1.本发明涉及虚拟驾驶设备技术领域,尤其是涉及一种虚拟驾驶陀螺舱、虚拟驾驶系统及虚拟现实方法。
背景技术:
2.在信息高度发达的今天,很多课外活动,并不能引起孩子真正的兴趣,而未来的中国,将是航空大国,飞行员虽然不能象汽车驾驶员一样普遍,但会比现在多得多;未来的军事,制空权往往是决定性。所以,飞行员、飞机设计师、飞机维护维修等人才,必然大量需要,得从娃娃抓起;与飞机控制和导航相关的计算机硬件、软件、通信,也得让孩子们从小有接触的机会。
4.然而,真实的飞行不仅成本高昂,而且有危险。能让身体逼真感受爬升、俯冲、转弯、翻滚、失重等飞行体验的虚拟驾驶座舱,再配上vr虚拟现实设备形成的视频和听觉冲击,一定会激发孩子们的兴趣,甚至可以作为取得飞行执照的必要环节。
5.在虚拟驾驶领域,现有的驾驶座椅仅能实现简单的歪一歪、翻一翻,能够成科目地模拟加速、超重和失重体感的很少;目前驾驶座椅主要面向单纯的游戏和娱乐,面向中学课外活动的很少,尤其是既要模拟逼真,又要确保孩子绝对安全的产品,也未见报道;跳出游戏娱乐范畴。
技术实现要素:
6.本发明的目的在于提供一种虚拟驾驶陀螺舱、虚拟驾驶系统及虚拟现实方法,以解决现有技术中存在的上述技术问题。
7.为实现上述目的,本发明提供了以下技术方案:
8.本发明提供的一种虚拟驾驶陀螺舱,包括陀螺支架、座椅和vr装置,所述陀螺支架由外向内依次包括四层,相邻两层支架之间优选通过相互垂直的转轴连接,所述转轴优选与内层支架固定连接,与相邻的外层支架活动连接;所述转轴中的一个连接电机,另一个连接编码器;所述电机的定子、所述电机的控制器和所述编码器,优选安装在所述相邻的外层支架上;所述电机优选为永磁电机;所述座椅、所述vr装置设置在最内层的所述陀螺支架内。
9.作为本发明的进一步改进,每层所述支架均为圆环形结构或笼形结构,当所述支架为笼形结构时,优选包括竖直设置的主环、与所述主环优选呈90度夹角设置的辅环和优选水平设置的腰环。
10.作为本发明的进一步改进,还包括设置在最内层支架上的球形保护舱,所述座椅固定在所述保护舱内,所述保护舱上设置有可启闭的舱门和通气网眼。
11.作为本发明的进一步改进,所述vr装置为vr头盔,所述vr头盔上安装有外置摄像头和姿态传感器,所述保护舱内壁涂有能通过软件抠掉的颜色,优选为绿色或蓝色。
12.作为本发明的进一步改进,所述vr装置还包括实体操作装置,如飞行舵、方向盘、
油门、刹车等。
13.作为本发明的进一步改进,所述保护舱内还设置有调节平衡的配重装置以及姿态传感器。
14.作为本发明的进一步改进,所述保护舱采用不锈钢材料制成;所述陀螺支架采用铝合金材料制成。
15.作为本发明的进一步改进,所述转轴中心穿孔,由绝缘材料包裹的导电材料穿设在转轴中心孔内,所述导电材料与导线连接,并利用弹簧将所述导电材料两端压紧在所述转轴内,分别连接电源的两极。
16.本发明提供的一种虚拟现实方法,用于进行体感模拟的方法,其中,体感模拟的科目由直接包含或者间接包含的体感模拟基本动作组成;体感模拟基本动作包括短时分段水平直线加速、长时分段水平直线加速、短时分段竖直加速、转弯、俯仰、翻滚;每一个体感模拟的科目中包含有部分或全部体感模拟基本动作。
17.作为本发明的进一步改进,所述短时分段水平直线加速的方法包括如下步骤:
18.运载设备持虚拟驾驶陀螺舱准备沿直线运动,将虚拟驾驶陀螺舱置于起点,座椅面向直线前进方向;
19.运载设备带动虚拟驾驶陀螺舱进行加速,座椅产生背推感,vr装置内播放影像配合加速后移;
20.运载设备停止加速进行匀速运动,影像保持匀速直线后移;
21.将座椅水平旋转180度,背对前进方向进行匀速运动,vr装置内播放影像不转,继续保持,使用者感觉继续保持原来的匀速直线运动;
