1.本实用新型涉及线路板收板设备技术领域,具体涉及一种化金线插框收板机构。
背景技术:
2.随着科技的发展,电子产品是日益增多,在我们生活中随处可见,而电子产品中最主要的部件之一就是线路板,线路板具有配线密度高、重量轻、厚度薄、弯折性好的特点,所以在输送和抓取的时候,需要保护好线路板的板面,以防止线路板的板面产生损伤而导致增加不必要的生产成本。
3.目前在线路板的收板设备中,其插框收板的机构在进行作业时,常因为精度不够准确,使板件在插入板框的时候发生碰撞或弯折,致使板件损坏报废,不仅增加了生产成本,还降低了工作效率。
技术实现要素:
4.本实用新型提供一种化金线插框收板机构,全自动化作业,具备高精度和高效率插框收板作业,还能自动输送板框。
5.为实现上述目的,本实用新型采用如下技术方案:
6.化金线插框收板机构,包括机架,所述机架上设置有升降机构、插框定位机构、板件夹持机构以及板框输送机构,所述插框定位机构设置在升降机构上,所述升降机构和板框输送机构并列设置在机架上,所述升降机构用于带动插框定位机构上下移动,
7.板框输送机构包括空框输入机构和满框输出机构,所述空框输入机构设置在满框输出机构上,用于将空框输入到指定的位置上并固定,所述满框输出机构设置在机架上,用于带动空框输入机构移动并将空框内的放板位置与插框定位机构相对应,且在满框时进行输出,
8.插框定位机构用于感应空框输入机构上空板框的放板位置,所述板件夹持机构设置在机架上并位于插框定位机构的上方,用于将板件通过插框定位机构插入到空框输入机构上空板框的放板位置内。
9.作为优选,所述升降机构包括升降滑轨架、升降电机、丝杆以及升降台架,所述升降滑轨架设置在机架上,所述升降电机设置在升降滑轨架上,所述丝杆设置在升降滑轨架上并与升降电机的输出端通过皮带连接,所述升降台架设置在升降滑轨架上并与丝杆连接,升降电机通过丝杆驱动升降台架沿着升降滑轨架移动。
10.作为优选,所述插框定位机构包括插框定位架、微调机构、插框导向块以及定位机构,所述插框定位架设置在升降台架上,所述微调机构设置在升降台架上并与插框定位架的一端连接,用于对插框定位架的位置进行调整,所述插框导向块对称设置在插框定位架上,所述定位机构设置在插框定位架的另一端上,用于感应插框导向块之间与空框放板位的位置并使其相互对应。
11.作为优选,所述微调机构包括微调滑轨座、微调电机、微调丝杆、微调滑块以及微
调摆杆,所述微调滑轨座设置在升降台架上,所述微调电机设置在微调滑轨座的一端,所述微调丝杆设置在微调滑轨座上并与微调电机的输出端连接,所述微调滑块设置在微调滑轨座上并与微调丝杆连接,微调摆杆一端与微调滑块连接,另一端与插框定位架连接,微调电机通过微调丝杆驱动微调滑块沿着微调滑轨座移动,同时通过微调摆杆推动插框定位架。
12.作为优选,所述定位机构包括定位滑轨座、定位气缸、定位滑动板以及定位感应器,所述定位滑轨座设置在插框定位架的一端上,所述定位滑动板设置在定位滑轨座上,所述定位感应器设置在定位滑动板上,所述定位气缸设置在定位滑轨座的一端并与定位滑动板连接,用于推动定位滑动板沿着定位滑轨座移动,使定位感应器移动至插框导向块之间。
13.作为优选,所述满框输出机构包括输出滑轨架、输出直线模组以及输出电机,所述输出滑轨架设置在机架上并与空框输入机构连接,所述输出直线模组设置在输出滑轨架上,所述输出电机设置在输出滑轨架的一端,用于驱动输出直线模组使空框输入机构沿着输出滑轨架移动。
14.作为优选,所述空框输入机构包括输入固定架、输入电机、输入传动轴、输入转动轮、输入传送带、锁框机构以及限位块,所述输入固定架设置在输出滑轨架上,所述输入电机和输入传动轴均设置在输入固定架的一端且输入电机通过皮带与输入传动轴连接,所述输入转动轮设置在输入固定架的两端并与输入传动轴连接,所述输入传送带设置在输入转动轮上,所述锁框机构设置在输入固定架的一端上,所述限位块设置在输入固定架的另一端上。
15.作为优选,所述锁框机构包括锁框气缸架、锁框气缸以及锁框件,所述锁框气缸架设置在输入固定架上,所述锁框气缸设置在锁框气缸架上,所述锁框件设置在锁框气缸上。
