1.本发明涉及康复治疗技术领域,尤其涉及一种老人智能辅助机器人座椅。
背景技术:
2.随着我国人口老龄化形式日趋严峻,人口老龄化问题已成为我国即将面临的一个突出的社会问题,同时,我国又是世界上人口最多的国家,由于社会、经济、文化科学的发展,计划生育工作的推进,老年人在总人口中的数量和比例不断增加。
3.老人随着年龄的增大,身体各项机能也会随之下降,行走将会变得越来越迟缓,在行走过程中,很容易摔倒,进而造成非常严重的后果,所以,为了安全起见,具有一定年龄的老人,出行时,一般都坐在座椅上,通过他人推行或者自身的驱动装置,进行行走。
4.但是,目前市场上,现有老人用的智能辅助机器人座椅,当老人腿部活动不便,坐在上面时,无法对老人腿部进行活动,腿部长时间得不到活动,更加造成了腿部活动不便的现象,容易恶性循环。
技术实现要素:
5.本发明的目的是为了解决无法对老人腿部进行活动等问题,而提出的一种老人智能辅助机器人座椅。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种老人智能辅助机器人座椅,包括箱体,固定在箱体顶部的靠椅,还包括:固定在箱体侧壁的固定轴,转动在固定轴上的第一转动板,所述第一转动板延伸出箱体且向下倾斜;还包括箱体内的驱动机构,所述驱动机构驱动第一转动板往复摆动;转动在箱体上的第二转动板,滑动在第二转动板上的滑动板,所述箱体内设有通过第一转动板往复摆动,驱动第二转动板往复摆动的传动机构;还包括转动在箱体底部的转动轮和位于箱体底部的移动轮。
8.为了驱动第一转动板往复摆动,优选的,所述驱动机构包括位于箱体内的第二电机,滑动在第一转动板延伸至箱体内一侧底部的滑动块,转动在滑动块底部的往复螺纹杆;还包括转动在箱体内的螺纹套,固定在螺纹套上的第二齿轮,固定在第二电机输出端的第一齿轮,所述第一齿轮与第二齿轮啮合连接;所述往复螺纹杆螺纹连接在螺纹套内。
9.为了驱动第二转动板往复摆动,优选的,所述传动机构包括转动在箱体内的第二转轴、过渡轴和第三转轴,连接在过渡轴和第三转轴之间的第三皮带,连接在第二转轴和过渡轴之间的第二皮带;还包括固定在第三转轴上的凸轮,所述凸轮与第二转动板底部相贴;还包括固定在第一转动板延伸至箱体内一端的圆弧齿板,固定在第二转轴上的第三齿轮,所述第三齿轮与圆弧齿板啮合连接;所述圆弧齿板的圆心与固定轴轴心共线。
10.优选的,还包括转动在箱体内的稳定轴,所述稳定轴与圆弧齿板背面相贴;连接在第一转动板延伸至箱体内一端与箱体顶部内壁的第二拉簧;固定在滑动板上的弹力带。
11.为了防止整个装置突然加速移动,优选的,还包括转动在箱体底部的第一转轴,所
述转动轮为两组设计,两组所述转动轮均固定在第一转轴上;其中,两组所述转动轮中的一组转动轮侧壁设有限位槽;还包括转动在箱体内壁的限位杆,固定在限位杆上的限位头,连接在限位杆与箱体内壁之间的第一拉簧;固定在箱体内壁的导向杆,滑动在导向杆上的限位板,所述限位板与限位杆相贴,且限制限位杆转动;箱体还设有冲击机构,当整个装置突然加速移动时,可通过冲击机构自动冲击限位板,使限位头卡在限位槽内;所述限位头与限位槽初始状态为分离状态。
12.为了使限位头卡在限位槽内,优选的,所述冲击机构包括固定在箱体内的冲击筒,滑动在冲击筒内的冲击块,固定在冲击块与冲击筒内壁之间的第二弹簧;所述冲击筒远离第二弹簧的一端开口敞开,且面向限位板;还包括固定在箱体内的空心筒,滑动在空心筒内的金属板,固定连接在金属板与空心筒顶部内壁的第三拉簧,固定在金属板底部的档杆;所述档杆向下延伸插入冲击筒内,所述档杆与冲击块侧壁相抵,所述档杆位于冲击块与限位板之间;还包括固定在箱体内的通电磁铁,当通电磁铁通电具有磁性时,所述通电磁铁与金属板相互吸合;所述箱体内还设有自动切断机构,当整个装置突然加速移动时,通过自动切断机构,自动切断通电磁铁电路,使通电磁铁失去磁性。
