1.本发明涉及海水污染监测技术领域,具体是一种用于海水污染的实时监测系统。
背景技术:
2.海洋污染检测是对监测人类改变海洋原来的状态,导致海洋生态系统遭到破坏的状态,有害物质进入海洋环境而造成的污染,会损害生物资源,危害人类健康,妨碍捕鱼和人类在海上的其他活动,损坏海水质量和环境质量等,词条介绍了海洋环境污染的特点及其污染的种类、海洋污染监测的分类以及海洋监测传感器,并对国内外海洋污染监测的现状及应用技术进行了综述,对海洋环境要素或指标按规定进行观测的一种工作,是控制海洋污染,保护海洋环境和资源的重要措施,其主要任务是:定期监测海洋环境中各种污染物质的浓度和其他指标;估量污染物对人体或海洋资源的某些特定成分的影响,并在污染物超过标准时发布警报等,在遥感技术中,遥感器也称传感器,自20世纪70年代初海洋遥感技术成功应用于海洋污染监测以来,遥感技术在海洋污染监测中越来越显示出它的优越性,尤其对油污染、热污染、海洋水色、浊度等监测尤为突出,目前,国外应用海洋卫星遥感技术已能对全球沿海污染进行监测。
3.在中国专利一种海水污染动态监测系统(专利号为:cn207147997u)中,该装置在实际测试过程中,表现良好,结构稳定可靠,完全能够实现随船实时检测海水水质,且具有测试纸颜色识别、测试次数增加和远程监测的功能,适合推广运用,但是,该装置设置在海洋中进行检测,容易遭受海洋恶劣自然环境影响,导致装置容易受到破坏,影响使用效果和监测数据的精确性,且可控性较差,操作不方便,检测范围小,检测数据不够全面。因此,本领域技术人员提供了一种用于海水污染的实时监测系统,以解决上述背景技术中提出的问题。
技术实现要素:
4.本发明的目的在于提供一种用于海水污染的实时监测系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:一种用于海水污染的实时监测系统,包括无人机体和用于海水污染监测的遥感器本体,所述无人机体的底部四个边角处均固定连接有安装架,且四个安装架的下端固定连接有安装板,所述安装板的上侧分别固定连接有通讯模块、蓄电池组和plc控制器,且安装板的下侧固定连接有遥控信号器,所述安装板的下侧固定连接有机箱,且机箱中设有旋转调节机构,所述旋转调节机构的一端贯穿机箱的下侧向外延伸并固定连接有凹形架壳,且凹形架壳中设有双杆角度调节机构,所述双杆角度调节机构的两端分别贯穿凹形架壳相对的两侧并与遥感器本体的两侧固定连接,所述遥感器本体、通讯模块、蓄电池组、遥控信号器、旋转调节机构和双杆角度调节机构分别与plc控制器电性连接;所述旋转调节机构包括固定在机箱一侧的伺服电机,所述伺服电机的驱动端固定
连接有横向设置的第一驱动轴,且第一驱动轴的一端贯穿延伸至机箱中并固定连接有主动锥齿轮,所述机箱的上端内壁通过第一轴承座转动连接有竖直设置的旋转轴,且旋转轴上固定连接有与主动锥齿轮啮合连接的从动锥齿轮,所述旋转轴的一端贯穿机箱并与凹形架壳固定连接。
