1.本发明涉及边坡测绘工程领域,具体涉及一种结合北斗定位和无人机雷达的边坡断面监测预警系统。
背景技术:
2.在基础设施建设工程中,因为自然地形复杂,故常需对施工场地进行开挖或者填筑施工,施工后的边坡由于原始状态的改变,其稳定性容易受施工进展、气候季节变化等因素影响,从而产生滑坡等地质灾害,进而影响工程进度,造成人员伤亡、财务损失,因此有必要对施工边坡进行滑坡监测与预警。针对滑坡灾害的特性,对施工边坡的监测预警要有全面、实时、可提前预防等需求。
3.常见的边坡监测技术有精密大地测量法、卫星定位系统测量法、insar合成孔径雷达测量法、分布式光纤地表位移监测法等,其中lidar激光雷达扫描法是近年来新兴的一种监测方法。上述各类边坡监测技术各有优劣,其中卫星定位测量法作为一种点监测方法,其监测数据的可用性依赖监测点的选取与布置,具有实时监测、无人值守等优点;insar测量法须长时间扫描,从而获取高精度坡面数字地图,设备昂贵,且依赖人工操作;目前lidar激光雷达技术除精度较低外,具有全地形、多平台载具等优点。
4.在实际工程中单一使用上述监测方法,不能满足目标边坡的监测需求。因此,本发明针对实际边坡监测需求并结合多种监测技术的优点,提出了北斗系统与搭载激光雷达的无人机相组合的监测方案,结合人工智能神经网络算法,实现目标边坡的实时监测、坡面变形监测、坡面变形趋势分析与预测,为边坡预警、工程决策提供了客观、量化的判断依据。
技术实现要素:
5.本发明的目的在于克服现有技术存在的问题,提供一种结合北斗定位和无人机雷达的边坡断面监测预警系统。
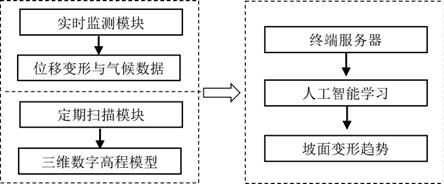
6.为实现上述技术目的,达到上述技术效果,本发明通过以下技术方案实现:一种结合北斗定位和无人机雷达的边坡断面监测预警系统,该系统包括终端服务器模块、以及无线连接所述终端服务器模块的实时监测模块和定期扫描模块,所述实时监测模块采集目标边坡的实时变形数据和气候监测数据并上传至终端服务器模块,所述定期扫描模块扫描目标边坡生成不同时段的三维数字高程模型并上传至终端服务器模块,所述终端服务器模块将不同时段的三维数字高程模型结合目标边坡的实时变形数据和气候监测数据进行人工智能学习,以获得目标边坡全断面的变形趋势及变形规律,为目标边坡的长期使用维护提供决策数据。
7.进一步的,所述实时监测模块根据采集到的目标边坡的实时变形数据和气候监测数据结合边坡理论计算判断目标边坡是否超过的变形阀值,若判断结果为是,则表明目标边坡有较大滑动趋势,生成预警信号,并将计算结果与预警信号上传至终端服务器,实施滑坡预警,若判断结果为否,则表明目标边坡处于安全状态,将目标边坡的实时变形数据和气
候监测数据上传至终端服务器。
8.进一步的,所述实时监测模块包括有固定地锚、北斗定位系统、信息储存装置、信息处理器、信息收发装置和气候监测传感器,所述固定地锚分成若干个设置在目标边坡上,所述北斗定位系统自动接收固定地锚的位移信息和气候监测传感器采集到的气候监测数据,目标边坡的实时变形数据由固定地锚的位移信息确定,北斗定位系统将实时变形数据和气候监测数据输入至信息处理器中,所述信息处理器根据边坡理论计算判断目标边坡是否超过的变形阀值,并将相应的判断结果通过信息收发装置上传至终端服务器。
9.进一步的,所述气候监测传感器包括温度计、湿度计和雨量计,气候监测数据由温度计、湿度计和雨量计测得的数据确定。
10.进一步的,所述定期扫描模块包括有无人机平台及相应的无人机、激光雷达、数字单片机、信息储存装置、信息收发装置、北斗定位系统、实时动态载波相位差分模块rtk和ins惯性飞行姿态传感器,在目标边坡附近的基准点放置固定地锚,并利用所述无人机及其机载激光雷达对目标边坡的全断面进行一定周期的拍照扫描,从第二次扫描起,每次扫描结束后,将扫描结果传输至数字单片机中,数字单片机将与前次扫描结果进行对比分析,找出目标边坡全断面中变形较大的区域,并相应的布置固定地锚,当连续多次的扫描结果无明显变化后,则可认为目标边坡到达稳定状态,无需继续进行拍照扫描工作。
11.进一步的,在按照一定周期进行拍照扫描时,所述ins惯性飞行姿态传感器连续测出无人机的当前位置,所述激光雷达测量无人机与目标边坡的距离,所述数字单片机通过无人机当前的位置以及到目标边坡上各锚点的距离,获得目标边坡的三维数字高程模型。
12.进一步的,所述数字单片机将不同周期的扫描结果通过实时动态载波相位差分模块rtk与北斗定位系统进行误差校正,生成目标边坡不同时段的三维数字高程模型,并将目标边坡不同时段的三维数字高程模型通过信息收发装置上传至终端服务器。
13.进一步的,所述实时动态载波相位差分模块rtk实时提供观测点的三维坐标与北斗定位系统中固定地锚的三维坐标信息进行误差校正。
14.进一步的,所述信息处理器和数字单片机以实时模式或异步模式将存储在信息储存装置中的对应数据通过信息收发装置上传到终端服务器;当处于实时模式时,信息处理器或数字单片机将计算结果、气候监测数据或扫描结果存储到信息存储装置中的同时通过信息收发装置上传到终端服务器;当处于异步模式时,信息处理器将计算结果与气候监测数据先存储到信息存储装置中再通过收发装置上传到终端服务器。
