70度。
13.另外,所述支撑结构包括间隔设置的第一支撑块及第二支撑块,所述第一支撑块及第二支撑块均设有支撑面,所述第一支撑块的支撑面与第二支撑块的支撑面相向倾斜设置。
14.另外,所述第一支撑块靠近对应的所述转动模组设置,所述第二支撑块远离对应的所述转动模组设置。
15.本实用新型实施方式的单侧双轮移车器相对于相关技术而言,通过一个机架上设置两个支撑结构,可以同时对单侧的两个轮子使用,两个单侧双轮移车器即可以升起四个轮子移走小车,减少了一半的工作量。
附图说明
16.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
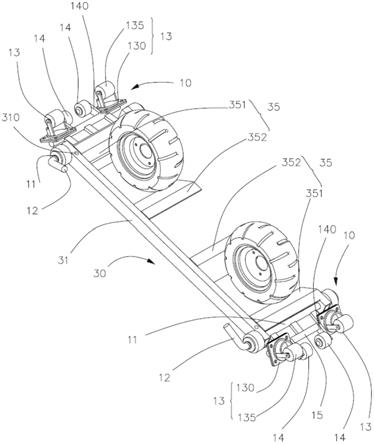
17.图1为本实用新型的一实施例的单侧双轮移车器的立体示意图,其中单侧双轮移车器处于未使用状态;
18.图2为图1的单侧双轮移车器的一部分的放大示意图;
19.图3为图1的单侧双轮移车器的示意图,其中单侧双轮移车器处于使用的支撑状态;
20.图4为图1的单侧双轮移车器的滚轮、延伸座、万向轮相对翻转杆的位置关系示意图。
具体实施方式
21.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本申请而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本申请所要求保护的技术方案。
22.本实用新型的一实施方式涉及一种单侧双轮移车器,本实施方式的核心在于,包括机架及分别设置于所述机架两端的两个转动模组;所述机架包括连杆本体及设于连杆本体同一侧延伸的且前后间隔的两个支撑结构,两所述支撑结构分别用于插入前后两车轮之下;所述转动模组包括枢接于所述连杆本体的一端的转轴、连接转轴的撬杠及连接该转轴且在摆向地面时撑起所述支撑结构的滚轮。
23.下面对本实施方式的单侧双轮移车器的实现细节进行具体的说明,以下内容仅为方便理解提供的实现细节,并非实施本方案的必须。
24.请参考图1至图3,为本实用新型的一实施例的单侧双轮移车器,用于对机器人如多功能安保巡逻物流递送机器人,对机器人的抬升搬运。该单侧双轮移车器包括机架30及分别设置于所述机架30两端的两个转动模组10;所述机架30包括连杆本体31及设于连杆本体31同一侧延伸的且前后间隔的两个支撑结构35,两所述支撑结构35分别用于插入前后两
车轮之下;各所述转动模组10包括枢接于所述连杆本体31的一端的转轴11、连接转轴11的撬杠12及连接该转轴11且在摆向地面时撑起所述支撑结构35的滚轮14。在本实施例中,该滚轮14为辅助轮;在其它实施例中,该滚轮14也可以为万向轮。
25.所述连杆本体31对应转动模组10设有定位孔310;所述机架30还包括定位销41,所述定位销41用于安装在定位孔310以对所述转动模组10进行限位以使所述转动模组10保持支撑于地面的支持状态。在本实施例中,除了滚轮14,所述转动模组10还包括万向轮13,所述万向13上具有限位结构139,所述限位结构139用于当所述转动模组10处于支撑于地面的支持状态时供所述定位销41卡掣以保持该支撑状态。
26.各所述支撑结构35包括间隔设置的第一支撑块351及第二支撑块352,所述第一支撑块351及第二支撑块352均设有支撑面,所述第一支撑块351的支撑面与第二支撑块352的支撑面相向倾斜设置。所述第一支撑块351靠近对应的所述转动模组10设置,所述第二支撑块352远离对应的所述转动模组10设置。在本实施例中,连杆本体31呈长杆状设置,各第一支撑块351及第二支撑块352自连杆本体31的同一侧垂直延伸设置。
27.在本实施例中,所述万向轮13及滚轮14绕对应的所述转轴11沿周向间隔分布,以使得当所述转轴11转动时,先是所述滚轮14摆向地面时撑起所述支撑结构35,然后所述滚轮14继续摆动脱离地面,由所述万向轮13着地支撑所述支撑结构35。
28.具体地,所述转动模组10还包括连接所述转轴11的翻转杆15,所述万向轮13与滚轮14分别与所述翻转杆15固定连接。所述翻转杆15与所述转轴11平行间隔设置,所述翻转杆15与转轴11通过多个连接条连接。在本实施例中,每一个转动模组10包括两个万向轮13及两个滚轮14;所述万向轮13分别位于翻转杆15的两端,所述滚轮14分别位于翻转杆15的两端;在本实施例中,所述滚轮14位于两个万向轮13之间。
29.所述滚轮14包括自所述翻转杆15沿径向延伸的延伸座140,所述滚轮14枢接在所述延伸座140上;所述万向轮13包括固定在所述翻转杆15的轮座(图未标)、安装在轮座上的旋转座130及枢接在旋转座130上的主轮135。所述限位结构139设置在轮座背向主轮135的一侧。所述滚轮14的中心轴与所述延伸座140的延伸方向垂直;所述主轮135的中心轴与旋转座130的旋转中心线垂直;所述延伸座140的延伸方向与旋转座130的旋转中心线所成的夹角为20-70度(如图4所示)。
