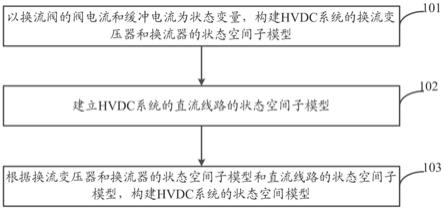
一种hvdc系统的状态空间模型构建方法及仿真方法
技术领域
1.本发明涉及性能仿真技术领域,特别是涉及一种hvdc系统的状态空间模型构建方法及仿真方法。
背景技术:
2.高压直流输电(high voltage direct current,hvdc)以其可实现交流电网的异步连接、控制灵活性强等特点正得到快速发展和广泛应用。特别是随着大范围能源优化配置、大规模可再生能源发电并网等需求的扩大,直流输电工程项目得到快速实施。
3.研究成果表明,hvdc的详细模型采用准稳态方程,这难以准确描述换流站附近的不对称短路故障所引起的hvdc动态行为以及逆变器交流侧不对称故障或换流变压器饱和可能引起的换相失败故障。在准稳态模型的基础上,引入动态相量法进行hvdc解析建模,用开关函数表示桥臂开关状态,仿真精确程度介于准稳态模型和电磁暂态仿真模型之间。电磁暂态仿真通常用来分析hvdc系统发生故障时的暂态响应过程和具体控制特性,当要求得到考虑换流阀的hvdc准确时域响应时,需要使用较小的积分步长,计算速度慢。
4.为了提升电磁暂态仿真速度,且为了配合在交直流混联和直流馈入式电力系统的混合仿真中的相应接口技术,目前相关研究提出建立结构化子系统线性状态空间模型来准确描述hvdc输电系统,并通过联接矩阵将各子系统互联构建全系统线性化建模的方法,该方法为采用状态空间法求解hvdc系统数学模型的解析算法,模型可精确到阀级,计算速度快于电磁暂态仿真,在追求更高精度的同时解决了计算规模问题。
5.然而,目前状态空间法建立直流系统模型没有考虑缓冲电路,当缓冲回路时间常数大于仿真步长时,缓冲电流在阀关断期间的突变峰值会在交直流回路的电感上产生不可忽略的感应电压,尤其对于直流回路来说,感应电压会随着周期叠加,会使晶闸管关断时直流电流仿真结果存在较大误差。
技术实现要素:
6.本发明的目的是提供一种hvdc系统的状态空间模型构建方法及仿真方法,以提高晶闸管关断时hvdc系统暂态仿真结果的准确性。
7.为实现上述目的,本发明提供了如下方案:
8.本发明提供一种hvdc系统的状态空间模型构建方法,所述构建方法包括如下步骤:
9.以换流阀的阀电流和缓冲电流为状态变量,构建hvdc系统的换流变压器和换流器的状态空间子模型;
10.建立hvdc系统的直流线路的状态空间子模型;
11.根据换流变压器和换流器的状态空间子模型和直流线路的状态空间子模型,构建hvdc系统的状态空间模型。
12.可选的,以换流阀的阀电流和缓冲电流为状态变量,构建hvdc系统的换流变压器
和换流器的状态空间子模型为:
[0013][0014]
其中,g为用晶闸管阀电流表示变压器阀侧线电流的关联矩阵,i
val
为换流阀的阀电流,i
sub
为换流阀的缓冲电流,r
val
为晶闸管等效电阻,u
s(l
‑
l)
为变压器网侧线电压;
[0015]
l
ac
为变压器的一次侧等值电感l
d
和二次侧等值电感l
y
组成的参数矩阵,
[0016]
m为由线电压变换关系导出的系数矩阵,
[0017]
f1和f2分别为用换流阀阀电压表示变压器阀侧线电压的第一关联矩阵和第二关联矩阵,f
1_0
为,f
2_0
为整流侧换流阀阀电压表示变压器阀侧线电压的变换关系导出的第一系数矩阵和第二系数,
[0018]
k为换流变压器变比组成的参数矩阵,k
y
和k
d
为y
‑
y、y
‑
δ联结换流变压器的变比。
[0019]
可选的,建立hvdc系统的直流线路的状态空间子模型为:
[0020][0021]
其中,l
dc
为直流线路的等效电感,c
dc
为直流线路的中点对地电容,r
dc
为直流线路的等效电阻,u
dc
为直流线路的中点电容电压,i
dcr
为整流侧直流电流,i
dci
为逆变侧直流电流,u
dcr
为整流侧直流电压,u
dci
为逆变侧直流电压。
[0022]
可选的,根据换流变压器和换流器的状态空间子模型和直流线路的状态空间子模型,构建hvdc系统的状态空间模型为:
[0023][0024]
其中,x为状态变量,u为控制变量,x=[i
valr
,i
subr
,i
vali
,i
subi
,u
dc
]
t
,u=[u
sr(l
‑
l)
,u
si(l
‑
l)
]
t
;i
valr
和i
subr
分别为整流侧换流阀的阀电流和缓冲电流,i
vali
和i
subi
分别为逆变侧
换流阀的阀电流和缓冲电流,u
sr(l
‑
l)
和u
si(l
‑
l)
分别为整流侧和逆变侧的变压器网侧线电压。
[0025]
a、b和c分别为第一参数矩阵、第二参数矩阵和第三参数矩阵;
[0026][0027][0028][0029]
l
acr
和l
aci
分别为整流侧和逆变侧的变压器的一次侧等值电感和二次侧等值电感组成的参数矩阵、c
sub
为缓冲回路电容、r
sub
为缓冲回路电阻;
[0030]
r
valr
和r
vali
分别为整流侧和逆变侧的晶闸管等效电路、e为单位矩阵,n为用阀电压表示直流电压的系数关联矩阵、j为用阀电流表示直流电流的系数关联矩阵、j1为采用y
‑
y联结的换流变压器阀1、3、5导通时,阀电流表示直流电流的系数关联矩阵;
[0031]
k
r
和k
i
分别表示整流侧和逆变侧的换流变压器变比组成的参数矩阵。
[0032]
一种hvdc系统的状态空间模型构建系统,所述构建系统包括:
[0033]
状态空间子模型构建模块,用于以换流阀的阀电流和缓冲电流为状态变量,构建hvdc系统的换流变压器和换流器的状态空间子模型;
[0034]
状态空间子模型构建模块,用于建立hvdc系统的直流线路的状态空间子模型;
[0035]
状态空间模型构建模块,用于根据换流变压器和换流器的状态空间子模型和直流线路的状态空间子模型,构建hvdc系统的状态空间模型。
[0036]
一种基于状态空间模型的hvdc系统性能仿真方法,所述仿真方法包括如下步骤:
[0037]
根据hvdc系统的主设备的状态确定状态空间模型的初始的参数矩阵;
[0038]
根据所述参数矩阵求解所述状态空间模型的状态变量;
[0039]
根据所述状态变量确定hvdc系统的控制层所需的第一主设备电气量和表征hvdc系统的第二设备层电气量;所述第一主设备电气量包括:整流侧的直流电流、逆变侧的直流电流、直流电压和上桥臂和下桥臂的最小熄弧角;
[0040]
将所述第一主设备电气量输入所述控制系统,获取控制系统输出的触发信号;
[0041]
根据所述触发信号更新所述状态空间模型的参数矩阵,返回步骤“根据所述参数矩阵求解所述状态空间模型的状态变量”,直到满足终止条件,输出每次迭代确定的第二设备层电气量。
[0042]
可选的,所述将所述第一主设备电气量输入所述控制系统,获取控制系统输出的触发信号,具体包括:
[0043]
根据第一主设备电气量中的整流侧直流电流确定整流侧的触发角;
[0044]
根据第一主设备电气量中的逆变侧的直流电流、直流电压和上桥臂和下桥臂的最小熄弧角,确定逆变侧的触发角;
[0045]
根据整流侧的触发角和逆变侧的触发角与锁相环输出相角的比较结果生成触发信号。
[0046]
可选的,所述第一主设备电气量包括:整流侧的直流电流i
dcr
、逆变侧的直流电流i
dci
、直流电压u
dci
、上桥臂和下桥臂的最小熄弧角;
[0047]
根据所述状态变量确定hvdc系统的控制层所需的第一主设备电气量,具体包括:
[0048]
根据状态变量中的整流侧换流阀的阀电流i
valr
和缓冲电流i
subr
,利用公式计算整流侧直流电流i
dcr
;
[0049]
根据状态变量中的逆变侧换流阀的阀电流i
vali
和缓冲电流i
subi
,利用公式计算逆变侧直流电流i
dci
;
[0050]
根据状态变量中的逆变侧换流阀的阀电流i
vali
和缓冲电流i
subi
,利用公式计算逆变侧换流阀的阀电压u
vali
;
[0051]
逆变侧换流阀的阀电压u
vali
,利用公式u
dci
=nu
vali
,计算逆变侧直流电压u
dci
;
[0052]