15.本发明的有益效果是:(1)本发明以无人机为基础,结合北斗定位系统与激光雷达设备,为滑坡预警和边坡的长期维护提供了可靠且精确的数据支撑;采用了结合实时气候数据的人工智能学习对目标边坡的整体变形趋势进行推断,在边坡开挖或者填筑施工过程中的决策提供了客观、量化的判断依据;运用了无人值守与定期监测相结合的管理方法,减少了工作人员户外作业的危险,与此同时,通过定期养护设备保证了监测结果的长期有效性;(2)采用北斗定位系统使得本发明系统具有高精度、全天候性、可靠性、无人值守、实时性的优点;(3)搭载激光雷达的无人机平台的全地形,响应快,不受地面杂波影响;(4)具有人工智能的自学习能力、高速反馈能力、逻辑推断能力;
(5)气候等数据的监测的全面性。
附图说明
16.图1为本发明实时监测模块的结构及工作流程示意图;图2为本发明定期扫描模块的结构及工作流程示意图;图3为本发明的整体结构及工作流程示意图;图4为本发明固定地锚布置示意图。
17.图中标号说明:1、基准点处的固定地锚,2、针对边坡变形区布置的固定地锚,3、正在进行扫描的无人机,4、目标边坡发生较大变形的区域。
具体实施方式
18.下面将参考附图并结合实施例,来详细说明本发明。
19.如图3所示,一种结合北斗定位和无人机雷达的边坡断面监测预警系统,该系统包括终端服务器模块、以及无线连接所述终端服务器模块的实时监测模块和定期扫描模块,所述实时监测模块采集目标边坡的实时变形数据和气候监测数据并上传至终端服务器模块,所述定期扫描模块扫描目标边坡生成不同时段的三维数字高程模型并上传至终端服务器模块,所述终端服务器模块将不同时段的三维数字高程模型结合目标边坡的实时变形数据和气候监测数据进行人工智能学习,以获得目标边坡全断面的变形趋势及变形规律,实现边坡透明化,为目标边坡的长期使用维护提供决策数据。
20.如图1所示,所述实时监测模块根据采集到的目标边坡的实时变形数据和气候监测数据结合边坡理论计算判断目标边坡是否超过的变形阀值,若判断结果为是,则表明目标边坡有较大滑动趋势,生成预警信号,并将计算结果与预警信号上传至终端服务器,实施滑坡预警,若判断结果为否,则表明目标边坡处于安全状态,将目标边坡的实时变形数据和气候监测数据上传至终端服务器。
21.所述实时监测模块包括有固定地锚、北斗定位系统、信息储存装置、信息处理器、信息收发装置和气候监测传感器,所述固定地锚分成若干个设置在目标边坡上,所述北斗定位系统自动接收固定地锚的位移信息和气候监测传感器采集到的气候监测数据,目标边坡的实时变形数据由固定地锚的位移信息确定,北斗定位系统将实时变形数据和气候监测数据输入至信息处理器中,所述信息处理器根据边坡理论计算判断目标边坡是否超过的变形阀值,并将相应的判断结果通过信息收发装置上传至终端服务器。
22.所述气候监测传感器包括温度计、湿度计和雨量计,气候监测数据由温度计、湿度计和雨量计测得的数据确定。
23.如图2所示,所述定期扫描模块包括有无人机平台及相应的无人机、激光雷达、数字单片机、信息储存装置、信息收发装置、北斗定位系统、实时动态载波相位差分模块rtk和ins惯性飞行姿态传感器,如图4所示,在目标边坡附近的基准点放置固定地锚1,并利用所述无人机3及其机载激光雷达对目标边坡的全断面进行一定周期的拍照扫描,在本实施例中,扫描周期为一周,从第二次扫描起,每次扫描结束后,将扫描结果传输至数字单片机中,数字单片机将与前次扫描结果进行对比分析,找出目标边坡全断面中变形较大的区域4,并相应的布置边坡变形区固定地锚2,当连续多次的扫描结果无明显变化后,则可认为目标边
坡到达稳定状态,无需继续进行拍照扫描工作。
24.在按照一定周期进行拍照扫描时,所述ins惯性飞行姿态传感器连续测出无人机的当前位置,所述激光雷达测量无人机与目标边坡的距离,数字单片机是一种集成电路芯片,构成了一个小而完善的计算机系统,能够进行数据处理,所述数字单片机通过无人机当前的位置以及到目标边坡上各锚点的距离,获得目标边坡的三维数字高程模型。
25.所述数字单片机将不同周期的扫描结果通过实时动态载波相位差分模块rtk与北斗定位系统进行误差校正,生成目标边坡不同时段的三维数字高程模型,并将目标边坡不同时段的三维数字高程模型通过信息收发装置上传至终端服务器。
26.所述实时动态载波相位差分模块rtk实时提供观测点的三维坐标与北斗定位系统中固定地锚的三维坐标信息进行误差校正。
27.所述信息处理器和数字单片机以实时模式或异步模式将存储在信息储存装置中的对应数据通过信息收发装置上传到终端服务器;当处于实时模式时,信息处理器或数字单片机将计算结果、气候监测数据或扫描结果存储到信息存储装置中的同时通过信息收发装置上传到终端服务器;当处于异步模式时,信息处理器将计算结果与气候监测数据先存储到信息存储装置中再通过收发装置上传到终端服务器。
28.以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
