1.本发明涉及推定肩部僵硬的肩部僵硬推定技术。
背景技术:
2.在专利文献1中记载有一种使用了颈带的疲劳检测装置。颈带具备生物体用电极和疲劳判定部。
3.生物体用电极从使用者的颈部取得生物体信号。疲劳判定部基于从生物体信号得到的肌电成分,判定是否疲劳。
4.在先技术文献
5.专利文献
6.专利文献1:国际公开2017/086073号
技术实现要素:
7.发明要解决的课题
8.但是,在专利文献1所记载的疲劳检测装置中,存在不能准确地推定肩部僵硬的状态的情况。
9.因此,本发明的目的在于,提供一种能够更加准确地推定肩部僵硬的状态的肩部僵硬推定技术。
10.用于解决课题的手段
11.本发明的肩部僵硬推定方法,检测相互处于对抗关系的多个部位的骨骼肌的同时收缩,根据同时收缩的检测结果来推定肩部僵硬的状态。
12.虽然以往在感觉上知道颈部周围的肌肉的状态在某种程度上影响肩部僵硬,但是发明人们通过实验等,领先于他人首次确认了相互处于对抗关系的骨骼肌的同时收缩的状态与肩部僵硬的状态(程度)存在相关性。因此,在该方法中,能够通过使用相互处于对抗关系的多个部位的骨骼肌的同时收缩的检测结果来推定肩部僵硬的状态。
13.发明效果
14.根据本发明,能够更加准确地推定肩部僵硬的状态。
附图说明
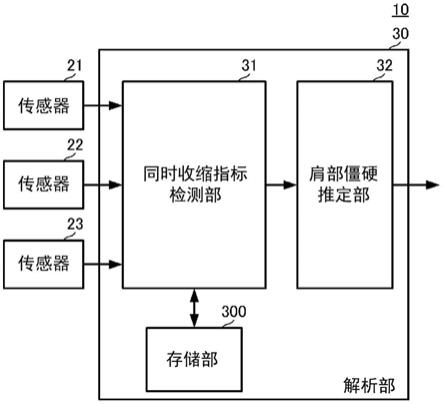
15.图1是示出第一实施方式的肩部僵硬推定装置的结构的功能框图。
16.图2是示出传感器的安装位置的图。
17.图3是用于说明同时收缩指标的计算概念的图。
18.图4是示出同时收缩指标与肩部僵硬指标的关系的坐标图。
19.图5是示出第一实施方式的肩部僵硬推定方法的主要处理的流程图。
20.图6是示出第二实施方式的肩部僵硬推定装置的结构的功能框图。
21.图7是示出第二实施方式的肩部僵硬推定方法的主要处理的流程图。
22.图8是示出第三实施方式的肩部僵硬推定方法的主要处理的流程图。
具体实施方式
23.(第一实施方式)
24.参照附图对本发明的第一实施方式的肩部僵硬推定技术进行说明。图1是示出第一实施方式的肩部僵硬推定装置的结构的功能框图。图2是示出传感器的安装位置的图。图3是用于说明同时收缩指标的计算概念的图。图4是示出同时收缩指标与肩部僵硬指标的关系的坐标图。
25.如图1所示,肩部僵硬推定装置10具备传感器21、传感器22、传感器23以及解析部30。传感器21、传感器22以及传感器23与解析部30具备能够数据通信的结构。数据通信可以为无线通信,也可以为有线通信。
26.传感器21、传感器22以及传感器23具备相同的结构。传感器21、传感器22以及传感器23例如是肌电传感器等生物体信号传感器,具备测量用电极和信号处理电路,对此省略了图示。测量用电极配置为与被检体接触,取得来自被检体的生物体信号(例如肌电信号)。信号处理电路执行生物体信号的放大、向解析部30的发送等。
27.例如,传感器21、传感器22、传感器23按照以规定的时间间隔设定的每个测量定时,持续地进行生物体信号的取得。而且,传感器21、传感器22以及传感器23按照以规定的时间间隔设定的每个发送定时发送所取得的生物体信号。测量定时与发送定时可以一一对应,也可以使每单位时间的发送定时的次数比测量定时的次数少。通过一一对应,能够不进行传感器21、传感器22、传感器23之间的同步,通过使每单位时间的发送定时的次数比测量定时的次数少,能够减少多个传感器21、22、23与解析部30的通信次数。
28.如图2所示,传感器21设置为与斜方肌91重叠。传感器21检测并输出电平根据斜方肌91的活动(肌肉收缩等)而变化的生物体信号。传感器22设置为与斜角肌92重叠。传感器22检测并输出电平根据斜角肌92的活动(肌肉收缩等)而变化的生物体信号。传感器23设置为与胸锁乳突肌93重叠。传感器23检测并输出电平根据胸锁乳突肌93的活动(肌肉收缩等)而变化的生物体信号。