其中,j为用整流侧阀电流表示直流电流的系数关联矩阵,j'表示逆变侧阀电流表示直流电流的系数关联矩阵,r
valr
和r
vali
分别为整流侧和逆变侧的晶闸管等效电路,n为用阀电压表示直流电压的系数关联矩阵。其中,逆变侧上下桥臂的最小熄弧角γ
min
工程中一般为定值,可根据实际情况直接输入,无需参与迭代计算。
[0053]
可选的,所述第二主设备电气量包括:稳定运行条件下的整流侧换流阀的阀电流和缓冲电流,逆变侧换流阀的阀电流和缓冲电流、直流线路的中点电容电压;故障下的整流侧直流电流、逆变侧直流电流、直流线路的中点电容电压;闭锁工况下的直流侧触发角、逆变侧触发角和逆变侧有功功率。
[0054]
一种基于状态空间模型的hvdc系统性能仿真系统,所述仿真系统包括:
[0055]
初始化模块,用于根据hvdc系统的主设备的状态确定状态空间模型的初始的参数矩阵;
[0056]
状态变量求解模块,用于根据所述参数矩阵求解所述状态空间模型的状态变量;
[0057]
电气量确定模块,用于根据所述状态变量确定hvdc系统的控制层所需的第一主设备电气量和表征hvdc系统的第二设备层电气量;所述第一主设备电气量包括:整流侧的直流电流、逆变侧的直流电流、直流电压和上桥臂和下桥臂的最小熄弧角;
[0058]
触发信号获取模块,用于将所述第一主设备电气量输入所述控制系统,获取控制
系统输出的触发信号;
[0059]
参数矩阵更新模块,用于根据所述触发信号更新所述状态空间模型的参数矩阵,返回步骤“根据所述参数矩阵求解所述状态空间模型的状态变量”,直到满足终止条件,输出每次迭代确定的第二设备层电气量。
[0060]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0061]
本发明公开了一种hvdc系统的状态空间模型构建方法,所述构建方法包括如下步骤:以换流阀的阀电流和缓冲电流为状态变量,构建hvdc系统的换流变压器和换流器的状态空间子模型;建立hvdc系统的直流线路的状态空间子模型;根据换流变压器和换流器的状态空间子模型和直流线路的状态空间子模型,构建hvdc系统的状态空间模型。本发明以阀电流和缓冲电流作为状态变量对晶闸管进行建模,更贴近晶闸管元件特性,模型精度更高,并且可以模拟换流站闭锁等工况。同时计算结果数值稳定性比较高,解决了晶闸管关断时直流电流仿真结果存在较大误差这一问题,提高了晶闸管关断时hvdc系统暂态仿真结果的准确性。
[0062]
本发明将换流变压器不同工况的电压变换关系通过f、g、j、n等关联矩阵概括为统一形式,通过晶闸管等效电阻阻值的改变更新工况,参数矩阵不随工况变化而发生改变。
附图说明
[0063]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0064]
图1为本发明实施例1提供的一种hvdc系统的状态空间模型构建方法的流程图;
[0065]
图2为本发明实施例1提供的hvdc系统的主设备的结构图;
[0066]
图3为本发明实施例1提供的换流阀的等效电路图;
[0067]
图4为本发明实施例2提供的基于状态空间模型的hvdc系统性能仿真方法的原理图;
[0068]
图5为本发明实施例2提供的整流侧控制系统的控制原理图;
[0069]
图6为本发明实施例2提供的逆变侧控制系统的控制原理图;
[0070]
图7为本发明实施例2提供的锁相环的控制原理图;
[0071]
图8为本发明实施例5提供的稳态运行条件下的仿真结果对比图,图5中的(a)、(b)、(c)、(d)和(e)分别为稳态运行条件下的整流侧阀电流、整流侧缓冲电流、逆变侧阀电流、逆变侧缓冲电流和直流线路中点电压的对比波形图;
[0072]
图9为本发明实施例5提供的对称故障时的仿真结果对比图;图9中的(a)、(b)和(c)分别为对称故障时的整流侧直流电流、逆变侧直流电流和直流线路中点电压的对比波形图;
[0073]
图10为本发明实施例5提供的非对称故障时的仿真结果对比图;图10中的(a)、(b)和(c)分别为非对称故障时的整流侧直流电流、逆变侧直流电流和直流线路中点电压的对比波形图;
