1.本发明涉及交互系统技术领域,主要涉及一种巡检机器人与智能终端间的交互系统。
背景技术:
2."巡检机器人"基于ocr和图像识别能力,能模拟专业的人工操作,在全站多级页面与资金交易全流程的各个场景进行点击、识别、检查等巡检操作,可以实现app页面自动化巡检监控,7*24小时不间断检查app交易、营销活动、账户安全等核心功能流程。前置发现和快速定位app内的各类问题,多角度地守卫用户的资金与交易安全,提升消费者体验。
3.巡检机器人与智能终端间往往需要交互系统,现有的交互系统是人机互相交换信息用的一种系统,其工作方式较简单,只具有输入信息及输出信息的功能,它自身不能完成任何信息处理动作,对各方来的数据信息它不能修正、不能解释、不能改变,受信或发信只能靠人按键或由中央主计算机发来的信息所启动。因此需要一种巡检机器人与智能终端间的交互系统。
技术实现要素:
4.本发明提供一种巡检机器人与智能终端间的交互系统,用以解决背景技术中的现有的交互系统工作方式较简单,只具有输入信息及输出信息的功能,它自身不能完成任何信息处理动作,对各方来的数据信息它不能修正、不能解释、不能改变的技术问题。
5.本发明解决上述技术问题采用的技术方案为:一种巡检机器人与智能终端间的交互系统,包括智能终端和巡检机器人端,所述的巡检机器人端包括中央处理器,中央处理器分别与第一控制模块、无线传输模块、存储模块、定位模块、报警模块、显示模块、自检模块和传感器模块连接,所述的第一控制模块与摄像模块连接,所述的智能终端包括云端服务器、无线接收模块、操作面板和处理模块。
6.优选的,所述的自检模块包括场景检测模块、激光测距模块和红外传感模块,所述的场景检测模块:巡检机器人实时识别所处的场景,并且及时将所处场景类型反馈至自检模块,所述的自检模块反馈至中央处理器,场景信息会反馈至智能终端,所述的激光测距模块:巡检机器人通过激光测距模块,巡检机器人判断与障碍物的距离,避免巡检机器人与障碍物发生碰撞,所述的红外传感模块:通过红外感应装置感应人员,实时满足人员使用需求。
7.优选的,所述的摄像模块采用高清摄像头采集现场信息,并将信息及时上传至第一控制模块,所述的第一控制模块控制摄像头角度和对焦等功能可以进行精准定位,并且第一控制模块会将采集的信息上传至中央处理器,所述的中央处理器进行后续动作,并且中央处理器会反馈信息至第一控制模块,操作摄像头,所述的报警模块:所述的自检模块和中央处理器端出现故障,报警模块会实时报警。
8.优选的,所述的存储模块会将中央处理器的动作信息进行储存,便于后期的检查
和维护,所述的定位模块:实时对巡检机器人进行定位,并且及时将定位信息上传至中央处理器,所述的显示模块:实时显示巡检机器人状态信息,所述的传感器模块:实时感应人员对巡检机器人的动作或者语音行为。
9.优选的,所述的无线传输模块对中央处理器的动作信息上传至智能终端内置的无线接收模块,通过智能终端对巡检机器人端进行操作。
10.优选的,所述的云端服务器通过网络保存信息,记录中央处理器动作信息,并且云端服务器可以进行自我学习,操作面板:工作人员通过操作面板操作实现无线操作巡检机器人端。
11.优选的,所述的处理模块包括图像处理模块和语音处理模块,图像处理模块巡检机器人对采集的到的图像进行处理,语音处理模块巡检机器人对采集的声音进行处理。
12.优选的,所述的传感器模块反馈的每一个信息,中央处理器会对信息处理,并且会在显示面板显示相应信息产生的画面。
13.现有技术相比,本发明的有益效果是:该巡检机器人与智能终端间的交互系统,巡检机器人和智能终端组合,巡检机器人端内置中央处理器,实现自我信息处理,并且可以及时将信息上传至智能终端,实现智能终端和巡检机器人端的交互,通过云端服务器和存储模块组合,可以实时储存各种动作信息便于检修,并且可以实时对数据信息进行修正,功能性更强,整体更为智能化。