29.需要说明的是,在本实施方式中,示出了使用分别针对不同的肌肉而配置的3个传感器21、22、23的方式。但是,传感器为分别针对不同的肌肉而配置的2个以上即可。
30.另外,在本实施方式中,示出了在斜方肌91、斜角肌92以及胸锁乳突肌93分别配置传感器的方式。但是,只要是相对于与肩部、颈部关联的骨骼肌处于对抗关系的肌肉的组,则也能够配置于其他肌肉。
31.解析部30具备同时收缩指标检测部31、肩部僵硬推定部32以及存储部300。同时收缩指标检测部31对应于本发明的“同时收缩检测部”。同时收缩指标检测部31和肩部僵硬推定部32例如由cpu等运算处理装置、ic、以及由它们执行的程序实现。需要说明的是,该程序例如存储在存储部300中。另外,该程序也可以保存在外部的服务器等并从该服务器取得。
32.存储部300由半导体存储介质、磁存储介质等实现。
33.概要地说,同时收缩指标检测部31使用来自传感器21、传感器22、传感器23的生物体信号,对同时收缩指标ind进行检测并向肩部僵硬推定部32输出。肩部僵硬推定部32使用同时收缩指标ind,推定与肩部僵硬的状态(程度)相应的肩部僵硬指标iss。
34.更具体而言,同时收缩指标检测部31从传感器21、传感器22、传感器23逐次取得生物体信号,存储并蓄积于存储部300。同时收缩指标检测部31预先存储有指标检测用的采样时间长度tt。
35.同时收缩指标检测部31从存储部300取得与采样时间长度tt对应的多个传感器的生物体信号。同时收缩指标检测部31计算所取得的多个传感器的生物体信号的时间波形的重叠面积s,根据该面积s检测同时收缩指标ind。
36.例如,根据图3的例子,同时收缩指标检测部31与采样时间长度tt对应地在不同的时刻设定采样时间长度tt1、tt2、tt3。采样时间长度tt1、tt2、tt3的长度相同。
37.同时收缩指标检测部31从存储部300取得与采样时间长度tt1对应的由传感器21取得的生物体信号ss21(与斜方肌91的活动对应的生物体信号)和由传感器22取得的生物体信号ss22(与斜角肌92的活动对应的生物体信号)。同时收缩指标检测部31根据相同时刻(也可以是大致相同时刻)的生物体信号ss21的电平和生物体信号ss22的电平,检测这些生物体信号的重叠(例如,较低的一方的生物体信号的电平)。同时收缩指标检测部31将该重叠的检测执行采样时间长度tt1的量。
38.同时收缩指标检测部31将重叠累计采样时间长度tt1的量,计算面积s1。面积s与同时收缩指标ind预先存储有关系。同时收缩指标检测部31使用该关系,根据面积s1来检测同时收缩指标ind1。
39.同样地,同时收缩指标检测部31针对采样时间长度tt2计算面积s2,检测同时收缩指标ind2。另外,同时收缩指标检测部31针对采样时间长度tt3计算面积s3,检测同时收缩指标ind3。
40.同时收缩指标检测部31将同时收缩指标ind1、ind2、ind3分别向肩部僵硬推定部32输出。同时收缩指标检测部31也可以预先存储同时收缩指标ind1、ind2、ind3,将它们同时向肩部僵硬推定部32输出。
41.需要说明的是,在上述的例子中,同时收缩指标检测部31分别隔开时间间隔地设定采样时间长度tt。但是,不限于此,例如,多个采样时间长度tt也可以连续,也可以部分地重叠。另外,采样时间长度tt的设定个数不限于3个,也可以是其他的个数。
42.另外,在上述的例子中,示出了使用传感器21的生物体信号ss21和传感器22的生物体信号ss22的方式。但是,生物体信号的组合也不限于此,只要如上述那样将从处于对抗关系的多个骨骼肌取得的生物体信号组合即司。
43.肩部僵硬推定部32预先存储有图4所示的推定函数fe那样的同时收缩指标ind与肩部僵硬指标iss的关系。肩部僵硬推定部32使用同时收缩指标ind和推定函数fe来推定肩部僵硬指标iss。例如,在图4的例子中,肩部僵硬推定部32使用推定函数fe,根据同时收缩指标ind1来推定肩部僵硬指标iss1,根据同时收缩指标ind2来推定肩部僵硬指标iss2,根据同时收缩指标ind3来推定肩部僵硬指标iss3。