[0074]
图11为本发明实施例5提供的直流系统双极闭锁时的仿真结果对比图;图11中的
(a)、(b)和(c)分别为直流系统双极闭锁时的整流侧触发角、逆变侧触发角和逆变侧有功功率的对比波形图。
具体实施方式
[0075]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0076]
本发明的目的是提供一种hvdc系统的状态空间模型构建方法及仿真方法,以提高晶闸管关断时hvdc系统暂态仿真结果的准确性。
[0077]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0078]
实施例1
[0079]
如图1所示,本发明提供了一种hvdc系统的状态空间模型构建方法,该构建方法的状态空间模型采用的是基于pscad的国际大电网会议(international council on large electric systems,cigre)直流输电标准系统,主设备系统结构如图2所示,包括整流侧换流器模型、直流线路模型和逆变侧换流器模型三部分,忽略直流滤波器。图2中:l
dc
、c
dc
、r
dc
分别为直流线路的电感、电容和电阻;u
dc
为直流线路中点电容电压;i
dcr
和i
dci
分别为整流侧和逆变侧的直流电流。该构建方法按照上图所示,分别对整流侧换流器及换流变压器、直流线路、逆变侧换流器及换流变压器进行建模,其中对于换流侧、逆变侧的换流器考虑了缓冲回路的影响进行建模,再将各个子模型进行联立。
[0080]
如图1所示,所述构建方法包括如下步骤:
[0081]
步骤101,以换流阀的阀电流和缓冲电流为状态变量,构建hvdc系统的换流变压器和换流器的状态空间子模型。
[0082]
如图3所示,建立换流阀状态空间模型为:
[0083][0084][0085]
r
val
为晶闸管等效电阻,i
val
是换流阀的阀电流,i
sub
是换流阀的缓冲电流,c
sub
为缓冲回路电容,r
sub
为缓冲回路电阻,e为单位阵。
[0086]
通过两个方程就可描述变压器对两侧线电压的变换关系:
[0087][0088][0089]
式中,l
d
和l
y
为变压器等值电感,i
ya
、i
yb
、i
yc
和i
da
、i
db
、i
dc
为变压器阀侧y
‑
y联结和
y
‑
δ联结线电流,u
yab
、u
ybc
、u
yca
和u
dab
、u
dbc
、u
dca
为变压器阀侧y
‑
y联结和y
‑
δ联结线电压,u
sab
、u
sbc
、u
sca
为变压器网侧线电压,k
y
和k
d
为y
‑
y、y
‑
δ联结换流变压器的变比。通过合并该变化关系可得:
[0090][0091]
其中,l
ac
为变压器等值电感l
d
和l
y
组成的参数矩阵,i
y
和i
d
为变压器阀侧线电流,u
y(l
‑
l)
和u
d(l
‑
l)
为变压器阀侧y
‑
y、y
‑
δ联结线电压,u
s(l
‑
l)
为变压器网侧线电压。m为由线电压变换关系导出的系数矩阵,k为换流变压器变比组成的参数矩阵。且参数矩阵为:
[0092][0093]
然后建立换流变压器和换流器的状态空间子模型:
[0094][0095]
其中,
[0096][0097]
步骤102,建立hvdc系统的直流线路的状态空间子模型。
[0098]
以图2所示主设备直流线路,建立直流线路的状态空间子模型:
[0099][0100]
步骤103,根据换流变压器和换流器的状态空间子模型和直流线路的状态空间子模型,构建hvdc系统的状态空间模型。
[0101]
通过步骤101建立的整流侧换流器及换流变压器、逆变侧换流器及换流变压器的状态空间子模型与步骤2建立的直流线路的状态空间子模型相配合,采用matlab建立全系统状态空间模型。
[0102]
将前两个步骤的子模型互联,即可得到全系统的状态空间模型:
[0103][0104]
式中,x=[i
valr
,i
subr
,i
vali
