技术特征:
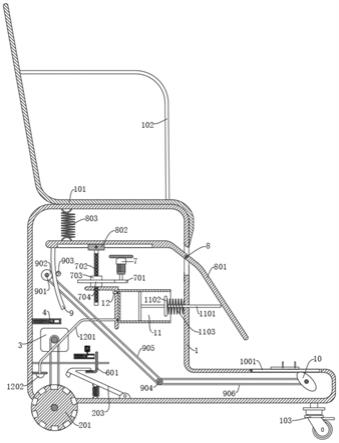
1.一种老人智能辅助机器人座椅,包括箱体(1),固定在箱体(1)顶部的靠椅(101),其特征在于,还包括:固定在箱体(1)侧壁的固定轴(8),转动在固定轴(8)上的第一转动板(801),所述第一转动板(801)延伸出箱体(1)且向下倾斜;还包括箱体(1)内的驱动机构,所述驱动机构驱动第一转动板(801)往复摆动;转动在箱体(1)上的第二转动板(1001),滑动在第二转动板(1001)上的滑动板(1002),所述箱体(1)内设有通过第一转动板(801)往复摆动,驱动第二转动板(1001)往复摆动的传动机构;还包括转动在箱体(1)底部的转动轮(201)和位于箱体(1)底部的移动轮(103)。2.根据权利要求1所述的一种老人智能辅助机器人座椅,其特征在于,所述驱动机构包括位于箱体(1)内的第二电机(7),滑动在第一转动板(801)延伸至箱体(1)内一侧底部的滑动块(802),转动在滑动块(802)底部的往复螺纹杆(702);还包括转动在箱体(1)内的螺纹套(703),固定在螺纹套(703)上的第二齿轮(704),固定在第二电机(7)输出端的第一齿轮(701),所述第一齿轮(701)与第二齿轮(704)啮合连接;所述往复螺纹杆(702)螺纹连接在螺纹套(703)内。3.根据权利要求1所述的一种老人智能辅助机器人座椅,其特征在于,所述传动机构包括转动在箱体(1)内的第二转轴(901)、过渡轴(904)和第三转轴(907),连接在过渡轴(904)和第三转轴(907)之间的第三皮带(906),连接在第二转轴(901)和过渡轴(904)之间的第二皮带(905);还包括固定在第三转轴(907)上的凸轮(10),所述凸轮(10)与第二转动板(1001)底部相贴;还包括固定在第一转动板(801)延伸至箱体(1)内一端的圆弧齿板(9),固定在第二转轴(901)上的第三齿轮(902),所述第三齿轮(902)与圆弧齿板(9)啮合连接;所述圆弧齿板(9)的圆心与固定轴(8)轴心共线。4.根据权利要求3所述的一种老人智能辅助机器人座椅,其特征在于,还包括转动在箱体(1)内的稳定轴(903),所述稳定轴(903)与圆弧齿板(9)背面相贴;连接在第一转动板(801)延伸至箱体(1)内一端与箱体(1)顶部内壁的第二拉簧(803);固定在滑动板(1002)上的弹力带(1003)。5.根据权利要求1-4所述的一种老人智能辅助机器人座椅,其特征在于,还包括转动在箱体(1)底部的第一转轴(2),所述转动轮(201)为两组设计,两组所述转动轮(201)均固定在第一转轴(2)上;其中,两组所述转动轮(201)中的一组转动轮(201)侧壁设有限位槽(202);还包括转动在箱体(1)内壁的限位杆(203),固定在限位杆(203)上的限位头(204),连接在限位杆(203)与箱体(1)内壁之间的第一拉簧(205);固定在箱体(1)内壁的导向杆(6),滑动在导向杆(6)上的限位板(601),所述限位板(601)与限位杆(203)相贴,且限制限位杆(203)转动;箱体(1)还设有冲击机构,当整个装置突然加速移动时,可通过冲击机构自动冲击限位板(601),使限位头(204)卡在限位槽(202)内;