44.发明人们通过各种实验,首次发现了肩部、颈部附近的处于对抗关系的骨骼肌的同时收缩的程度与肩部僵硬的状态(程度)存在相关关系。具体而言,如图4所示,发现了当同时收缩的程度变高时,肩部僵硬的状态恶化,换言之,肩部僵硬的程度变高。
45.同时收缩的程度对应于多个骨骼肌同时收缩的程度,与上述的面积s具有相关性(例如比例关系)。因此,同时收缩的程度能够通过上述的同时收缩指标ind来表示。
46.肩部僵硬指标iss被设定为值越大则肩部僵硬的程度越高。另外,推定函数fe是基于上述的实验等并根据同时收缩的程度(同时收缩指标ind)与肩部僵硬的程度(肩部僵硬指标iss)的相关性而设定的。
47.通过利用该关系和设定,肩部僵硬推定部32能够使用肩部僵硬指标iss来更加准确地推定肩部僵硬的程度。
48.需要说明的是,肩部僵硬推定部32也可以不使用推定函数fe,而是预先设定并存储同时收缩指标ind与肩部僵硬指标iss的关系表,参照该关系表来推定肩部僵硬指标iss。
49.如以上那样,通过使用本实施方式的结构,肩部僵硬推定装置10能够更加准确地推定肩部僵硬。尤其是肩部僵硬推定装置10能够更加准确地推定由所谓的直颈(straight neck)引起的肩部僵硬。
50.需要说明的是,在上述的说明中,还包含传感器21、传感器22以及传感器23构成肩部僵硬推定装置10。但是,如果具备另外取得从肩部、颈部附近的处于对抗关系的骨骼肌测量出的生物体信号的单元,则也能够将上述的解析部30设为肩部僵硬推定装置10。
51.在上述的说明中,示出了通过独立的功能部来执行与第一实施方式的肩部僵硬推定方法相关的各处理的方式,但也可以通过传感器和由运算处理装置执行的程序等来实现这些处理。在该情况下,使用图5所示的肩部僵硬推定方法即可。图5是示出第一实施方式的肩部僵硬推定方法的主要处理的流程图。需要说明的是,各处理的具体内容如上所述,除了需要追加说明的部分以外,省略具体处理的说明。
52.首先,传感器21、22、23测量肩部、颈部附近的处于对抗关系的骨骼肌的生物体信号ss(s11)。运算处理装置保存并蓄积生物体信号ss(s12)。
53.运算处理装置根据蓄积的生物体信号ss来检测同时收缩指标ind(s13)。运算处理装置根据同时收缩指标ind来推定肩部僵硬指标iss(s14)。
54.(第二实施方式)
55.参照附图对本发明的第二实施方式的肩部僵硬推定技术进行说明。图6是示出第二实施方式的肩部僵硬推定装置的结构的功能框图。
56.如图6所示,第二实施方式的肩部僵硬推定装置10a在解析部30a的结构中与第一实施方式的肩部僵硬推定装置10不同。肩部僵硬推定装置10a的其他结构与肩部僵硬推定装置10是同样的,省略同样部分的说明。
57.解析部30a在具备归一化基准值计算部33这一点、与其关联的各种处理中与第一实施方式的解析部30不同。解析部30a的其他结构以及处理与解析部30是同样的,省略同样部分的说明。
58.归一化基准值计算部33对计算同时收缩指标ind时的生物体信号的归一化基准值进行计算。更具体而言,通过进行以下的处理来计算归一化基准值。
59.在存储部300存储有用于进行归一化的生物体信号。用于进行归一化的生物体信号(归一化用生物体信号)的取得与用于推定肩部僵硬的生物体信号的取得分开进行。例如,对配置传感器21、传感器22、传感器23的斜方肌91、斜角肌92以及胸锁乳突肌93施加过大的负荷,并且测量归一化用生物体信号。更具体而言,归一化用生物体信号是向被检体施加负荷直至斜方肌91、斜角肌92以及胸锁乳突肌93的收缩在被检体中达到最大限度的定时测量出的生物体信号。归一化基准值计算部33计算该归一化用生物体信号的电平作为归一
化基准值。此时,归一化基准值计算部33按照每个骨骼肌来计算归一化基准值,例如,如果在该情况下,则按照每个斜方肌91、斜角肌92、胸锁乳突肌93来计算归一化基准值。