,i
subi
,u
dc
]
t
,u=[u
sr(l
‑
l)
,u
si(l
‑
l)
]
t
,参数矩阵a、b、c为:
[0105][0106][0107][0108]
实施例2
[0109]
本发明还提供一种hvdc系统的状态空间模型构建系统,所述构建系统包括:状态空间子模型构建模块,用于以换流阀的阀电流和缓冲电流为状态变量,构建hvdc系统的换流变压器和换流器的状态空间子模型;状态空间子模型构建模块,用于建立hvdc系统的直流线路的状态空间子模型;状态空间模型构建模块,用于根据换流变压器和换流器的状态空间子模型和直流线路的状态空间子模型,构建hvdc系统的状态空间模型。
[0110]
实施例3
[0111]
本发明还提供一种基于状态空间模型的hvdc系统性能仿真方法,实施例1和2建立的状态空间模型配合控制系统完成整个hvdc输电系统的仿真计算。主设备需要向控制系统提供整流侧直流电流i
dcr
、逆变侧直流电流i
dci
、逆变侧直流电压u
dci
和逆变侧上下桥臂的最小熄弧角γ
min
。控制系统通过串行计算出的触发角α
r
、α
i
,与锁相环输出的相角θ比较判断是否生成导通信号,从而更新换流器的阀电阻阻值,更新全系统状态空间表达式中的参数矩阵a、b、c,完成对状态变量的求解再通过状态变量求解出控制系统所需的主设备电气量,如此循环往复地进行数据交互,最终得到双端12脉波hvdc系统的仿真结果。
[0112]
主设备与控制系统相互配合、串行计算的过程,称为主设备的空间状态模型与控制系统的数据交互过程。图4展示了主设备的空间状态模型与控制系统配合计算从而得到仿真结果的步骤。图4中参数矩阵a、b、c表示状态空间模型的系数矩阵,下标表示迭代的次数,图4示意了一次系统与控制系统的数据交互与交替求解过程,最终在matlab中可以求得全系统状态空间模型的解。
[0113]
所述仿真方法包括如下步骤:
[0114]
根据hvdc系统的主设备的状态确定状态空间模型的初始的参数矩阵;据所述参数
矩阵求解所述状态空间模型的状态变量;根据所述状态变量确定hvdc系统的控制层所需的第一主设备电气量和表征hvdc系统的第二设备层电气量;所述第一主设备电气量包括:整流侧的直流电流、逆变侧的直流电流、直流电压和上桥臂和下桥臂的最小熄弧角;将所述第一主设备电气量输入所述控制系统,获取控制系统输出的触发信号;根据所述触发信号更新所述状态空间模型的参数矩阵,返回步骤“根据所述参数矩阵求解所述状态空间模型的状态变量”,直到满足终止条件,输出每次迭代确定的第二设备层电气量。
[0115]
其中,所述将所述第一主设备电气量输入所述控制系统,获取控制系统输出的触发信号,具体包括:
[0116]
根据第一主设备电气量中的整流侧直流电流确定整流侧的触发角。
[0117]
触发角即触发延迟角,定义为从自然换相点到晶闸管阀的门级上施加触发信号这段时间所对应的电角度,交流系统等效线电压的过零点处记为自然换相点。触发角被用来调压,与一般晶闸管调压系统一样,采用相位控制,通过改变触发脉冲的延迟角,来获得与逆变器输出频率相对应的不同大小的直流电压。
[0118]
如图5为整流侧控制系统,得到整流侧的触发角α
r
与整流侧的触发超前角(即熄弧角)β
r
的关系为α
r
=π
–
βr。
[0119]
根据第一主设备电气量中的逆变侧的直流电流、直流电压和上桥臂和下桥臂的最小熄弧角,确定逆变侧的触发角。
[0120]
图6为逆变侧控制系统,得到输出的逆变侧触发角与逆变侧触发超前角关系为α
i
=π
–
β
i
。
[0121]
根据整流侧的触发角和逆变侧的触发角与锁相环输出相角的比较结果生成触发信号。
[0122]
晶闸管导通的条件是,阳极电位高于阴极点位,同时门级上施加触发信号才能导通。
[0123]
如图7所示,输入电压信号为u
a
、u
b
、u
c
,经过克拉克变换后得到u
α
和u
β
,再经过反正切和pi控制环节后得到从0
°
~360
°
变化的斜坡信号θ,相位上与输入电压信号u
a