13.为了自动切断通电磁铁电路,优选的,所述自动切断机构包括固定在箱体内的惯性筒,所述惯性筒为水平设置;滑动在惯性筒内的惯性块,固定在惯性块与惯性筒内壁的第一弹簧;所述惯性块远离第一弹簧的一端设有第一电极片,所述惯性筒远离第一弹簧的一端内壁设有第二电极片;当第一电极片和第二电极片接触时,所述通电磁铁电路切断,所述通电磁铁失去磁性。
14.为了防止限位槽内聚集有灰尘,优选的,还包括固定在箱体内的活塞组件,滑动在箱体侧壁的滑动杆,所述滑动杆延伸出箱体的一端可与第一转动板侧壁相抵,所述滑动杆延伸至箱体的一端与活塞组件的动力端相连接;固定在滑动杆上的挡板,连接在挡板和箱体之间的第三弹簧;还包括连接在箱体内壁的喷头,连接在喷头与活塞组件之间的出气管;连接在活塞组件上的进气管,所述进气管和出气管内均设有单向阀;所述喷头喷向限位槽。
15.优选的,还包括连接在箱体内的第一电机,连接在第一电机输出端与第一转轴之间的第一皮带。
16.与现有技术相比,本发明提供了一种老人智能辅助机器人座椅,具备以下有益效果:
17.1、该老人智能辅助机器人座椅,通过第一转动板和滑动板的相互配合,可以对老人腿部进行充分活动,避免了腿部因为长时间得不到活动,造成了腿部更加活动不便的现象,促成良性循环。
18.2、该老人智能辅助机器人座椅,往复摆动的第一转动板,不但同时驱动了第二转动板的转动,同时,还通过滑动杆驱动活塞板运动,压缩气体,通过喷头喷出,将其限位槽内的灰尘吹走,防止灰尘长时间聚集在限位槽内,影响与限位头卡和,提高稳定性。
附图说明
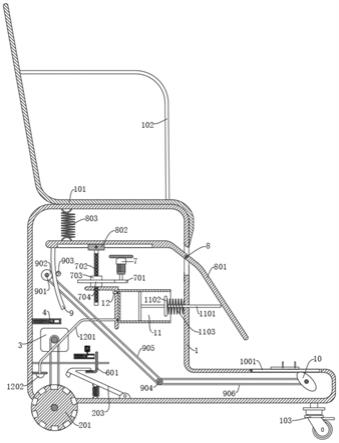
19.图1为本发明提出的一种老人智能辅助机器人座椅的结构示意图;
20.图2为本发明提出的一种老人智能辅助机器人座椅的局部结构示意图一;
21.图3为本发明提出的一种老人智能辅助机器人座椅图2中a部分的放大图;
22.图4为本发明提出的一种老人智能辅助机器人座椅图2中b部分的放大图;
23.图5为本发明提出的一种老人智能辅助机器人座椅的局部结构示意图二;
24.图6为本发明提出的一种老人智能辅助机器人座椅限位杆的结构示意图;
25.图7为本发明提出的一种老人智能辅助机器人座椅转动轮的结构示意图;
26.图8为本发明提出的一种老人智能辅助机器人座椅第一转动板的结构示意图。
27.图中:1、箱体;101、靠椅;102、扶手;103、移动轮;2、第一转轴;201、转动轮;202、限位槽;203、限位杆;204、限位头;205、第一拉簧;3、第一电机;301、第一皮带;4、惯性筒;401、惯性块;402、第一弹簧;403、第一电极片;404、第二电极片;5、冲击筒;501、冲击块;502、第二弹簧;503、空心筒;504、金属板;505、第三拉簧;506、档杆;507、通电磁铁;6、导向杆;601、限位板;7、第二电机;701、第一齿轮;702、往复螺纹杆;703、螺纹套;704、第二齿轮;8、固定轴;801、第一转动板;802、滑动块;803、第二拉簧;9、圆弧齿板;901、第二转轴;902、第三齿轮;903、稳定轴;904、过渡轴;905、第二皮带;906、第三皮带;907、第三转轴;10、凸轮;1001、第二转动板;1002、滑动板;1003、弹力带;11、活塞组件;1101、滑动杆;1102、挡板;1103、第三弹簧;12、进气管;1201、出气管;1202、喷头。
具体实施方式
28.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
29.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
30.实施例1:
31.参照图1-8,一种老人智能辅助机器人座椅,包括箱体1,固定在箱体1顶部的靠椅101,靠椅101两侧固定有扶手102,使用时,老人坐在靠椅101上,还包括:固定在箱体1侧壁的固定轴8,转动在固定轴8上的第一转动板801,第一转动板801可围绕固定轴8轴线转动,第一转动板801延伸出箱体1且向下倾斜,当老人坐在靠椅101上时,双腿放置在第一转动板801上,还包括箱体1内的驱动机构,驱动机构驱动第一转动板801往复摆动。
32.转动在箱体1上的第二转动板1001,滑动在第二转动板1001上的滑动板1002,箱体1内设有通过第一转动板801往复摆动,驱动第二转动板1001往复摆动的传动机构,当老人双腿放置在第一转动板801上时,老人的双脚放置在滑动板1002上。
33.滑动板1002为两组设计,两组滑动板1002均滑动在第二转动板1001上,第二转动板1001顶部设有凸字形滑槽,滑动板1002滑动在此滑槽内,使其滑动板1002只能沿着第二转动板1001滑动。
34.还包括转动在箱体1底部的转动轮201和位于箱体1底部的移动轮103。
35.老人坐在靠椅101上,其他人员,推着靠椅101,进行移动,通过移动轮103和转动轮201,进行移动。
36.在移动的过程中,通过驱动机构,驱动第一转动板801往复摆动,进而带动老人双腿往复摆动,活动老人膝盖等部位,同时,第一转动板801往复摆动的同时,又通过驱动机构
驱动第一转动板801往复摆动,进而带动滑动板1002上下摆动,在摆动的同时,滑动板1002同时在第二转动板1001上滑动,在滑动板1002的作用下,带动老人双脚活动,活动脚踝等部位。
37.在使用过程中,通过第一转动板801和滑动板1002的相互配合,可以对老人腿部进行充分活动,避免了腿部因为长时间得不到活动,造成了腿部更加活动不便的现象,促成良性循环。
38.实施例2:
39.参照图1-8,在实施例1的基础上,进一步的是,
40.本实施例,公开了一种驱动机构,驱动机构包括固定在箱体1内的第二电机7,滑动在第一转动板801延伸至箱体1内一侧底部的滑动块802,第一转动板801延伸至箱体1内一侧底部设有倒凸字形滑槽,滑动块802在此滑槽内滑动,在倒凸字形滑槽的限制下,滑动块802只能在此滑槽内滑动,转动在滑动块802底部的往复螺纹杆702,如图1,往复螺纹杆702相对于滑动块802,只能左右转动。
41.还包括转动在箱体1内的螺纹套703,螺纹套703限制在箱体1内,只能自转,无法移动,固定在螺纹套703上的第二齿轮704,固定在第二电机7输出端的第一齿轮701,第一齿轮701与第二齿轮704啮合连接。
42.往复螺纹杆702螺纹连接在螺纹套703内。
43.工作时,启动第二电机7,通过第一齿轮701带动第二齿轮704转动,进而带动螺纹套703转动,在螺纹套703的作用下,往复螺纹杆702上下往复移动,进而通过滑动块802带动第一转动板801上下摆动,进而带动老人腿部活动。
44.上文所说的驱动机构,也可以通过电动伸缩杆推动第一转动板801上下摆动,进行替代。
45.实施例3:
46.参照图1-8,在实施例2的基础上,进一步的是,
47.本实施例公开了一种传动机构,传动机构包括转动在箱体1内的第二转轴901、过渡轴904和第三转轴907,连接在过渡轴904和第三转轴907之间的第三皮带906,连接在第二转轴901和过渡轴904之间的第二皮带905;还包括固定在第三转轴907上的凸轮10,凸轮10与第二转动板1001底部相贴。
48.还包括固定在第一转动板801延伸至箱体1内一端的圆弧齿板9,固定在第二转轴901上的第三齿轮902,第三齿轮902与圆弧齿板9啮合连接;圆弧齿板9的圆心与固定轴8轴心共线,圆弧齿板9围绕固定轴8轴心做圆周运动。
49.第一转动板801上下摆动时,同步带动圆弧齿板9上下摆动,通过圆弧齿板9带动第三齿轮902转动,进而通过第二转轴901和第二皮带905带动过渡轴904转动,然后通过第三皮带906和第三转轴907带动凸轮10转动,在凸轮10的推动下,以及第二转动板1001自身重力的作用下,实现第二转动板1001往复摆动,进而通过滑动板1002带动老人脚踝处活动。