附图说明
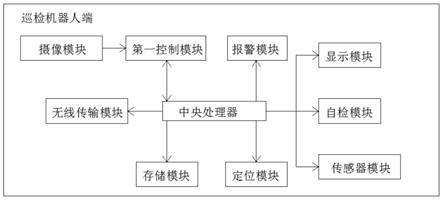
14.图1为本发明的巡检机器人端结构示意图;
15.图2为本发明的智能终端结构示意图;
16.图3为本发明的自检模块结构示意图。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.请参阅图1-3,本发明提供的一种实施例:一种巡检机器人与智能终端间的交互系统,包括智能终端和巡检机器人端,巡检机器人端包括中央处理器,中央处理器分别与第一控制模块、无线传输模块、存储模块、定位模块、报警模块、显示模块、自检模块和传感器模块连接,第一控制模块与摄像模块连接,智能终端包括云端服务器、无线接收模块、操作面板和处理模块。
19.进一步,所述的自检模块包括场景检测模块、激光测距模块和红外传感模块,场景检测模块:巡检机器人实时识别所处的场景,并且及时将所处场景类型反馈至自检模块,自检模块反馈至中央处理器,场景信息会反馈至智能终端,激光测距模块:巡检机器人通过激光测距模块,巡检机器人判断与障碍物的距离,避免巡检机器人与障碍物发生碰撞,红外传感模块:通过红外感应装置感应人员,实时满足人员使用需求。
20.进一步,所述的摄像模块采用高清摄像头采集现场信息,并将信息及时上传至第
一控制模块,第一控制模块控制摄像头角度和对焦等功能可以进行精准定位,并且第一控制模块会将采集的信息上传至中央处理器,中央处理器进行后续动作,并且中央处理器会反馈信息至第一控制模块,操作摄像头,报警模块:自检模块和中央处理器端出现故障,报警模块会实时报警。
21.进一步,所述的存储模块会将中央处理器的动作信息进行储存,便于后期的检查和维护,定位模块:实时对巡检机器人进行定位,并且及时将定位信息上传至中央处理器,显示模块:实时显示巡检机器人状态信息,传感器模块:实时感应人员对巡检机器人的动作或者语音行为,显示模块对应的是显示屏,显示屏安装在巡检机器人表面,并且传感器模块反馈的每一个信息,中央处理器会对信息处理,显示屏会将处理后的画面进行显示;例如,当人用手去遮挡巡检机器人的肚挤眼时,传感器模块可以检测到人的行为为“靠近肚挤眼”,中央处理器为该行为确定与之相匹配的预设语音和表情,通过显示模块显示屏来显示,显示屏显示害羞的表情。
22.本实施例中仅示意性的示出了一个传感器模块,一个巡检机器人端可以包括多个传感器,并且,各传感器的类型可以相同也可以不相同,可根据实际需要选用传感器,本发明中不加以限制。
23.进一步,所述的无线传输模块对中央处理器的动作信息上传至智能终端内置的无线接收模块,通过智能终端对巡检机器人端进行操作。
24.进一步,所述的云端服务器通过网络保存信息,记录中央处理器动作信息,并且云端服务器可以进行自我学习,操作面板:工作人员通过操作面板操作实现无线操作巡检机器人端,操作面板可以选择触摸屏,也可以选择多功能按键。
25.进一步,所述的处理模块包括图像处理模块和语音处理模块,图像处理模块巡检机器人对采集的到的图像进行处理,语音处理模块巡检机器人对采集的声音进行处理。
26.进一步,所述的传感器模块反馈的每一个信息,中央处理器会对信息处理,并且会在显示面板显示相应信息产生的画面。
27.工作原理:根据图1-3所示,在使用该巡检机器人与智能终端间的交互系统,巡检机器人和智能终端组合,巡检机器人端内置中央处理器,实现自我信息处理,并且可以及时将信息上传至智能终端,实现智能终端和巡检机器人端的交互,通过云端服务器和存储模块组合,可以实时储存各种动作信息便于检修,并且可以实时对数据信息进行修正,功能性更强,整体更为智能化。
28.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。