22.运载设备减速运行,带动座椅减速,产生背推感,影像配合加速,使用者感觉继续按原来的方法加速;
23.座椅减速到停止,可以接着反向加速,座椅背推感始终在,使用者感觉没有停,感觉一直在加速,速度变得更快了;
24.座椅停止加速,水平转180度,然后减速。
25.如此循环,用往复运动,配合座椅转动和影像,实现分段加速,速度越来越快的体感。
26.由于直线运动的长度有限,所以称为短时分段水平直线加速。
27.作为本发明的进一步改进,所述长时分段水平直线加速的方法包括如下步骤:
28.运载设备持虚拟驾驶陀螺舱准备沿圆周运动,座椅面向圆周切线前进方向,倾角开始为零;随着圆周速度的增加,倾角保持在离心力和重力的合力方向,让使用者感觉不到倾斜和旋转,只是感觉重了些;
29.运载设备加速,vr装置内播放的影像配合直线后移;由于圆周往复运动的路程可以远长于所述直线往复运动,所以会形成长时分段水平直线加速的模拟体验;
30.运载设备停止加速,保持匀速圆周运动,vr装置内播放的影像保持匀速直线后移;
31.将座椅水平旋转180度,背对前进方向保持匀速圆周运动,影像不转,让使用者感觉继续保持原来的匀速直线运动;
32.运载设备减速,带动座椅减速,产生背推感,影像配合加速,让人感觉继续按原来的方法加速;
33.座椅减速到停止,可以接着反向加速,座椅背推感始终在,影像保持匀速直线运动,让人感觉没有停,速度变得更快了。
34.座椅停止加速,水平转180度,然后减速。
35.如此循环,用往复圆周运动,配合座椅倾斜、座椅180度水平转动和vr 影像,实现分段加速,速度越来越快的体感。
36.作为本发明的进一步改进,所述短时分段垂直加速的方法包括如下步骤:
37.s1、运载设备持虚拟驾驶陀螺舱准备沿直线上下运动,加速上升模拟;
38.先将虚拟驾驶陀螺舱置于低位起点;
39.运载设备加速上升,带动虚拟驾驶陀螺舱进行加速上升,加速度要保证使用者有超重感,vr装置内播放的场景影像加速下移;
40.减速、停止、向下加速、匀速下降,场景下移到停止,体感是失重、恢复重力,当座舱匀速下降过程中,场景并不上移,让人感觉不到下降,而是悬停;
41.减速回到低位起点,产生超重体感,接着向上加速,超重体感继续,场景加速下降,让人感觉加速上升。
42.重复上述,让人感觉升升停停,不断上升;
43.s2、运载设备持虚拟驾驶陀螺舱准备沿直线上下运动,加速下降模拟,先将虚拟驾驶陀螺舱置于高位起点;
44.运载设备加速下降,带动虚拟驾驶陀螺舱进行加速下降,加速度要保证使用者有失重感,vr装置内播放的场景影像加速上移;
45.减速、停止、向上加速、匀速上升,场景上移到停止,体感是超重、恢复重力,向上匀速上升的过程,场景并不下移,让人感觉不到上升,而是悬停;
46.减速回到高位起点,产生失重体感,接着向下加速,失重体感继续,场景加速上升,让人感觉加速下降。
47.重复上述,让人感觉降降停停,不断下降。
48.作为本发明的进一步改进,所述转弯的方法包括如下步骤:
49.向左转弯时座椅向右倾斜,产生向右的挤靠感;向右转弯座椅向左倾斜,产生向左的挤靠感;vr装置内播放场景影像配合播放,转弯半径越小,转弯速度越快,倾斜越大,挤靠感更强。
50.作为本发明的进一步改进,所述分段爬升和分段俯冲的方法是将所述分段水平直线加速、所述分段竖直加速和所述座椅的俯仰合成。
51.本发明提供的一种虚拟驾驶系统,包括运载设备和所述虚拟驾驶陀螺舱,所述运载设备与所述虚拟驾驶陀螺舱的最外层支架连接,用于带动所述虚拟驾驶陀螺舱运动;还包括体感控制单元,所述体感控制单元内预设有用于实现虚拟现实方法的执行程序,所述体感控制单元与所述虚拟驾驶陀螺舱无线通信连接。