6.作为本发明更进一步的方案:所述双杆角度调节机构包括固定在凹形架壳前侧中心处的步进电机,所述步进电机的驱动端固定连接有第二驱动轴,且第二驱动轴的一端贯穿延伸至凹形架壳中并固定连接有第一锥齿轮,所述凹形架壳的横直端中通过两个轴承套转动连接有两个横向设置的第一转杆,且两个第一转杆分别位于第一锥齿轮的两侧对称设置,两个所述第一转杆相近的一端均固定连接有第二锥齿轮,且第一锥齿轮分别与两个第二锥齿轮啮合连接,两个所述第一转杆相远的一端均固定连接有第三锥齿轮,所述凹形架壳的两个竖直端内壁均通过第二轴承座转动连接有竖直设置的蜗杆,且蜗杆的上端固定连接有第二转杆,所述第二转杆的上端固定连接有第四锥齿轮,且第三锥齿轮与第四锥齿轮啮合连接,所述凹形架壳相对的两侧侧壁均插设并转动连接有转销,且转销的一端固定连接有与蜗杆啮合连接的蜗轮,所述转销的一端与遥感器本体固定连接。
7.作为本发明更进一步的方案:所述凹形架壳相对的两侧均开设有开孔,且两个转销分别贯穿两个开孔设置,所述开孔的内壁通过轴承件与转销的外侧壁转动连接。
8.作为本发明更进一步的方案:所述第一转杆的两端与第二锥齿轮、第三锥齿轮之间均采用焊接的方式固定连接。
9.作为本发明更进一步的方案:所述凹形架壳的两侧下部固定连接有两个对称设置的l形杆,且两个l形杆的下端延伸至遥感器本体的下方均固定连接有落地板。
10.作为本发明更进一步的方案:所述旋转轴的外侧壁与从动锥齿轮的贯穿孔内壁采用焊接的方式固定连接。
11.作为本发明更进一步的方案:所述无人机体、安装架、安装板和机箱每相邻两者之间均采用焊接的方式固定连接。
12.作为本发明更进一步的方案:所述无人机体的上侧固定连接有光伏发电模组,且光伏发电模组的一端与蓄电池组电性连接。
13.与现有技术相比,本发明的有益效果是:1、通过设置无人机体可实现本装置的飞行监测,安全性更高,光伏发电模组给蓄电池组进行充电为给用电部件提供电力输出,遥控信号器接收远程操控信号,遥感器本体对海水进行遥感监测,将数据由通讯模块传输至监测中心进行实时监控,操控方便,数据监控更精确。
14.2、通过设置旋转调节机构和双杆角度调节机构,启动伺服电机工作,带动第一驱动轴转动,进而带动主动锥齿轮转动,由于主动锥齿轮与从动锥齿轮啮合,进而带动旋转轴转动,从而带动遥感器本体水平旋转,然后,启动步进电机工作,带动第二驱动轴转动,进而带动第一锥齿轮转动,由于第一锥齿轮分别与两个第二锥齿轮啮合,进而带动两个第一转杆同步转动,进而带动两个第三锥齿轮转动,由于第三锥齿轮与第四锥齿轮啮合,进而带动两个第二转杆同时转动,实现两个蜗杆旋转,由于蜗杆与蜗轮啮合,进而带动两个转销同步转动,从而带动遥感器本体轴向角度旋转,实现遥感器本体的多角度定位调节,使监控无死角,使用更方便,监控范围更广。
附图说明
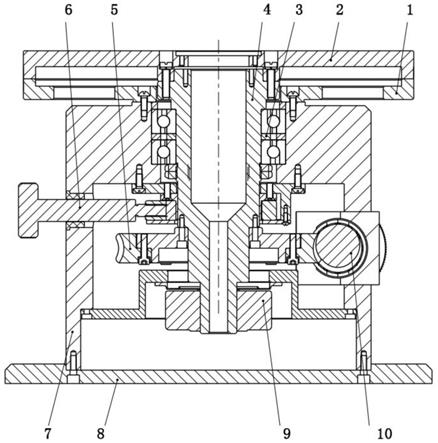
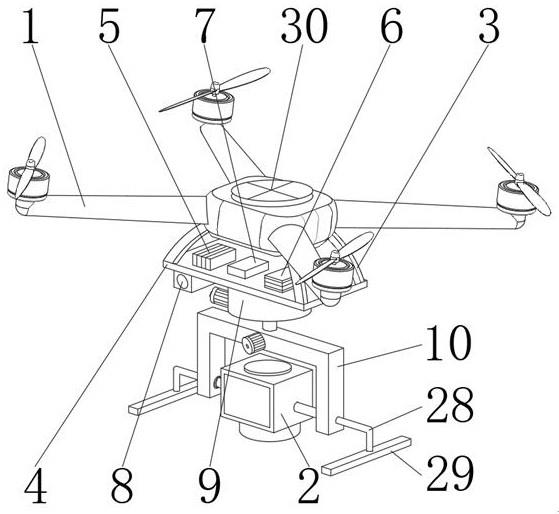