16.作为优选,所述板件夹持机构包括板件升降直线模组、板件升降电机、板件升降横架、板件连接杆、板件夹持气缸、板件夹持头以及板件夹持感应器,所述板件升降直线模组竖直设置在机架上,所述板件升降横架设置在板件升降直线模组上,所述板件升降电机设置在板件升降直线模组的下端,用于驱动板件升降横架沿着板件升降直线模组上下移动,所述板件连接杆设置在板件升降横架上,所述板件夹持头设置在板件夹持气缸上,所述板件夹持气缸设置在板件连接杆上,用于驱动板件夹持头的开合,所述板件夹持感应器设置在板件连接杆上,用于感应板件的位置。
17.与现有技术相比较,本实用新型具备以下有益效果:
18.(1)板框输送机构:空框输入机构通过输入电机驱动输入传送带运作,使位于输入传送带上的空框横向输送到指定的位置,满框输出机构通过输出电机驱动空框输入机构沿着输出滑轨架纵向移动,使位于空框输入机构上的空框能够纵向输送至插框定位机构的正下方,便于进行插框作业;
19.(2)插框定位机构:通过微调机构能够调整插框定位架的位置,使其与下方空框始终保持平行,避免插板时板件斜着插入引起碰撞;插框导向块能够在板件插入空框的过程中起到限制和导向板件插框位置的作用;定位机构通过定位气缸带动定位感应器,感应插框导向块之间插板位置是否与空框上的板件放置位对齐,避免板件发生碰撞或损坏,提高插框收板的精准度;
20.(3)板件夹持机构:通过板件升降电机驱动板件升降横架沿着板件直线模组上下移动,板件夹持气缸驱动板件夹持头开合夹持板件,板件夹持感应器感应板件的位置,在工
作的时候,板件夹持感应器感应到板件,而后板件夹持气缸驱使板件夹持头将板件夹住,随后板件升降电机驱动板件升降横架上下移动,实现将板件插入空框内。
附图说明
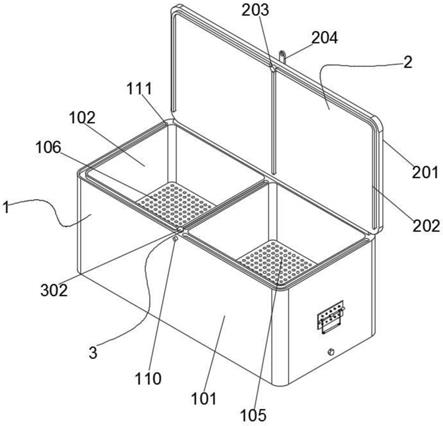
21.图1为本实用新型的立体结构示意图;
22.图2为本实用新型的升降机构结构示意图;
23.图3为本实用新型的插框定位机构结构示意图;
24.图4为本实用新型的板件夹持机构结构示意图;
25.图5为本实用新型的板框输送机构结构示意图。
具体实施方式
26.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
27.需要说明的是,当部件/零件被称为“设置在”另一个部件/零件上,它可以直接设置在另一个部件/零件上或者也可以存在居中的部件/零件。当部件/零件被称为“连接/联接”至另一个部件/零件,它可以是直接连接/联接至另一个部件/零件或者可能同时存在居中部件/零件。本文所使用的术语“连接/联接”可以包括电气和/或机械物理连接/联接。本文所使用的术语“包括/包含”指特征、步骤或部件/零件的存在,但并不排除一个或更多个其它特征、步骤或部件/零件的存在或添加。本文所使用的术语“和/或”包括一个或多个相关所列项目的任意的和所有的组合。
28.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中所使用的术语只是为了描述具体实施例的目的,而并不是旨在限制本技术。
29.请参阅图1至图5所示,一种化金线插框收板机构,包括机架1,机架上设置有升降机构2、插框定位机构3、板件夹持机构4以及板框输送机构5,插框定位机构3设置在升降机构2上,升降机构2和板框输送机构5并列设置在机架1上,升降机构2用于带动插框定位机构3上下移动,板框输送机构5包括空框输入机构51和满框输出机构52,空框输入机构51设置在满框输出机构52上,用于将空框输入到指定的位置上并固定,满框输出机构52设置在机架1上,用于带动空框输入机构51移动并将空框内的放板位置与插框定位机构3相对应,且在满框时进行输出,插框定位机构3用于感应空框输入机构51上空板框的放板位置,板件夹持机构4设置在机架1上并位于插框定位机构3的上方,用于将板件通过插框定位机构3插入到空框输入机构51上空板框的放板位置内。