52.作为本发明的进一步改进,所述运载设备为机械手或塔吊。
53.本发明与现有技术相比具有如下有益效果:
54.本发明提供的虚拟驾驶陀螺舱,能够实现虚拟飞行驾驶,能使孩子们从小体验在天空飞翔的乐趣,让孩子们身在学校就能安全、真切地体验穿越上海环球金融中心的方孔、翱翔青藏高原的布达拉宫和珠穆朗玛大本营、飞越敦煌沙漠和罗布泊戈壁。
附图说明
55.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
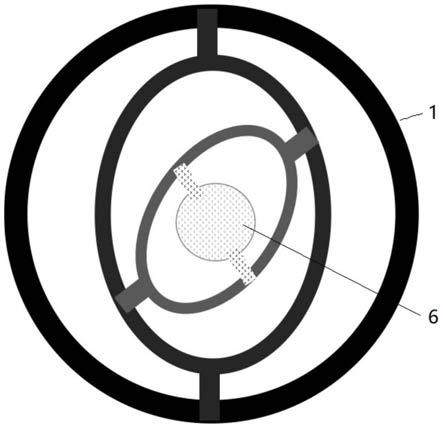
56.图1是本发明虚拟驾驶陀螺舱的结构示意图;
57.图2是本发明虚拟驾驶陀螺舱中使用者坐在座椅上时的结构示意图;
58.图3是本发明虚拟驾驶陀螺舱由机械手携带时的结构示意图;
59.图4是本发明虚拟驾驶陀螺舱由塔吊携带时的结构示意图;
60.图5是本发明虚拟驾驶陀螺舱中一种配重实施结构示意图;
61.图6是本发明虚拟驾驶陀螺舱中陀螺支架中一层支架的笼型结构示意图;
62.图7是本发明虚拟驾驶陀螺舱中电力层间传输的转轴横截面结构示意图;
63.图8是本发明虚拟驾驶陀螺舱中电力层间传输的转轴纵截面结构示意图。
64.图中1、陀螺支架;11、主环;12、辅环;13、腰环;2、座椅;3、vr装置;4、平衡调节配重块;5、塔吊;6、保护舱;7、机械手。
具体实施方式
65.为使本发明的目的、技术方案和优点更加清楚,下面将对本发明的技术方案进行详细的描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本发明所保护的范围。
66.如图1和图2所示,本发明提供了一种虚拟驾驶陀螺舱,包括陀螺支架1、座椅2和vr装置3,陀螺支架1由外向内依次包括四层,相邻两层支架之间优选通过相互垂直的转轴连接;转轴优选与内层支架固定连接,与相邻的外层支架活动连接,具体的,最外层支架通过转轴与第二层支架转动连接,第二层支架可以绕转轴转动,第二层支架通过转轴与第三层支架转动连接,第三层支架能够绕轴转动;第三层支架通过转轴与第四层支架转动连接,第四层支架能够绕轴转动;转轴中的一个连接电机,另一个连接编码器,电机的定子、电机的控制器和编码器优选安装在相邻的外层支架上,座椅、vr装置设置在最内层的陀螺支架1内,也就是安装在第四层支架上,
67.如图5所示,四层支架之间的转轴优选相互垂直;座椅2上设置有安全带、姿态传感器和平衡调节配重块5;不同的人坐进保护舱内,由于高矮胖瘦不一样,会改变系统的平衡状态。为了减少电机的附加力矩,保护舱或座椅上设置有平衡块。如图5所示,座椅的平衡质量块有两块,一块在座椅下面,可前后移动;一块在前面,可上下移动;人坐在椅子上,调整好座椅姿势,系好安全带后,自动移动平衡块调平衡。左右因为对称,一般无需调平衡。
68.安全带用于人坐在上面后绑缚;vr装置3用于人感受视频和音频信息,以及虚拟设备操作。
69.进一步的,每层支架为圆环形结构;当然,为了易于实现高强度,每层支架也可以为笼形结构;
70.如图6所示,当支架为笼形结构时,优选包括竖直设置的主环11、与主环 11呈90度
夹角设置的辅环12和水平设置的腰环13。笼形的支架,可以分段加工,铆接。
71.还包括设置在最内层支架上的球形保护舱6,座椅2固定在保护舱6内,保护舱6上设置有可启闭的舱门和通气网眼。
72.vr装置3为vr头盔,vr头盔上安装有外置摄像头和姿态传感器,保护舱 6内壁涂有能通过软件抠掉的颜色。通过设置能够抠掉的颜色,可以隐掉环境背景。vr装置与座椅姿态传感器及软件系统连接,实现舱内环境的稳定和舱外场景的及时变化。vr头盔带有外置摄像头和姿态传感器,优选带有双摄像头的头盔,向前探身可以细看仪表盘(内部虚景);低头可以看脚踏板和操纵杆(内部实体操作设备实景);侧头可看到伴飞的战友(虚拟外景),招招手;仰头可以看到倒飞的战友(虚拟外景),笑一笑。