15.图1为一种用于海水污染的实时监测系统的立体结构示意图;图2为一种用于海水污染的实时监测系统中机箱和凹形架壳处的立体结构示意图;图3为一种用于海水污染的实时监测系统中机箱和凹形架壳处的正视剖面结构示意图;图4为一种用于海水污染的实时监测系统中图3的a处放大结构示意图;图5为一种用于海水污染的实时监测系统中图3的b处放大结构示意图。
16.图中:1、无人机体;2、遥感器本体;3、安装架;4、安装板;5、通讯模块;6、蓄电池组;7、plc控制器;8、遥控信号器;9、机箱;10、凹形架壳;11、伺服电机;12、第一驱动轴;13、主动锥齿轮;14、旋转轴;15、从动锥齿轮;16、步进电机;17、第二驱动轴;18、第一锥齿轮;19、轴承套;20、第一转杆;21、第二锥齿轮;22、第三锥齿轮;23、蜗杆;24、第二转杆;25、第四锥齿轮;26、转销;27、蜗轮;28、l形杆;29、落地板;30、光伏发电模组。
具体实施方式
17.请参阅图1~5,本发明实施例中,一种用于海水污染的实时监测系统,包括无人机体1和用于海水污染监测的遥感器本体2,无人机体1的底部四个边角处均固定连接有安装架3,且四个安装架3的下端固定连接有安装板4,安装板4的上侧分别固定连接有通讯模块5、蓄电池组6和plc控制器7,且安装板4的下侧固定连接有遥控信号器8,安装板4的下侧固定连接有机箱9,且机箱9中设有旋转调节机构,旋转调节机构的一端贯穿机箱9的下侧向外延伸并固定连接有凹形架壳10,且凹形架壳10中设有双杆角度调节机构,双杆角度调节机构的两端分别贯穿凹形架壳10相对的两侧并与遥感器本体2的两侧固定连接,遥感器本体2、通讯模块5、蓄电池组6、遥控信号器8、旋转调节机构和双杆角度调节机构分别与plc控制器7电性连接,无人机体1可实现本装置的飞行监测,安全性更高,光伏发电模组30给蓄电池组6进行充电为给用电部件提供电力输出,遥控信号器8接收远程操控信号,遥感器本体2对海水进行遥感监测,将数据由通讯模块5传输至监测中心进行实时监控,操控方便,数据监控更精确;旋转调节机构包括固定在机箱9一侧的伺服电机11,伺服电机11的驱动端固定连接有横向设置的第一驱动轴12,且第一驱动轴12的一端贯穿延伸至机箱9中并固定连接有主动锥齿轮13,机箱9的上端内壁通过第一轴承座转动连接有竖直设置的旋转轴14,且旋转轴14上固定连接有与主动锥齿轮13啮合连接的从动锥齿轮15,旋转轴14的一端贯穿机箱9并与凹形架壳10固定连接,启动伺服电机11工作,带动第一驱动轴12转动,进而带动主动锥齿轮13转动,由于主动锥齿轮13与从动锥齿轮15啮合,进而带动旋转轴14转动,从而带动遥感器本体2水平旋转;如图2~5所示:双杆角度调节机构包括固定在凹形架壳10前侧中心处的步进电机16,步进电机16的驱动端固定连接有第二驱动轴17,且第二驱动轴17的一端贯穿延伸至凹形架壳10中并固定连接有第一锥齿轮18,凹形架壳10的横直端中通过两个轴承套19转动连接有两个横向设置的第一转杆20,且两个第一转杆20分别位于第一锥齿轮18的两侧对称设置,两个第一转杆20相近的一端均固定连接有第二锥齿轮21,且第一锥齿轮18分别与两个