50.上文所说的传动机构,也可以通过电动马达,直接驱动第三转轴907转动,得以实现,进行替代。
51.还包括转动在箱体1内的稳定轴903,稳定轴903与圆弧齿板9背面相贴,圆弧齿板9卡在稳定轴903和第三齿轮902之间,使其圆弧齿板9在移动的时候,稳定性更高。
52.连接在第一转动板801延伸至箱体1内一端与箱体1顶部内壁的第二拉簧803,第二拉簧803施加作用力在第一转动板801上,使其第一转动板801在转动的过程中,更加平稳,不会出现晃动。
53.固定在滑动板1002上的弹力带1003,弹力带1003为半圆形,每个滑动板1002上有最少两个,老人的双脚可以通过弹力带1003,暂时性的固定在滑动板1002上。
54.实施例4:
55.参照图1-8,在实施例3的基础上,进一步的是,
56.还包括转动在箱体1底部的第一转轴2,转动轮201为两组设计,两组转动轮201均固定在第一转轴2上,且分别位于箱体1内壁两侧;其中,两组转动轮201中的一组转动轮201侧壁设有限位槽202,限位槽202围绕转动轮201轴线,圆周分布在转动轮201侧壁,数量为7-15个。
57.还包括转动在箱体1内壁的限位杆203,固定在限位杆203上的限位头204,连接在限位杆203与箱体1内壁之间的第一拉簧205,第一拉簧205向限位杆203施加向转动轮201转动的作用力。
58.固定在箱体1内壁的导向杆6,滑动在导向杆6上的限位板601,限位板601与限位杆203相贴,且限制限位杆203转动,如图2,限位板601底部可设有3-7组滚轮,且于限位杆203相贴,当限位板601在移动时,可减小摩擦力。
59.箱体1还设有冲击机构,当整个装置突然加速移动时,可通过冲击机构自动冲击限位板601,使限位板601与限位杆203脱离接触,使限位头204卡在限位槽202内,限制转动轮201转动。
60.限位头204与限位槽202初始状态为分离状态。
61.老人坐在靠椅101上,当受到外力影响,整个装置突然加速时,为了防止老人受伤,此时,通过冲击机构自动冲击限位板601,使限位头204卡在限位槽202内,限制转动轮201转动,进而使整个装置停止移动,有效防止老人伤到腰部或者其他部位。
62.实施例5:
63.参照图1-8,在实施例4的基础上,进一步的是,
64.本实施例公开了一种冲击机构,冲击机构包括固定在箱体1内的冲击筒5,滑动在冲击筒5内的冲击块501,固定在冲击块501与冲击筒5内壁之间的第二弹簧502,第二弹簧502承受压力,冲击筒5远离第二弹簧502的一端开口敞开,且面向限位板601。
65.还包括固定在箱体1内的空心筒503,滑动在空心筒503内的金属板504,固定连接在金属板504与空心筒503顶部内壁的第三拉簧505,第三拉簧505施加拉力,固定在金属板504底部的档杆506;档杆506向下延伸插入冲击筒5内,档杆506与冲击块501侧壁相抵,档杆506位于冲击块501与限位板601之间;还包括固定在箱体1内的通电磁铁507,当通电磁铁507通电具有磁性时,通电磁铁507与金属板504相互吸合。
66.箱体1内还设有自动切断机构,当整个装置突然加速移动时,通过自动切断机构,自动切断通电磁铁507电路,使通电磁铁507失去磁性。
67.如图4,当整个装置突然加速移动时,通过自动切断机构,使通电磁铁507失去磁性,失去磁力的通电磁铁507,失去了吸引金属板504的磁吸力,在第三拉簧505的作用下,金属板504带动档杆506向上移动,与冲击块501脱离接触,冲击块501在第二弹簧502的作用
下,快速向前移动,冲击限位板601,推动其移动,使限位板601与限位杆203脱离接触,限位头204卡在限位槽202内。
68.上文所说的冲击机构,也可以通过电动伸缩杆,推动限位板601移动,进行替代。