73.具体的,保护舱6内壁颜色为绿色或蓝色,与座椅、操纵杆、人体及衣服明显不同,以便采用抠蓝或抠绿技术,将背景设置成任何场景,比如歼20,武直10,挖掘机等,仪表盘、玻璃舷窗将各具特色;特别地,透明玻璃外是动态的外景,而自己的手脚和实体操作设备也看得清清楚楚。
74.作为本发明的一种可选实施方式,保护舱6采用不锈钢材料制成,如薄钢板打孔,网眼用于通气,厚度要使强度足够,在意外撞击下可以保护舱内人员安全;陀螺支架1采用铝合金材料制成,以减轻重量,但要有足够强度,在意外撞击时有保护座舱作用。
75.如图7和图8所述,电机的转轴中心穿孔,由绝缘材料包裹的导电材料穿设在转轴中心孔内,导电材料与导线连接,并利用弹簧将导电材料两端压紧在转轴内。其中,导电材料优选为铜棒,用于将电源两极从外而内,引入内部各层支架及座舱内。电源优选为直流电源。
76.陀螺支架1上的转轴一端安装电机,另一端安装编码器;电机、编码器和电机控制器设置在同一层的支架上;电机控制器和vr装置设置有无线通信模块。
77.本发明提供的虚拟驾驶陀螺舱,能够虚拟飞行驾驶,能使孩子们从小体验在天空飞翔的乐趣,使孩子们身在学校就能安全、真切地体验,穿越上海环球金融中心的方孔、翱翔青藏高原的布达拉宫和珠穆朗玛大本营、飞越敦煌沙漠和罗布泊戈壁而这些地方。
78.本发明提供的虚拟驾驶陀螺舱,可以只有陀螺舱,没有机械臂等运载设备,这样可以降低成本,节约场地,容纳更多学员同时训练。与通常的vr座椅相比,陀螺舱的优势在于,通过抠蓝或抠绿技术,可以将虚景与操纵杆等实景结合起来,更有沉浸感和参与性。当然,这就要求vr头盔上要设置有外置摄像头,对外能够看见自身和实体操作设备,更进一步,可以定位手的空间位置,对操作虚拟按钮开关等作出反应,毕竟,飞机机舱内,可操作之处非常多,不可能都做成实体操作设备。更进一步,vr头盔上还设置有姿态传感器,对脑袋的左顾右盼、低头与仰视作出反应,及时变换vr头盔内显示器场景,可以看到上下左右前后的全景。
79.本发明提供的一种虚拟现实方法,用于进行体感模拟的方法,其中,体感模拟的科目由直接包含或者间接包含的体感模拟基本动作组成;体感模拟基本动作包括短时分段水平直线加速、长时分段水平直线加速、短时分段竖直加速,每一个体感模拟的科目中包含有部分或全部体感模拟基本动作。
80.虚拟现实方法模拟短时分段水平直线加速的方法包括如下步骤:
81.运载设备持虚拟驾驶陀螺舱准备沿直线运动,将虚拟驾驶陀螺舱置于起点,座椅
面向直线前进方向;
82.运载设备带动虚拟驾驶陀螺舱进行加速,座椅产生背推感,vr装置内播放影像配合加速后移;
83.运载设备停止加速进行匀速运动,影像保持匀速直线后移;
84.将座椅水平旋转180度,背对前进方向进行匀速运动,vr装置内播放影像不转,继续保持,使用者感觉继续保持原来的匀速直线运动;
85.运载设备减速运行,带动座椅减速,产生背推感,影像配合加速,使用者感觉继续按原来的方法加速;
86.座椅减速到停止,可以接着反向加速,座椅背推感始终在,使用者感觉没有停,感觉一直在加速,速度变得更快了;
87.座椅停止加速,水平转180度,然后减速。
88.如此循环,用往复运动,配合座椅转动和影像,实现分段加速,速度越来越快的体感。
89.由于直线运动的长度有限,所以称为短时分段水平直线加速。
90.虚拟现实方法模拟长时分段水平直线加速的方法包括如下步骤:
91.运载设备持虚拟驾驶陀螺舱准备沿圆周运动,座椅面向圆周切线前进方向,倾角开始为零;随着圆周速度的增加,倾角保持在离心力和重力的合力方向,让使用者感觉不到倾斜和旋转,只是感觉重了些;
