1.本技术属于飞机整机强度试验技术领域,具体涉及一种用于飞机强度试验的飞机结构表面巡检系统及方法。
背景技术:
2.飞机疲劳试验过程中,损伤和缺陷能否及时发现和确认对新型号飞机试飞、服役的飞行安全至关重要。一般在试验中,需要对飞机内舱表面容易出现表面形变、表面裂纹的部位以及螺栓连接的部位进行状态监测,同时为保证试验安全,还需监测作动器安装螺丝是否松动或脱落、钢丝绳是否断裂(断丝)、连接处的状态等各种常见缺陷。
3.现阶段飞机强度试验中,飞机结构表面巡检已尝试使用机器视觉代替人工实现自动化巡检,一定程度上提高了巡检效率。但由于疲劳试验周期中飞机结构根据当前状态及受载大小会发生变形,为保证获得试验件关键部位全状态的监测,机器视觉损伤检测是一个伴随飞机整个飞行历程的动态巡检,巡检要求检测区域的定位及巡检结果可视化标记方面要求具有很高精度。
4.因此,需要研发一种新的飞机强度试验内舱轨道式巡检系统定位及标记技术,以提升飞机全机疲劳强度试验中结构损伤巡检效率和质量。
技术实现要素:
5.为了解决现有技术中存在的至少一个技术问题,本技术提供了一种用于飞机强度试验的飞机结构表面巡检系统及方法。
6.第一方面,本技术公开了一种用于飞机强度试验的飞机结构表面巡检系统,包括:
7.多个二维码标签,所述多个二维码标签分别设置在试验机表面的对应检测区域内,其中,每个所述二维码标签的识别信息中至少包含其所处检测区域的位置信息;
8.轨道巡检系统,其具有轨道以及能够在所述轨道上移动的滑行机构,其中,所述轨道铺设成能够使得所述滑行机构按照预定路径依次经过所述检测区域;
9.mec服务器,用于存储试验巡检任务信息以及巡检结果信息;
10.控制端,用于控制所述mec服务器将其存储的试验巡检任务信息对外发出;
11.视觉识别模组,其设置在所述轨道巡检系统的滑行机构上,其中,所述视觉识别模组配置成:
12.用于接收所述mec服务器传输的试验巡检任务信息;以及
13.用于响应所述试验巡检任务信息的巡检要求,控制所述滑行机构在轨道上的移动路径;以及
14.用于响应所述试验巡检任务信息的巡检要求,对沿途的符合巡检要求的检测区域内的二维码标签进行扫描,以获取对应检测区域的位置信息,同时,对对应检测区域进行高清二维图像的拍摄和3d图像的扫描;以及
15.用于将拍摄的图像信息与时间以及对应的位置信息进行叠加,并将叠加后的信息
作为巡检结果信息传输至所述mec服务器。
16.根据本技术的至少一个实施方式,所述视觉识别模组包括监控云台相机、2d高清相机、3d相机、第一通信模块以及处理模块,其中,所述处理模块用于:
17.通过所述第一通信模块将接收所述mec服务器传输的试验巡检任务信息;以及
18.根据所述试验巡检任务信息中的巡检要求,控制所述滑行机构在轨道上的移动路径;以及
19.根据所述巡检要求,控制所述监控云台相机对沿途的符合巡检要求的检测区域内的二维码标签进行扫描,以获取对应检测区域的位置信息,同时,还分别控制所述2d高清相机和3d相机对对应检测区域进行高清二维图像的拍摄和3d图像的扫描;以及
20.将拍摄和扫描的图像信息与时间以及对应的位置信息进行叠加,并通过所述第一通信模块将叠加后的信息作为巡检结果信息传输至所述mec服务器。
21.根据本技术的至少一个实施方式,所述处理模块还用于:
22.将拍摄和扫描的高清二维图像和3d图像进行压缩处理,之后再与时间以及对应的位置信息进行叠加。
23.根据本技术的至少一个实施方式,所述控制端还用于:
24.创建临时巡检任务信息,并将所述临时巡检任务信息传输至所述mec服务器后再发送至所述视觉识别模组;以及