30.使用时,将本实用新型的单侧双轮移车器放入到机器人的一侧并对应两个轮子,通过分别转动两端的所述转动模组10对应机架30及两个支撑结构35的抬升;转动过程中,由于所述万向轮13及滚轮14绕对应的所述转轴11沿周向间隔分布,即延伸座140的延伸方向与旋转座的旋转中心线131相对翻转杆15呈夹角a,因此所述滚轮14先着地并撑起所述支撑结构35,然后所述滚轮14随着转轴11转动继续摆动脱离地面,换为由所述万向轮13着地支撑所述支撑结构35。支撑结构35在升起来的过程中将机器人的一侧的前后两车轮进行抬升。最后,分别将定位销41安装在两边的定位孔351以对万向轮13的轮座进行限位。之所以同时设置滚轮和万向轮是因为:万向轮活动自由度高更利于搬运移动,但万向轮本身的结构强度较低,用万向轮来实现撑起损坏可能较大。因此增加滚轮作为辅助,滚轮只需要一个转动维度,强度比万向轮更高。两者结合实现顺利撑起与灵活移动。
31.本实用新型实施方式的单侧双轮移车器相对于相关技术而言,通过一个机架上设置两个支撑结构,可以同时对单侧的两个轮子使用,两个单侧双轮移车器即可以升起四个
轮子移走小车,减少了一半的工作量。
32.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
技术特征:
1.一种单侧双轮移车器,其特征在于,包括机架及分别设置于所述机架两端的两个转动模组;所述机架包括连杆本体及设于连杆本体同一侧延伸的且前后间隔的两个支撑结构,两所述支撑结构分别用于插入前后两车轮之下;所述转动模组包括枢接于所述连杆本体的一端的转轴、连接转轴的撬杠及连接该转轴且在摆向地面时撑起所述支撑结构的滚轮。2.根据权利要求1所述的单侧双轮移车器,其特征在于,所述连杆本体对应转动模组设有定位孔;所述机架还包括定位销,所述定位销用于安装在定位孔以对所述转动模组进行限位以使所述转动模组保持支撑于地面的支持状态。3.根据权利要求2所述的单侧双轮移车器,其特征在于,所述转动模组还包括轮座,所述轮座上具有限位结构,所述限位结构用于当所述转动模组处于支撑于地面的支持状态时供所述定位销卡掣以保持该支撑状态。4.根据权利要求1所述的单侧双轮移车器,其特征在于,所述转动模组还包括万向轮,所述万向轮及滚轮绕对应的所述转轴沿周向间隔分布,以使得当所述转轴转动时,先是所述滚轮摆向地面时撑起所述支撑结构,然后所述滚轮继续摆动脱离地面,由所述万向轮着地支撑所述支撑结构。5.根据权利要求4所述的单侧双轮移车器,其特征在于,所述转动模组还包括连接所述转轴的翻转杆,所述万向轮与滚轮分别与所述翻转杆固定连接。6.根据权利要求5所述的单侧双轮移车器,其特征在于,所述翻转杆与所述转轴平行间隔设置,所述翻转杆与转轴通过多个连接条连接。7.根据权利要求5所述的单侧双轮移车器,其特征在于,所述滚轮包括自所述翻转杆沿径向延伸的延伸座,所述滚轮枢接在所述延伸座上;所述万向轮包括固定在所述翻转杆的轮座、安装在所述轮座上的旋转座及枢接在旋转座上的主轮。8.根据权利要求7所述的单侧双轮移车器,其特征在于,所述滚轮的中心轴与所述延伸座的延伸方向垂直;所述主轮的中心轴与旋转座的旋转中心线垂直;所述延伸座的延伸方向与旋转座的旋转中心线所成的夹角为20-70度。9.根据权利要求1所述的单侧双轮移车器,其特征在于,所述支撑结构包括间隔设置的第一支撑块及第二支撑块,所述第一支撑块及第二支撑块均设有支撑面,所述第一支撑块的支撑面与第二支撑块的支撑面相向倾斜设置。10.根据权利要求9所述的单侧双轮移车器,其特征在于,所述第一支撑块靠近对应的所述转动模组设置,所述第二支撑块远离对应的所述转动模组设置。
技术总结
本实用新型实施例涉及执行器技术领域,公开了一种单侧双轮移车器,包括机架及分别设置于所述机架两端的两个转动模组;所述机架包括连杆本体及设于连杆本体同一侧延伸的且前后间隔的两个支撑结构,两所述支撑结构分别用于插入前后两车轮之下;所述转动模组包括枢接于所述连杆本体的一端的转轴、连接转轴的撬杠及连接该转轴且在摆向地面时撑起所述支撑结构的滚轮。本实用新型实施方式的单侧双轮移车器,通过一个机架上设置两个支撑结构,可以同时对单侧的两个轮子使用,两个单侧双轮移车器即可以升起四个轮子移走小车,减少了一半的工作量。作量。作量。
技术研发人员:赖顶天
受保护的技术使用者:达闼机器人有限公司
技术研发日:2021.11.25
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。