92.运载设备加速,vr装置内播放的影像配合直线后移;由于圆周往复运动的路程可以远长于所述直线往复运动,所以会形成长时分段水平直线加速的模拟体验;
93.运载设备停止加速,保持匀速圆周运动,vr装置内播放的影像保持匀速直线后移;
94.将座椅水平旋转180度,背对前进方向保持匀速圆周运动,影像不转,让使用者感觉继续保持原来的匀速直线运动;
95.运载设备减速,带动座椅减速,产生背推感,影像配合加速,让人感觉继续按原来的方法加速;
96.座椅减速到停止,可以接着反向加速,座椅背推感始终在,影像保持匀速直线运动,让人感觉没有停,速度变得更快了。
97.座椅停止加速,水平转180度,然后减速。
98.如此循环,用往复圆周运动,配合座椅倾斜、座椅180度水平转动和vr 影像,实现分段直线加速,速度越来越快的体感。
99.虚拟现实方法模拟短时分段垂直加速的方法包括如下步骤:
100.s1、运载设备持虚拟驾驶陀螺舱准备沿直线上下运动,加速上升模拟;
101.先将虚拟驾驶陀螺舱置于低位起点;
102.运载设备加速上升,带动虚拟驾驶陀螺舱进行加速上升,加速度要保证使用者有超重感,vr装置内播放的场景影像加速下移;
103.减速、停止、向下加速、匀速下降,场景下移到停止,体感是失重、恢复重力,当座舱匀速下降过程中,场景并不上移,让人感觉不到下降,而是悬停;
104.减速回到低位起点,产生超重体感,接着向上加速,超重体感继续,场景加速下降,让人感觉加速上升。
105.重复上述,让人感觉升升停停,不断上升;
106.s2、运载设备持虚拟驾驶陀螺舱准备沿直线上下运动,加速下降模拟,先将虚拟驾驶陀螺舱置于高位起点;
107.运载设备加速下降,带动虚拟驾驶陀螺舱进行加速下降,加速度要保证使用者有失重感,vr装置内播放的场景影像加速上移;
108.减速、停止、向上加速、匀速上升,场景上移到停止,体感是超重、恢复重力,向上匀速上升的过程,场景并不下移,让人感觉不到上升,而是悬停;
109.减速回到高位起点,产生失重体感,接着向下加速,失重体感继续,场景加速上升,让人感觉加速下降。
110.重复上述,让人感觉降降停停,不断下降。
111.虚拟现实方法模拟转弯的方法包括如下步骤:
112.向左转弯时座椅向右倾斜,产生向右的挤靠感;向右转弯座椅向左倾斜,产生向左的挤靠感;vr装置内播放场景影像配合播放,转弯半径越小,转弯速度越快,倾斜越大,挤靠感更强。
113.虚拟现实方法模拟分段爬升和分段俯冲的方法是将分段水平直线加速、分段竖直加速和座椅的俯仰合成。
114.利用本发明的虚拟现实方法可以进行如下科目的飞行模拟:
115.科目1:短时分段直线加速到匀速直线运动,中间停顿时,场景在前进,但座椅实际在转头,尽量不使人感觉出来;
116.科目2:长时分段直线加速到匀速直线运动,实际并不是在直线运动,而是圆周,只是座椅与合力(重力与离心力)保持一致,细体会能感觉出好像重力的变化;中间停顿时,场景在前进,但座椅实际在转头,尽量不使人感觉出来;
117.科目3:短时分段竖直加速度上升,先超重后失重,然后停顿时,场景悬停,实际在匀速下降,尽量不使人感觉出来。减速到低位后,再加速上升,场景下降
118.科目4:短时分段竖直加速度下降,先失重后超重,然后停顿时,场景悬停,实际在匀速上升,尽量不使人感觉出来。减速到高位后,再加速下降,场景上升;
119.科目5:左转,座椅右倾;
120.科目6:右转,座椅左倾;
121.科目7:前俯,座椅前倾;
122.科目8:后仰,座椅后倾;
123.科目9:左横滚,座椅右上左下逆时针滚动;
124.科目10:右横滚,座椅左上右下顺时针滚动;