25.从所述mec服务器中调取巡检结果信息并进行分析;
26.相应的,所述视觉识别模组能够根据所述临时巡检任务信息的巡检要求进行对应的操作。
27.根据本技术的至少一个实施方式,所述控制端包括控制模块和第二通信模块,其中,所述控制模块用于:
28.创建所述临时巡检任务信息,并将所述临时巡检任务信息通过所述第二通信模块传输至所述mec服务器,随后再控制所述mec服务器将临时巡检任务信息发送至所述视觉识别模组;以及
29.通过所述第二通信模块从所述mec服务器中调取巡检结果信息并进行分析。
30.根据本技术的至少一个实施方式,所述第一通信模块和所述第二通信模块均为5g无线通信模块。
31.第二方面,本技术还公开了一种用于飞机强度试验的飞机结构表面巡检方法,包括如下步骤:
32.步骤一、控制端控制mec服务器将其存储的试验巡检任务信息或临时巡检任务信息对外发送至视觉识别模组;
33.步骤二、所述视觉识别模组根据所述试验巡检任务信息或临时巡检任务信息中的巡检要求,控制所述滑行机构在轨道上的移动路径;
34.步骤三、根据所述巡检要求,对沿途的符合巡检要求的检测区域内的二维码标签进行扫描,以获取对应检测区域的位置信息,同时,对对应检测区域进行高清二维图像的拍摄和3d图像的扫描;
35.步骤四、将拍摄和扫描的图像信息与时间以及对应的位置信息进行叠加,并将叠加后的信息作为巡检结果信息传输至所述mec服务器。
36.根据本技术的至少一个实施方式,所述步骤一中,在控制端控制mec服务器将其存储的试验巡检任务信息或临时巡检任务信息对外发送至视觉识别模组之前,还包括:
37.通控制端创建临时巡检任务信息,并将所述临时巡检任务信息传输至所述mec服务器。
38.根据本技术的至少一个实施方式,所述的飞机结构表面巡检方法还包括:
39.步骤五、通过所述控制端从所述mec服务器中调取巡检结果信息并进行分析。
40.本技术至少存在以下有益技术效果:
41.本技术的用于飞机强度试验的飞机结构表面巡检系统及方法,同时具备将巡检结果与巡检位置融合存储便于检索和检查,实现飞机全机强度试验中试验结构损伤的快速定位和直观显示,可有效地提高巡检的效率和质量,确保试验顺利运行,并且可以进一步推动巡检记录的数字化;
42.另外,本技术的用于飞机强度试验的飞机结构表面巡检系统及方法,可有效确保巡检系统的视觉模组采集的损伤检测图像具有直观的位置和时间信息,便于结构损伤的快速定位。
附图说明
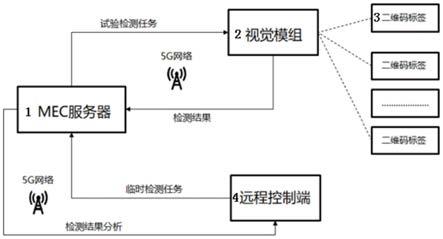
43.图1是本技术的用于飞机强度试验的飞机结构表面巡检系统的结构示意图;
44.图2是本技术的用于飞机强度试验的飞机结构表面巡检方法的流程图。
具体实施方式
45.为使本技术实施的目的、技术方案和优点更加清楚,下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施例是本技术一部分实施例,而不是全部的实施例。下面通过参考附图描述的实施例是示例性的,旨在用于解释本技术,而不能理解为对本技术的限制。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
46.第一方面,如图1所示,本技术公开了一种用于飞机强度试验的飞机结构表面巡检系统,包括二维码标签3、轨道巡检系统、mec服务器1、控制端4(即图1中的远程控制端)、视觉识别模组2。
47.具体的,二维码标签3的数量为多个,具体数量可根据检测区域的数量而定,多个二维码标签3分别设置在试验机表面的对应检测区域内,其中,每个二维码标签3的大小可以根据需要进行选择,本实施例中,大小尺寸为1cm