锁相。当触发角α大于锁相环输出相角θ时,便生成触发信号。
[0124]
所述第一主设备电气量包括:整流侧的直流电流i
dcr
、逆变侧的直流电流i
dci
、直流电压u
dci
、上桥臂和下桥臂的最小熄弧角;
[0125]
以直流电流为例,根据所述状态变量确定hvdc系统的控制层所需的第一主设备电气量,具体包括:
[0126][0127]
直流电压u
dc
可表示为阀电压:
[0128]
u
dc
=nu
val
[0129]
而阀电压可用状态变量表示:
[0130][0131]
因此通过状态空间模型对状态变量求解后,便可得到控制系统所需的输入电气量。另外,逆变侧上下桥臂的最小熄弧角γ
min
工程中一般为定值,可根据实际情况直接输
入,无需参与迭代计算。
[0132]
所述第二主设备电气量包括:稳定运行条件下的整流侧换流阀的阀电流和缓冲电流,逆变侧换流阀的阀电流和缓冲电流、直流线路的中点电容电压;故障下的整流侧直流电流、逆变侧直流电流、直流线路的中点电容电压;闭锁工况下的直流侧触发角、逆变侧触发角和逆变侧有功功率。具体得到的结果,可参见实施例5。
[0133]
实施例4
[0134]
本发明还提供一种基于状态空间模型的hvdc系统性能仿真系统,所述仿真系统包括:
[0135]
初始化模块,用于根据hvdc系统的主设备的状态确定状态空间模型的初始的参数矩阵;
[0136]
状态变量求解模块,用于根据所述参数矩阵求解所述状态空间模型的状态变量;
[0137]
电气量确定模块,用于根据所述状态变量确定hvdc系统的控制层所需的第一主设备电气量和表征hvdc系统的第二设备层电气量;所述第一主设备电气量包括:整流侧的直流电流、逆变侧的直流电流、直流电压和上桥臂和下桥臂的最小熄弧角;
[0138]
触发信号获取模块,用于将所述第一主设备电气量输入所述控制系统,获取控制系统输出的触发信号;
[0139]
参数矩阵更新模块,用于根据所述触发信号更新所述状态空间模型的参数矩阵,返回步骤“根据所述参数矩阵求解所述状态空间模型的状态变量”,直到满足终止条件,输出每次迭代确定的第二设备层电气量。
[0140]
实施例5
[0141]
为了验证本发明的技术效果,本发明还提供了如下具体的实施例。
[0142]
表1标准算例系统参数
[0143][0144]
仿真系统参数如表1所示,本方法的仿真结果如下。
[0145]
在稳态运行条件下,hvdc系统整流侧状态变量、逆变侧状态变量和直流线路中点电压波形如图8所示。
[0146]
为了得到本文所建模型在故障发生时的暂态响应,故障分别设置为对称故障、非对称故障和直流系统双极闭锁。本模型与pscad的整流侧直流电流、直流线路中点电压以及逆变侧直流电流波形对比,如图9、10所示。
[0147]
本发明的仿真方法与pscad仿真结果重合度较高,现将稳态相对误差数值列于表2。对称和非对称故障响应相对误差数值列于表3。
[0148]
表2稳态响应相对误差
[0149][0150]
表3故障响应相对误差
[0151][0152]
另外,本发明的状态空间模型还能模仿换流站闭锁工况,闭锁工况下的各电气量波形如图11所示。
[0153]
由上述仿真结果可知,本发明所建的状态空间模型状态变量在0~3s内的最大绝对误差在10
‑6ka以下,直流线路中点电压最大绝对误差在10
‑4kv以下,在模型精确到阀级的基础上,提高了计算精度。以晶闸管的阀电流和缓冲电流为状态变量,实现了对考虑缓冲回路的hvdc输电系统状态空间模型的求解,一次系统求解精度可达99.99%,同时计算结果数值稳定性高。证明了本模型能够有效提高状态空间解析法的计算精度、减小误差。
[0154]
另外,本发明的状态空间模型模拟闭锁工况拟合程度较高,为进一步研究其他故障情况下考虑缓冲回路的状态空间计算打下基础。
[0155]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
[0156]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。