125.科目11:前纵滚,座椅向前下下翻滚;
126.科目12:后纵滚,座椅向上向后翻滚;
127.科目13:分段爬升,(科目1或科目2)加科目3再加科目8
128.科目14:分段俯冲,(科目1或科目2)加科目4再加科目7
129.科目15:颠簸模拟,运载工具多自由度叠加振动,陀螺仪支架多自由度摇摆。
130.科目16:鸡头模拟,陀螺舱第一层支架各种变化,第四层座椅姿态保持不变。
131.科目17:
……
132.在上述科目基础上,可自行设计和扩展科目,以使学生熟悉力学,会定量计算。
133.自由飞行,没有预案地随意操作,模拟不出真实体感时,红灯亮起,恢复真实体感模拟时,绿灯亮起。
134.虚拟飞行:连接虚拟场景,如同游戏。
135.实景飞行:连接远程无人机等,将真实场景引入vr头盔。
136.观摩飞行,即录播回放时,通过优化,使红灯尽量少亮起。象乘客一样,只能体验,不能操作。
137.控制飞行:系统对操作有响应,可以连接虚拟系统,也可以连接远程无人机等,操作真实的设备,vr设备中看到的,听到的,也是当时的真实场景。
[0138][0139][0141]
比赛规则:
[0142]
将目标设置在操场上空如20米,用多旋翼无人机组成一个圆环,直径大小由参赛选手选择,如10米。
[0143]
通过陀螺舱虚拟驾驶系统操作固定翼无人机,飞到某一高度,如120米,飞到距操场外某一距离,如600米,操纵无人机向操场方向飞。
[0144]
当穿越某一距离,如300米后,关闭动力,滑翔飞行,降低高度,穿越目标环。
[0145]
目标环直径越小,分数越高(命中精度);穿越时轨迹角度越陡,分数越高 (减小贯穿偏航);双机组团穿越,时间差越短,分数越高(微差爆炸)。
[0146]
上述实施例的益处是,通过这样的比赛,让学生从小铭记国耻,发愤图强;增加学生对气流和飞机相互作用的空气动力学体验,并提高滑翔技能。
[0147]
如图3和图4所示,本发明提供的一种虚拟驾驶系统,包括运载设备和虚拟驾驶陀螺舱,运载设备与虚拟驾驶陀螺舱的最外层支架连接,用于带动虚拟驾驶陀螺舱运动;还包括体感控制单元,所述体感控制单元内预设有用于实现虚拟现实方法的执行程序,所述体感控制单元与所述虚拟驾驶陀螺舱无线通信连接。所述体感控制单元,实际是一种信号转换系统,输入是远程无人机的姿态信号,或者游戏软件的外设接口信号,输出是陀螺舱、机械臂的控制信号。有些信号,比如姿态信号,会直接传递到陀螺舱,控制其翻转。有些信号,如加速度信号,由于系统的限制,很多无法模拟出来,或者无法长时间模拟,会经过转换,如所述分段加速方法,驱动机械臂和陀螺舱产生相应动作。无法模拟出时或者模拟不够逼真时,亮红灯;正常模拟时,亮绿灯。陀螺舱内,以及地面多处,设置有急停按钮,紧急情况时拍下,即通过可靠途径,切断电源,以避免危险事故发生。
[0148]
模拟驾驶体感控制单元能连接远程飞机、车、船、舰、艇设备的音像及传感器信息,用于操作或感知远程场景。
[0149]
进一步的,所述运载设备可以采用通用机械手7,如某型码垛机械手,可抓着160kg重的舱体(含人),每小时800节拍。机械手的优势是可以放在室内,更有科技感。
[0150]
机械手基座高一点,使陀螺舱最低位置略高于地面,防止舱撞地。
[0151]
机械臂设置有重力平衡结构,突然断电时可以自持,避免突然坠落。
[0152]
进一步的,运载设备也可以为塔吊5。塔吊的优势是可以放在室外,利用空中更大的空间,有更大的加速范围和更逼真的飞行体感效果。
[0153]
作为上述实施例的进一步改进,在一个实施例中,系统还包括学校的电脑机房,机房中的电脑,可以连接到特定的网站,可以进行有关知识和技能的学习及考核。通过限定访问资源,可以使电脑回归在教育教学中的正面作用,避免孩子沉浸于游戏。