第二锥齿轮21啮合连接,两个第一转杆20相远的一端均固定连接有第三锥齿轮22,凹形架壳10的两个竖直端内壁均通过第二轴承座转动连接有竖直设置的蜗杆23,且蜗杆23的上端固定连接有第二转杆24,第二转杆24的上端固定连接有第四锥齿轮25,且第三锥齿轮22与第四锥齿轮25啮合连接,凹形架壳10相对的两侧侧壁均插设并转动连接有转销26,且转销26的一端固定连接有与蜗杆23啮合连接的蜗轮27,转销26的一端与遥感器本体2固定连接,启动步进电机16工作,带动第二驱动轴17转动,进而带动第一锥齿轮18转动,由于第一锥齿轮18分别与两个第二锥齿轮21啮合,进而带动两个第一转杆20同步转动,进而带动两个第三锥齿轮22转动,由于第三锥齿轮22与第四锥齿轮25啮合,进而带动两个第二转杆24同时转动,实现两个蜗杆23旋转,由于蜗杆23与蜗轮27啮合,进而带动两个转销26同步转动,从而带动遥感器本体2轴向角度旋转;如图5所示:凹形架壳10相对的两侧均开设有开孔,且两个转销26分别贯穿两个开孔设置,开孔的内壁通过轴承件与转销26的外侧壁转动连接,便于转销26转动;如图4和图5所示:第一转杆20的两端与第二锥齿轮21、第三锥齿轮22之间均采用焊接的方式固定连接,连接牢靠;如图1所示:凹形架壳10的两侧下部固定连接有两个对称设置的l形杆28,且两个l形杆28的下端延伸至遥感器本体2的下方均固定连接有落地板29,落地稳定;如图3所示:旋转轴14的外侧壁与从动锥齿轮15的贯穿孔内壁采用焊接的方式固定连接,连接牢靠;如图1所示:无人机体1、安装架3、安装板4和机箱9每相邻两者之间均采用焊接的方式固定连接,连接牢靠;如图1所示:无人机体1的上侧固定连接有光伏发电模组30,且光伏发电模组30的一端与蓄电池组6电性连接,提高电力续航性。
18.本发明的工作原理是:使用本装置对海水污染进行实时监测时,无人机体1可实现本装置的飞行监测,安全性更高,光伏发电模组30给蓄电池组6进行充电为给用电部件提供电力输出,遥控信号器8接收远程操控信号,遥感器本体2对海水进行遥感监测,将数据由通讯模块5传输至监测中心进行实时监控,操控方便,数据监控更精确;监控时,启动伺服电机11工作,带动第一驱动轴12转动,进而带动主动锥齿轮13转动,由于主动锥齿轮13与从动锥齿轮15啮合,进而带动旋转轴14转动,从而带动遥感器本体2水平旋转,然后,启动步进电机16工作,带动第二驱动轴17转动,进而带动第一锥齿轮18转动,由于第一锥齿轮18分别与两个第二锥齿轮21啮合,进而带动两个第一转杆20同步转动,进而带动两个第三锥齿轮22转动,由于第三锥齿轮22与第四锥齿轮25啮合,进而带动两个第二转杆24同时转动,实现两个蜗杆23旋转,由于蜗杆23与蜗轮27啮合,进而带动两个转销26同步转动,从而带动遥感器本体2轴向角度旋转,实现遥感器本体2的多角度定位调节,使监控无死角,使用更方便,监控范围更广。
19.以上所述的,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。