60.归一化基准值计算部33向同时收缩指标检测部31输出每个骨骼肌的归一化基准值。
61.同时收缩指标检测部31按照每个骨骼肌,通过归一化基准值将生物体信号归一化。例如,同时收缩指标检测部31通过用生物体信号的电平除以归一化基准值而将生物体信号归一化。
62.同时收缩指标检测部31使用被归一化的生物体信号,与上述的第一实施方式同样地检测同时收缩指标ind。而且,肩部僵硬推定部32根据基于被归一化的生物体信号的同时收缩指标ind,来推定肩部僵硬指标iss。
63.通过使用这样的结构和处理,同时收缩指标检测部31能够检测与被检体及被检体的状态相应的同时收缩指标ind。由此,肩部僵硬推定部32能够推定与被检体及被检体的状态相应的肩部僵硬指标iss。因此,肩部僵硬推定装置10a能够根据被检体及被检体的状态,更加准确地推定肩部僵硬的状态。
64.在上述的说明中,示出了通过独立的功能部来执行与第二实施方式的肩部僵硬推定方法相关的各处理的方式,但也可以通过传感器和由运算处理装置执行的程序等来实现这些处理。在该情况下,使用图7所示的肩部僵硬推定方法即可。图7是示出第二实施方式的肩部僵硬推定方法的主要处理的流程图。需要说明的是,各处理的具体内容如上所述,除了需要追加说明的部分以外,省略具体处理的说明。
65.传感器21、22、23针对肩部、颈部附近的处于对抗关系的骨骼肌来测量归一化用生物体信号(s21)。运算处理装置根据归一化用生物体信号,计算并存储归一化基准值(s22)。
66.传感器21、22、23测量肩部、颈部附近的处于对抗关系的骨骼肌的生物体信号ss(s11)。运算处理装置保存并蓄积生物体信号ss(s12)。
67.运算处理装置使用归一化基准值,将生物体信号ss的电平归一化(s23)。
68.运算处理装置根据归一化的生物体信号来检测同时收缩指标ind(s24)。运算处理装置根据同时收缩指标ind来推定肩部僵硬指标iss(s14)。
69.(第三实施方式)
70.参照附图对本发明的第三实施方式的肩部僵硬推定技术进行说明。第三实施方式的肩部僵硬推定装置的结构与上述的各实施方式所示的肩部僵硬推定装置是同样的,省略同样部分的说明。
71.图8是示出第三实施方式的肩部僵硬推定方法的主要处理的流程图。如图8所示,第三实施方式的肩部僵硬推定方法在追加了判定有无肩部僵硬的处理这一点与第二实施方式的肩部僵硬推定方法不同。第三实施方式的肩部僵硬推定方法的其他处理与第二实施方式的肩部僵硬推定方法是同样的,省略同样部分的说明。
72.运算处理装置预先存储有判定有无肩部僵硬用的阈值th。例如能够基于过去的实验结果等来设定阈值th。
73.如果肩部僵硬指标iss大于阈值th(s15:是),则运算处理装置判定为“存在肩部僵硬”(s16)。如果肩部僵硬指标iss为阈值th以下(s15:否),则运算处理装置判定为“不存在肩部僵硬”(s17)。
74.需要说明的是,在上述的各实施方式中,肩部僵硬推定装置和肩部僵硬推定方法为进行至推定肩部僵硬的状态、判定有无肩部僵硬为止的结构和方法,但也可以具备向外部通知这些推定结果或判定结果的功能。例如,肩部僵硬推定装置也可以通过图像、声音等来通知推定结果或判定结果,也可以通知给被检体所拥有的智能手机的应用等。
75.另外,在上述的各实施方式中,示出了将肌电信号用作生物体信号的方式,但只要是状态根据骨骼肌的活动而变化的信号即可,也能够应用其他的生物体信号。
76.另外,上述的各实施方式的结构和处理能够适当组合,能够起到与各个组合相应的作用效果。
77.附图标记说明
78.10、10a:肩部僵硬推定装置;
79.21、22、23:传感器;
80.30、30a:解析部;
81.31:同时收缩指标检测部;
82.32:肩部僵硬推定部;
83.33:归一化基准值计算部;
84.91:斜方肌;
85.92:斜角肌;
86.93:胸锁乳突肌;
87.300:存储部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。