶部和底部的多块间隔的导流弧形板25,所述导流弧形板25一端与控制器本体1铰接,;
136.连接于同一排的多块导流弧形板25之间的连接杆26;
137.设于控制器本体1内腔的动力机构,用于带动导流弧形板25摆动,动力机构驱动连接杆26,导流弧形板25摆动时,将壳体内腔侧边的空气改变角度导向壳体内的电子元件,有利于扩大散热范围同时能够充分对电子元件进行散热,本实施例中,所述动力机构包括盘体27和扇板28,所述安装壳3内远离风机23的一侧转动安装有安装轴,优选两根安装轴分别位于防尘网24两端侧边,所述安装轴端部固定有盘体27,所述盘体27上铰接有第二连杆29,第二连杆29远离盘体27的一端与连接杆26铰接,所述安装轴上环向间隔固定有多块扇板28,风机23吹出的气流冲击扇板28,扇板28带动转轴转动,转轴带动转盘转动,转盘通过第二连杆29带动连接杆26运动,连接杆26带动导流弧形板25摆动,不需要其他额外动力,节约能源。
138.综上所述,本发明提供了一种智能制造用一体化智能控制器,通过设置安装单元,所述安装单元包括安装壳3、支撑板15、装夹组件和联动组件,将控制器本体1放入安装壳3内,通过联动组件带动装夹组件对控制器本体1进行自动装夹,方便快速,提高了工作效率;设有减震单元,所述减震单元包括第四弹簧20和减震件,所述减震件包括块体22和弹性片21,通过第四弹簧20能够进行缓冲减震,支撑板15向下震动时,块体22挤压弹性片21,弹性片21的弹力能够进行缓冲减震,同时弹性片21发生转动,将支撑板15向上顶,进一步提高了缓冲减震效果;设有散热单元,所述散热单元包括防尘网24、风机23、导流弧形板25、连接杆26和动力机构,通过动力机构带动导流弧形板25摆动时,将壳体内腔侧边的空气改变角度导向壳体内的电子元件,有利于扩大散热范围同时能够充分对电子元件进行散热。
139.需要说明的是,对于前述的各实施例,为了简单描述,故将其都表述为一系列的动作组合,但是本领域技术人员应该知悉,本发明并不受所描述的动作顺序的限制,因为依据本发明,某些步骤可能采用其他顺序或者同时进行。其次,本领域技术人员也应该知悉,说明书中所描述的实施例均属于优选实施例,涉及的动作和模块并不一定是本发明所必须的。
140.本技术所提供的几个实施例中,应该理解到,所揭露的装置,可通过其他的方式实
现。例如,以上所描述的装置实施例仅仅是示意性的,例如上述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或通信连接可以是通过一些接口,装置或单元之间的间接耦合或通信连接,可以是电信或者其它的形式。
141.上述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
142.以上实施例仅用以说明本发明的技术方案,而非对发明的保护范围进行限制。显然,所描述的实施例仅仅是本发明部分实施例,而不是全部实施例。基于这些实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明所要保护的范围。尽管参照上述实施例对本发明进行了详细的说明,本领域普通技术人员依然可以在不冲突的情况下,不作出创造性劳动对本发明各实施例中的特征根据情况相互组合、增删或作其他调整,从而得到不同的、本质未脱离本发明的构思的其他技术方案,这些技术方案也同样属于本发明所要保护的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。