所述限位头(204)与限位槽(202)初始状态为分离状态。6.根据权利要求5所述的一种老人智能辅助机器人座椅,其特征在于,所述冲击机构包括固定在箱体(1)内的冲击筒(5),滑动在冲击筒(5)内的冲击块(501),固定在冲击块(501)与冲击筒(5)内壁之间的第二弹簧(502);所述冲击筒(5)远离第二弹簧(502)的一端开口敞开,且面向限位板(601);还包括固定在箱体(1)内的空心筒(503),滑动在空心筒(503)内的金属板(504),固定连接在金属板(504)与空心筒(503)顶部内壁的第三拉簧(505),固定在金属板(504)底部的档杆(506);所述档杆(506)向下延伸插入冲击筒(5)内,所述档杆(506)与冲击块(501)侧壁相抵,所述档杆(506)位于冲击块(501)与限位板(601)之间;还包括固定在箱体(1)内的通电磁铁(507),当通电磁铁(507)通电具有磁性时,所述通电磁铁(507)与金属板(504)相互吸合;所述箱体(1)内还设有自动切断机构,当整个装置突然加速移动时,通过自动切断机构,自动切断通电磁铁(507)电路,使通电磁铁(507)失去磁性。7.根据权利要求6所述的一种老人智能辅助机器人座椅,其特征在于,所述自动切断机构包括固定在箱体(1)内的惯性筒(4),所述惯性筒(4)为水平设置;滑动在惯性筒(4)内的惯性块(401),固定在惯性块(401)与惯性筒(4)内壁的第一弹簧(402);所述惯性块(401)远离第一弹簧(402)的一端设有第一电极片(403),所述惯性筒(4)远离第一弹簧(402)的一端内壁设有第二电极片(404);当第一电极片(403)和第二电极片(404)接触时,所述通电磁铁(507)电路切断,所述通电磁铁(507)失去磁性。8.根据权利要求5所述的一种老人智能辅助机器人座椅,其特征在于,还包括固定在箱体(1)内的活塞组件(11),滑动在箱体(1)侧壁的滑动杆(1101),所述滑动杆(1101)延伸出箱体(1)的一端可与第一转动板(801)侧壁相抵,所述滑动杆(1101)延伸至箱体(1)的一端与活塞组件(11)的动力端相连接;固定在滑动杆(1101)上的挡板(1102),连接在挡板(1102)和箱体(1)之间的第三弹簧(1103);还包括连接在箱体(1)内壁的喷头(1202),连接在喷头(1202)与活塞组件(11)之间的出气管(1201);连接在活塞组件(11)上的进气管(12),所述进气管(12)和出气管(1201)内均设有单向阀;所述喷头(1202)喷向限位槽(202)。9.根据权利要求5所述的一种老人智能辅助机器人座椅,其特征在于,还包括连接在箱体(1)内的第一电机(3),连接在第一电机(3)输出端与第一转轴(2)之间的第一皮带(301)。
技术总结
本发明公开了一种老人智能辅助机器人座椅,属于康复治疗技术领域,一种老人智能辅助机器人座椅,包括箱体,固定在箱体顶部的靠椅,还包括:固定在箱体侧壁的固定轴,转动在固定轴上的第一转动板,所述第一转动板延伸出箱体且向下倾斜;还包括箱体内的驱动机构,所述驱动机构驱动第一转动板往复摆动;转动在箱体上的第二转动板,滑动在第二转动板上的滑动板,所述箱体内设有通过第一转动板往复摆动;通过第一转动板和滑动板的相互配合,可以对老人腿部进行充分活动,避免了腿部因为长时间得不到活动,造成了腿部更加活动不便的现象,促成良性循环。性循环。性循环。
技术研发人员:孙文成 刘小瑞
受保护的技术使用者:重庆电子工程职业学院
技术研发日:2022.02.14
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。