×
1cm,另外,每个二维码标签3的识别信息中至少包含其所处检测区域的位置信息,例如如12框16长桁。
48.轨道巡检系统具有轨道以及能够在轨道上移动的滑行机构,其中,轨道铺设成能够使得滑行机构按照预定路径依次经过检测区域,通常是使得轨道能够路经所有的检测区域,而预定路径主要是根据试验巡检任务信息中的巡检要求(包括巡检点位)来定。举例来说,检测区域有4个,分别为巡检点1、2、3、4,轨道铺设成能够路经该4个检测区域,而此时巡检要求中只要求对巡检点2、4进行巡检,对应的,预定路径就是要求滑行机构能够分别路经巡检点2、4,以备后续操作。
49.mec服务器1能够布置巡检系统和数据库,并用于存储试验巡检任务信息(即图1中的试验检测任务)以及巡检结果信息,另外,mec服务器1中还具有能够对外传输信息和接收外部信息的通信模块,进一步,mec服务器1还可以可对其内部累积的大量的结构化存储的损伤检测数据进行大数据分析进而得到试验机结构损伤出现的各种规律,为提高试验安全运行水平和管理自动化水平提供了有效的手段;其中,巡检结果可以包括检测图片、检测位置、检测时间等,其格式包括文字、图片、视频及动画,检测图片与检测位置、检测时间数据结构化存储并融合显示。
50.控制端4用于向mec服务器1传输控制指令,从而使得mec服务器1将其事先存储的试验巡检任务信息对外发出(发送至视觉识别模组2)。
51.视觉识别模组2设置在轨道巡检系统的滑行机构上,其中,视觉识别模组2配置成:
52.用于接收mec服务器1传输的试验巡检任务信息;以及用于响应试验巡检任务信息的巡检要求,控制滑行机构在轨道上的移动路径;以及用于响应试验巡检任务信息的巡检要求,对沿途的符合巡检要求的检测区域内的二维码标签3进行扫描,以获取对应检测区域的位置信息,同时,对对应检测区域进行高清二维图像的拍摄和3d图像的扫描;以及用于将拍摄的图像信息与时间以及对应的位置信息进行叠加,并将叠加后的信息作为巡检结果信息传输至所述mec服务器1。
53.需要说明的是,视觉识别模组2可以包括多种适合的结构组件,本实施例中,优选视觉识别模组2包括监控云台相机(例如200万像素红外半球型摄像机)、2d高清相机(例如2000万像素黑白工业相机)、3d相机(例如结构光工业3d相机)、第一通信模块以及处理模块。
54.其中,处理模块用于:
55.通过第一通信模块将接收mec服务器1传输的试验巡检任务信息;以及根据试验巡检任务信息中的巡检要求,控制滑行机构在轨道上的移动路径;以及根据巡检要求,控制监控云台相机对沿途的符合巡检要求的检测区域内的二维码标签3进行扫描,以获取对应检测区域的位置信息,同时,还分别控制2d高清相机和3d相机对对应检测区域进行高清二维图像的拍摄和3d图像的扫描;以及将拍摄和扫描的图像信息与时间以及对应的位置信息进行叠加,并通过第一通信模块将叠加后的信息作为巡检结果信息传输至所述mec服务器1。
56.进一步的,在其他优选实施例中,处理模块还用于:
57.将拍摄和扫描的高清二维图像和3d图像进行压缩处理,之后再与时间以及对应的位置信息进行叠加。
58.进一步的,本技术飞机结构表面巡检系统中,mec服务器1除了包括事先存储的试验巡检任务信息,还可以根据需要存储临时巡检任务信息(即图1中的临时检测任务),对应的,该临时巡检任务信息可以由控制端4创建。
59.即控制端4还可以用于:
60.创建临时巡检任务信息,并将临时巡检任务信息传输至mec服务器1后再发送至视觉识别模组2;以及从mec服务器1中调取巡检结果信息进行分析;此时,上述视觉识别模组2能够根据临时巡检任务信息的巡检要求进行对应的操作(即与试验巡检任务信息相同的操作步骤)。
61.相应的,控制端4可以包括移动终端(移动设备、pc、平板)、服务器等,用于远程显
示巡检画面,其中,对应的移动终端中又可以包括控制模块和第二通信模块。
62.具体的,该控制模块用于:
63.创建临时巡检任务信息,并将临时巡检任务信息通过第二通信模块传输至mec服务器1,随后再通过第二通信向mec服务器1发送控制指令,控制mec服务器1将临时巡检任务信息发送至视觉识别模组2;以及通过第二通信模块从mec服务器1中调取巡检结果信息并进行分析,使得远程人员可以随时随地使用移动设备、pc、平板等设备从mec服务器1中获取巡检信息。
64.进一步的,本技术的上述各种设备间的通讯可以根据需要进行适合的选择,本实施例中,是采用视觉模组加二维码标签的方式识别和标记当前位置,再结合5g网络大带宽、低延时、高速度等的特点,实现定位及标记信息的高精度实时融合。因此,优选mec服务器1中的通信模块、第一通信模块以及第二通信模块均为5g无线通信模块。
65.第二方面,如图2所示,本技术还公开了一种用于飞机强度试验的飞机结构表面巡检方法,其采用上述第一方面中任一项所述的飞机结构表面巡检系统,具体包括如下步骤:
66.步骤一、控制端4控制mec服务器1将其存储的试验巡检任务信息或临时巡检任务信息对外发送至视觉识别模组2。
67.当然,在该步骤之前,还可以包括例如设备在连接、检查等准备巡检步骤。
68.并且,在其他实施例中,在该步骤一中,在控制端4控制mec服务器1将其存储的试验巡检任务信息或临时巡检任务信息对外发送至视觉识别模组2之前,还包括:
69.通过控制端4创建临时巡检任务信息,并将临时巡检任务信息传输至mec服务器1。
70.步骤二、视觉识别模组2根据试验巡检任务信息或临时巡检任务信息中的巡检要求,控制滑行机构在轨道上的移动路径。
71.步骤三、根据巡检要求,对沿途的符合巡检要求的检测区域内的二维码标签3进行扫描,以获取对应检测区域的位置信息,同时,对对应检测区域进行高清二维图像的拍摄和3d图像的扫描。
72.步骤四、将拍摄和扫描的图像信息与时间以及对应的位置信息进行叠加,并将叠加后的信息作为巡检结果信息传输至mec服务器1。
73.最后,完成所有巡检任务后,试验巡检人员发出结束指令,mec服务器端将此次巡检结果整理保存,包括巡检图像、巡检时间、巡检路线等,通过巡检数据对巡检质量进行评估,并建立索引方便后期查询。
74.因此,在本技术的飞机结构表面巡检方法中,还可以包括:
75.步骤五、通过控制端4从mec服务器1中调取巡检结果信息并进行分析(相当于对巡检质量进行评估,并建立索引方便后期查询)。
76.综上所述,本技术的用于飞机强度试验的飞机结构表面巡检系统及方法,同时具备将巡检结果与巡检位置融合存储便于检索和检查,实现飞机全机强度试验中试验结构损伤的快速定位和直观显示,可有效地提高巡检的效率和质量,确保试验顺利运行,并且可以进一步推动巡检记录的数字化;另外,本技术的用于飞机强度试验的飞机结构表面巡检系统及方法,可有效确保巡检系统的视觉模组采集的损伤检测图像具有直观的位置和时间信息,便于结构损伤的快速定位。
77.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何
熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。