1.本实用新型涉及机器人充电技术,具体涉及一种工业机器人电池充电装置。
背景技术:
2.机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。以工业机器人为例,工业机器人需要定期更换两种电池:控制器主板上的电池和机器人本体上的电池。对于控制器主板上的电池,程序和系统变量存储在主板上的sram中,由位于主板上的锂电池供电,以保存数据。当该节电池的电压不足时,则会在示教器上显示报警。当电压变得更低时,sram 中的内容将不能备份,这时需要更换旧电池,并将原先备份的数据重新加载。因此,平时注意用存储卡或软盘定期备份数据。对于机器人本体上的电池,充电锂电池用于给编码器供电,以保存每根轴编码器的数据,因此电池每年都需更换,在电池电压下降报警出现时,允许用户更换电池。若不及时更换,则会出现报警,此时机器人将不能动作,遇到这种情况再更换电池,才能使机器人正常运行,过程繁琐。工业机器人两种电池共同特点:用于给存储数据模块提供电能。不同之处在于主板上的电池更换周期一般很长,而充电锂电池几乎每年都需要更换一次。因此本实用新型主要针对充电锂电池,在电池电量不足时,需要用户手动更换电池,不但增加用户工作量,而且在人手紧缺的工作环境下,如果电池电量不足而未能及时发现,会造成机器人停止工作以及重要数据丢失,从而影响工作效率。再者,更换电池通常用原装电池,成本高,对操作者也需要具备专业技能。
技术实现要素:
3.有鉴于此,本实用新型的目的是提供一种机器人充电电池装置,作为机器人充电锂电池使用。
4.本实用新型采取的具体技术方案是:
5.一种工业机器人电池充电装置,包括主控制器模块和充电模块,所述主控制器模块包括电压检测模块和报警模块,所述报警模块包括led灯和蜂鸣器;所述充电模块包括充电锂电池、充电电路和移动电源,所述充电锂电池通过所述充电电路与所述移动电源连接,进行充电;所述电压检测模块与所述充电锂电池耦合,所述报警模块与所述电压检测模块耦合,电压检测模块用于检测充电锂电池电压状态,并生成电压信号传送给报警模块。
6.进一步地,所述led灯模块包括1个led灯,该led指示灯属于三色led,可亮红色、绿色和蓝色。
7.进一步地,所述充电电路连接所述移动电源输出端,所述移动电源输出端设有一个或多个不同类型的接口。
8.进一步地,所述led灯和蜂鸣器通过开关电源模块与机器人本体内部电路连接,由机器人本体内部电源进行供电。
9.进一步地,所述移动电源为充电宝。
10.进一步地,充电电路为一拖三线数据线,一为usb输出端,连接移动电源输出端,三线分别为三个充电插头。
11.进一步地,蜂鸣器采用有源蜂鸣器。
12.进一步地,电压检测模块、led指示灯、蜂鸣器和充电电路可集成在一块电路板上,进行合理pcb布线,减小板面积以节约空间。
13.相比于现有技术,本实用新型的有益效果是:
14.1.采用报警实时监控,确保电池电量,避免数据丢失。
15.2.无需拆装,节约人力。
附图说明
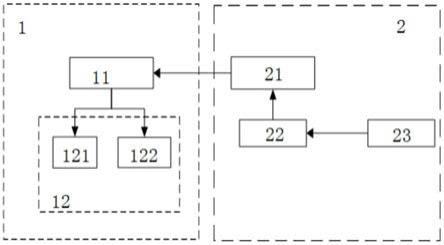
16.图1为工业机器人电池充电装置的结构框图;
17.图2为移动电源与三线插头示意图。
18.图3为机器人自动充电逻辑框图。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1,本实施例提供了一种工业机器人电池充电装置,包括主控制器模块1和充电模块2,所述主控制器模块1包括电压检测模块11和报警模块12,所述报警模块12包括led灯121和蜂鸣器122;所述充电模块2包括充电锂电池21、充电电路22和移动电源23,所述充电锂电池21通过所述充电电路22与所述移动电源23连接,进行充电;所述电压检测模块11与所述充电锂电池21耦合,所述报警模块12与所述电压检测模块11耦合,电压检测模块11用于检测充电锂电池21电压状态,并生成电压信号传送给报警模块12(led灯121和蜂鸣器122)。
21.电压检测模块是系统的控制核心,主要用于处理分析数据,并输出控制信号,本实施例的电压检测模块采用stc12c5604ad单片机模块,检测模拟量电压范围0~10v,由机器人本体内部开关电源提供电能,工作电压为10-12v,稳定性极高。
22.电压检测模块与报警模块耦合,用于检测机器人的电池电压状态,并生成电压信号送给报警模块。检测模块内部存储有低电压预设定值和电压标准值,在电压信号低于低电压预设定值时,电压检测模块输出驱动信号到报警模块,报警模块发出警报,提示充电请求信号,提醒人员在充电端口插上移动电源,开始充电;在电压信号达到电压标准值时,移除移动电源,停止充电。
23.led灯和蜂鸣器通过开关电源模块与机器人本体内部电路连接,由机器人本体内部电源进行供电,开关电源与机器人本体内部电路连接,开关电源将 220v交流电转换为稳定的5v或者12v直流电,为报警模块中的led灯和蜂鸣器提供电能,本实施例,电源模块采用inn3673c-h601双路开关电源芯片,可将 220v转为5v和12v。
24.本实施例采用三基色led灯,可亮红绿蓝三色,共阴极,蜂鸣器采用有源蜂鸣器,内
部带有振荡源,报警模块给引脚一个低电平信号,蜂鸣器就会直接响。
25.充电锂电池连接移动电源输出端,如图2所示,移动电源输出端有三个接线头,分别为mrcio安卓、type-c和苹果lighting接口,也可以根据实际需要节约空间和成本,只选择其中一种充电连接头。充电电路为一拖三线数据线,一为usb输出端,连接移动电源输出端,三线分别为三个充电插头充电模块中锂电池采用串联集成方式,总电压7.2v。
26.根据上述机器人充电装置,本实施例的充电控制方法包括如下步骤。
27.第一步:利用电压检测模块实时检测机器人的电池电压状态,并生成电压信号传送给报警模块;
28.第二步:报警模块根据电压信号判断电池电压值是否低于设定值,当低于时,led指示红色灯闪烁,蜂鸣器响,提醒工作人员插上移动电源,电池进入充电状态,led指示绿色常亮;
29.第三步:当电压检测模块检测到电池电压达到设定值时,报警模块中led 灯蓝色灯闪烁,提醒人员充电完成,可以移除移动电源,当人员移走移动电源,充电停止,led灯灭。
30.机器人自动充电逻辑如图3所示。
31.综上所述,本机器人自主充电装置及充电方法具有以下优势:
32.1、可以移植到不同品牌型号之上,适用范围广。
33.2、实时监控电池电量,及时充电,确保数据存储不丢失。
34.3、无需拆装,降低风险,节省人力。
35.4、不需定期频繁更换原装电池,节省成本。
36.5、通过设置继电器模块,平时无充电时为断电状态,可保证系统的安全。需要指出的是,上述较佳实施例仅为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所作的等效变化或修饰,都应涵盖在本实用新型的保护范围之内。
37.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