30.在工作的时候,板框输送机构5的空框输入机构51将空框完全输入到满框输出机构52上,而后满框输出机构52带动空框输入机构51和空框纵向前后移动,使空框处于插框定位机构3的正下方,而升降机构2则带动插框定位机构3升降调节插框定位机构3与空框之间的距离,插框定位机构3感应空框放板的位置,随后板件夹持机构4将板件夹持并升降运动将板件通过插框定位机构3插入到空框内。
31.请参阅图2所示,升降机构2包括升降滑轨架21、升降电机21、丝杆23以及升降台架
24,升降滑轨架21设置在机架1上,升降电机22设置在升降滑轨架21上,丝杆23设置在升降滑轨架21上并与升降电机22的输出端通过皮带连接,升降台架24设置在升降滑轨架21上并与丝杆23连接,升降电机22通过丝杆23驱动升降台架24沿着升降滑轨架21移动。在工作的时候,升降电机22通过带动丝杆23使升降台架24上下移动,而插框定位机构3处于升降台架24上,所以实现插框定位机构3的上下调节目的。
32.请参阅图3所示,插框定位机构3包括插框定位架31、微调机构32、插框导向块33以及定位机构34,插框定位架31设置在升降台架24上,微调机构32设置在升降台架24上并与插框定位架31的一端连接,用于对插框定位架31的位置进行调整,插框导向块33对称设置在插框定位架31上,定位机构34设置在插框定位架31的另一端上,用于感应插框导向块33之间与空框放板位的位置并使其相互对应。在工作的时候,微调机构32对插框定位架31的位置进行微调,使其与空框以及板件夹持机构4保持平行的状态,避免插板时产生误差,而插框导向块33是对称设置的两块斜面块,其中间有用于插板的缝隙,定位机构34则可以通过插框导向块33之间的缝隙感应空框放板位,使缝隙与空框的放板位对齐,板件夹持机构4与插框导向块33的缝隙也对齐,这样在进行插板的时候,板件就能顺畅的插入指定的放板位内。
33.请参阅图3所示,微调机构32包括微调滑轨座321、微调电机322、微调丝杆323、微调滑块324以及微调摆杆325,微调滑轨座321设置在升降台架24上,微调电机322设置在微调滑轨座321的一端,微调丝杆323设置在微调滑轨座321上并与微调电机322的输出端连接,微调滑块324设置在微调滑轨座321上并与微调丝杆323连接,微调摆杆325一端与微调滑块324连接,另一端与插框定位架31连接,微调电机322通过微调丝杆323驱动微调滑块324沿着微调滑轨座321移动,同时通过微调摆杆325推动插框定位架31。在工作的时候,微调电机322通过驱动微调丝杆323使微调滑块324沿着微调滑轨座321移动,微调摆杆325连接着微调滑块324和插框定位架31,在微调滑块324移动的时候,微调摆杆325也会推动或拉动插框定位架31进行移动,实现对插框定位架31微调的目的。
34.请参阅图3所示,定位机构34包括定位滑轨座341、定位气缸342、定位滑动板343以及定位感应器344,定位滑轨座341设置在插框定位架31的一端上,定位滑动板343设置在定位滑轨座341上,定位感应器344设置在定位滑动板343上,定位气缸342设置在定位滑轨座341的一端并与定位滑动板343连接,用于推动定位滑动板343沿着定位滑轨座341移动,使定位感应器344移动至插框导向块33之间。在工作的时候,定位气缸342驱动定位滑动板343沿着定位滑轨座341移动,从而带动定位感应器344移动至插框导向块33之间的缝隙上,并透过缝隙感应空框放板位的位置,可反复定位调整,提高插板的精度,避免板件的损坏。
35.请参阅图5所示,满框输出机构52包括输出滑轨架521、输出直线模组522以及输出电机523,输出滑轨架521设置在机架1上并与空框输入机构51连接,输出直线模组522设置在输出滑轨架521上,输出电机523设置在输出滑轨架521的一端,用于驱动输出直线模组522使空框输入机构51沿着输出滑轨架521移动。在工作的时候,输出电机523通过输出直线模组522驱动空框输入机构51沿着输出滑轨架521移动,将空框输入机构51上的空框精准的输送到插框定位机构3下方,且在板件通过插框导向块33插入到空框内后,便会向内移动一个放板位的距离,配合定位感应器344使下一个放板位于插框导向块33的缝隙对齐,如此反复工作,直到板件插满板框后,便将满框输出至最外面,方便后序设备抓取。