[0154]
作为上述实施例的进一步改进,在一个实施例中,系统可连接到一个知识网站,包括力学等物理知识,航空知识,航天知识,地球物理,天体物理等。这样做的益处是,通过电脑辅助和学生的兴趣驱动,提高学习知识的效率。
[0155]
作为上述实施例的进一步改进,在一个实施例中,所述系统可连接到一个考核系统,可以进行背景知识考核和评级,也可以对驾驶过程数据进行记录和分析,对驾驶技术进行考核与评级。进一步,虚拟驾驶技术评级可以与考取真正飞行驾照挂勾,并形成网上社区,让学生的现实世界通过网上虚拟世界得到扩展。
[0156]
飞行虚拟驾驶系统,一个机械手携带陀螺舱在飞,很高科技,很有趣,很娱乐。这里涉及到了机器人、机械设计、运动控制、计算机编程、虚拟现实技术、5g通信、飞行器设计、空气动力学等等多种学科及其交叉,将吸引全社会各大学、科研院所、企事业单位、军队等参与和关注孩子们成长,会使孩子们从小体验在天空飞翔的乐趣,使孩子们身在学校就能安全、真切地体验,穿越上海环球金融中心的方孔、翱翔青藏高原的布达拉宫和珠穆朗玛大本营、飞越敦煌沙漠和罗布泊戈壁。
[0158]
飞行虚拟驾驶系统,一个机械手携带陀螺舱在飞,以兴趣为引导,孩子们会逐渐形成各种兴趣小组,开飞机的,修飞机的,造飞机,搞电脑的,搞编程的,学习与人相处,培养团队意识,使初中、高中与职业教育和大学教育实现无缝连接,使中国成为全世界飞行员的摇篮,助力成就中华民族的空天梦想。
[0159]
如果说过去是老师成就学生的时代,在信息化的今天,在中学特别是高中,已经是学生成就老师的时代了。各学校都在抢好的生源,想尽各种办法。以兴趣为引导,发挥孩子的个性优势,因材施教,这样的学校才是好学校。但不管怎样,学苗好对提高升学率还是有优势的。有了这套系统的学校,一定会吸引学生和家长,使学校更能招到好学生,也更能把素质化教育落到实处。
[0160]
本发明还会使旅游景点游乐场所多了一个大玩具。
[0161]
作为取得飞行驾照身边的训练器,飞行小时数自动统计,分级考核自动进行。让陀螺舱,成为未来飞行员成长的摇篮。
[0162]
本发明也可作为赛车游戏舱的升级版,带真实体感的,相信会令玩家热捧的。
[0163]
不只飞机,不只赛车,本发明还可用于船、舰、艇,以及各种大型复杂生产设备的培训。如果各学校都有此设备,就有条件对外提供社会化的服务,孩子们上课不用时,这套虚拟驾驶系统也不会闲置,设备利用率会大大提高。
[0164]
本发明还可以用于5d电影,作为个人影院新的发烧版。
[0165][0166]
这里首先需要说明的是,“向内”是朝向容置空间中央的方向,“向外”是远离容置空间中央的方向。
[0167]
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图1所示的方位
或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0168]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0169]
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
[0170]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0171]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0172]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。