69.冲击块501和金属板504侧壁都固定连接有伸出轴,冲击筒5和空心筒503侧壁都设有与伸出轴对应的空心槽,伸出轴在空心槽内滑动。
70.当整个装置突然加速移动,触发后续连锁反应后,在保护完老人后,工作人员,可手动将限位杆203和限位板601恢复原样,以及手动通过伸出轴将冲击块501和金属板504恢复原样,以及其他部件,恢复原样。
71.实施例6:
72.参照图1-8,在实施例5的基础上,进一步的是,
73.本实施例,公开了一种自动切断机构,自动切断机构包括固定在箱体1内的惯性筒4,惯性筒4为水平设置,滑动在惯性筒4内的惯性块401,固定在惯性块401与惯性筒4内壁的第一弹簧402;惯性筒4的侧壁和两端,都有透气孔,确保在惯性块401移动时,惯性筒4两端的气压相同。
74.惯性块401远离第一弹簧402的一端设有第一电极片403,惯性筒4远离第一弹簧402的一端内壁设有第二电极片404;当第一电极片403和第二电极片404接触时,通电磁铁507电路切断,通电磁铁507失去磁性。
75.第一弹簧402在承受很小的作用力时,就会变形,受到拉伸,或者压缩。
76.当整个装置突然加速移动时,惯性筒4也会突然移动,在惯性的作用下,惯性块401保持不动,如图3,当整个装置突然向后移动时,也就是向左移动,此时,第二电极片404就会一并向左移动,与第一电极片403相互接触,当整个装置突然向前移动时,也就是向右移动,此时,惯性筒4向右移动,然后压缩第一弹簧402,然后在反作用力的作用下,惯性块401向右移动,使第一电极片403与第二电极片404相互接触。
77.当第一电极片403和第二电极片404接触时,通电磁铁507电路切断,通电磁铁507失去磁性。
78.实施例7:
79.参照图1-8,在实施例6的基础上,进一步的是,
80.还包括固定在箱体1内的活塞组件11,滑动在箱体1侧壁的滑动杆1101,滑动杆1101延伸出箱体1的一端可与第一转动板801侧壁相抵,滑动杆1101延伸至箱体1的一端与活塞组件11的动力端相连接。
81.活塞组件11包括活塞筒和滑动连接在活塞筒内的活塞板。
82.滑动杆1101延伸至箱体1的一端与活塞组件11的动力端相连接,指的是,滑动杆1101延伸至箱体1的一端与活塞板固定连接。
83.固定在滑动杆1101上的挡板1102,连接在挡板1102和箱体1之间的第三弹簧1103,第三弹簧1103套在滑动杆1101上,且两端分别与挡板1102和箱体1内壁固定连接。
84.还包括连接在箱体1内壁的喷头1202,连接在喷头1202与活塞组件11之间的出气管1201;连接在活塞组件11上的进气管12,进气管12和出气管1201内均设有单向阀。
85.进气管12和出气管1201均与活塞筒连通。
86.进气管12内的单向阀,使空气通过进气管12只能进入活塞筒内,无法反向流出。
87.出气管1201内的单向阀,使空气通过活塞筒只能流到出气管1201内,无法反向流入。
88.喷头1202喷向限位槽202。
89.第一转动板801在摆动的同时,推动滑动杆1101在箱体1侧壁滑动,然后推动活塞板移动,在第三弹簧1103的配合下,活塞板在活塞筒内往复移动,压缩空气,然后通过喷头1202喷出,喷向限位槽202,将其限位槽202内的灰尘吹走,防止灰尘长时间聚集在限位槽202内,影响与限位头204卡和,提高稳定性。
90.实施例8:
91.参照图1-8,在实施例7的基础上,进一步的是,
92.还包括连接在箱体1内的第一电机3,连接在第一电机3输出端与第一转轴2之间的第一皮带301。
93.在行走的过程中,除了其他人推着走之外,还可以启动第一电机3,通过第一皮带301驱动第一转轴2转动,进而驱动转动轮201转动,进行驱动行走,免去了还需要人工推着走,更加灵活。
94.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。