36.请参阅图5所示,空框输入机构51包括输入固定架511、输入电机512、输入传动轴513、输入转动轮514、输入传送带515、锁框机构516以及限位块517,输入固定架511设置在输出滑轨架521上,输入电机512和输入传动轴513均设置在输入固定架511的一端且输入电机512通过皮带与输入传动轴513连接,输入转动轮514设置在输入固定架511的两端并与输入传动轴513连接,输入传送带515设置在输入转动轮514上,锁框机构516设置在输入固定架511的一端上,限位块517设置在输入固定架511的另一端上。在工作的时候,输入电机512通过输入传动轴513带动输入转动轮514,从而使输入传送带515运作将空框沿着输入传送带515的运动方向前进,直至空框与限位块517接触,随后锁框机构516将空框锁定,防止空框位移而导致插板时有误差。
37.请参阅图5所示,锁框机构516包括锁框气缸架5161、锁框气缸5162以及锁框件5163,锁框气缸架5161设置在输入固定架511上,锁框气缸5162设置在锁框气缸架5161上,锁框件5163设置在锁框气缸5162上。在工作的时候,锁框气缸5162带动锁框件5163摆动,使其将空框锁紧固定,防止空框发生位移。
38.请参阅图4所示,板件夹持机构4包括板件升降直线模组41、板件升降电机42、板件升降横架43、板件连接杆44、板件夹持气缸45、板件夹持头46以及板件夹持感应器47,板件升降直线模组41竖直设置在机架1上,板件升降横架43设置在板件升降直线模组41上,板件升降电机42设置在板件升降直线模组41的下端,用于驱动板件升降横架43沿着板件升降直线模组41上下移动,板件连接杆44设置在板件升降横架43上,板件夹持头46设置在板件夹持气缸45上,板件夹持气缸45设置在板件连接杆44上,用于驱动板件夹持头46的开合,板件夹持感应器47设置在板件连接杆44上,用于感应板件的位置。在工作的时候,板件升降电机42驱动板件升降横架43沿着板件升降直线模组41上下移动,当需要夹持机器人上的板件时以及需要输出满框时,板件升降电机42驱动板件升降横架43上升,板件夹持头46是能够随着板件升降横架43移动的,机器人将板件输送至板件夹持头46附件时,板件夹持感应器47感应到板件后,板件夹持气缸45带动板件夹持头46将板件夹持住,而后板件升降横架43上下移动,将板件夹持头46上的板件通过插框定位机构3插入到空框的放板位内,完成收板的目的。
39.本实用新型的空框输入机构51通过输入电机512驱动输入传送带515运作,使位于输入传送带515上的空框横向输送到指定的位置,满框输出机构52通过输出电机523驱动空框输入机构51沿着输出滑轨架521纵向移动,使位于空框输入机构51上的空框能够纵向输送至插框定位机构3的正下方,便于进行插框作业;通过微调机构32能够调整插框定位架31的位置,使其与下方空框始终保持平行,避免插板时板件斜着插入引起碰撞;插框导向块33能够在板件插入空框的过程中起到限制和导向板件插框位置的作用;定位机构34通过定位气缸342带动定位感应器344,感应插框导向块33之间插板位置是否与空框上的板件放置位对齐,避免板件发生碰撞或损坏,提高插框收板的精准度;通过板件升降电机42驱动板件升降横架43沿着板件直线模组41上下移动,板件夹持气缸45驱动板件夹持头46开合夹持板件,板件夹持感应器47感应板件的位置,在板件夹持感应器47感应到板件后,板件夹持气缸45驱使板件夹持头46将板件夹住,随后板件升降电机42驱动板件升降横架43上下移动,实现将板件插入空框内。
40.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不
局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。