内窥镜
1.本发明涉及内窥镜,且更特别地涉及用于辅助插管的柔性内窥镜。
2.内窥镜是用于检查中空器官或体腔内部的设备。内窥镜通常包括手柄、可以是刚性或柔性的操作部件,以及用于将图像从操作部件的远侧端部(在使用期间位于患者体内)传输到目镜或体外显示器的装置。柔性内窥镜的实例包括纤维镜和视频镜。纤维镜通常包括位于操作部件内的一束光纤维,用于将图像从透镜传输到目镜。由于光纤维的存在,特别地,纤维镜既易碎又昂贵。视频镜包括位于操作部件中的摄像头和连接的视频显示器。视频镜需要更长的设置时间,并且占用更多空间。
3.最近,内窥镜也被专门配置为辅助插管。插管是将气管内导管通过口腔并插入患者气管的过程。这允许患者连接到呼吸机以帮助呼吸。这可能是因为患者在没有帮助的情况下无法呼吸,例如在麻醉期间,或者因为患者无法维持其气道。
4.管心针是用于辅助插管的常规装置的实例。管心针是一种可延展的装置,其在将气管内导管插入患者的气管之前插入气管内导管。管心针的延展性允许用户使管心针预先成形,其然后在插入气管之前将周围的气管内导管保持在所需的形状。然后使用喉镜将气管内导管引入气管中,使得气管内导管的远侧端部位于气管内,并且气管内导管的近侧端部从患者口中伸出。一旦气管内导管的远侧端部适当地定位在气管内,则管心针连同喉镜一起被撤回。
5.探条是用于辅助插管的常规装置的另一实例。探条是一种柔性装置,其被用于在气管内提供正位置以将气管内导管引导到气管中。通常将探条引入气管中,使得远侧端部位于气管内,并且近侧端部从患者口中伸出。然后将气管内导管在探条上“架设”,这包括将探条的近侧端部插入气管内导管的远侧端部中,并将气管内导管在探条的外表面上并沿着探条的外表面滑动,直到气管内导管的远侧端部适当地定位在气管内。因此,探条用作放置气管内导管的引导件。然后将探条从气管内导管和患者身上取出。
6.内窥镜使用户能够看到身体内的图像,例如靠近气管内导管的尖端的图像,同时将气管内导管插入气管,例如通过上述那些方法或其他方法。柔性内窥镜通常以两种方式之一工作,具体取决于它们的长度。较长的内窥镜用于预装载气管内导管,该气管内导管保持在操作部件的近侧端部处,然后一旦操作部件的远侧端部正确地定位于患者的气管内,就在操作部件上推进。较短的内窥镜仅用于观察患者的声带,同时将气管内导管插入气管中,以便可以相应地引导和调整气管内导管的放置。
7.现在已经设计出一种改进的内窥镜,其克服或基本上减轻了与现有技术相关的缺点。
8.根据本发明的第一方面,提供了用于插管的内窥镜,该内窥镜包括外壳、具有显示屏的显示装置,以及从外壳延伸的操作部件,该操作部件被配置为插入患者的气道中并将图像传输到显示屏,该外壳包括偶联到操作部件的致动器和偶联到显示屏的保持器,该外壳具有手柄部分,后者至少包括致动器,并且该致动器可以由操作者相对于保持器单手旋转,使得操作部件相对于显示屏是可旋转的。
9.本发明是有利的,主要是因为内窥镜的外壳包括偶联到操作部件的致动器和偶联
到显示屏的保持器,并且该致动器可由操作者相对于保持器单手旋转,使得操作部件相对于显示屏是可旋转的。这使得内窥镜能够具有安装到内窥镜外壳或与内窥镜外壳一体的显示屏,当操作部件旋转时显示屏不会相对于操作者旋转。
10.这与本领域已知的安装在内窥镜上的显示屏形成对比,因为那些内窥镜是由用户用他们的手旋转外壳来旋转的,安装的显示器也将随之旋转。
11.根据本发明的另一方面,提供了制造如上定义的内窥镜的方法,该方法包括以下步骤:
12.(i)提供外壳、具有显示屏的显示装置和从所述外壳延伸的操作部件,所述操作部件被配置为插入患者的气道中并将图像传输到所述显示屏,并且所述外壳包括偶联到所述操作部件的致动器和偶联到所述显示屏的保持器,以及
13.(ii)将外壳布置成具有至少包括致动器的手柄部分,并且将该致动器布置成可由操作者相对于保持器单手旋转,使得操作部件相对于显示屏是可旋转的。
14.致动器和保持器可以布置成使得它们可与操作者身体的第一部分和第二部分接合,操作者身体的第一部分和第二部分能够相对于彼此移动。操作者身体的第一部分可以是操作者的第一只手和相关手指和拇指的一部分。操作者身体的第二部分可以是操作者的第一只手和相关手指和拇指的不同部分。替代地,操作者身体的第二部分可以是操作者身体的另一部分。
15.手柄部分可以包括致动器和保持器。也就是说,致动器和保持器可以是手柄部分的一部分。在这种布置中,致动器可以布置成使得其可以被操作者的至少一根手指或拇指接合,并且保持器可以布置成使得它可以被操作者的同一只手的至少一根不同的手指或拇指接合。致动器可以通过至少第一移动路径移动。第一移动路径可以是弧形移动路径。操作者可能能够通过第一只手的手指的相对移动或通过第一只手的手指和拇指的相对移动来实现致动器和保持器相对于彼此的旋转。例如,当操作者在使用中握住致动器时,致动器可以朝向手柄部分的顶端定位,使得致动器被布置成可被操作者的食指,即最靠近操作者拇指的手指,或者操作者的拇指接合,并且保持器可以是手柄部分的剩余部分,使得保持器可被操作者手的剩余部分接合。因此,当操作者相对于他们手的其余部分移动他们的食指或拇指时,致动器将相对于保持器旋转,导致操作部件旋转,同时保持显示屏相对于操作者的位置。
16.替代地,手柄部分可以包括致动器,但不包括保持器。也就是说,保持器可以远离手柄部分定位。在这种布置中,致动器可以布置成被操作者的手和相关手指接合,并且保持器可以布置成被操作者身体的不同部分接合。操作者可能能够通过他们的手相对于他们身体的不同部分的移动来实现致动器相对于保持器的旋转。例如,保持器可以从手柄部分延伸,以便与操作者的手腕或手臂接合,例如靠在操作者的手腕或手臂上,该手腕或手臂是与致动器接合的手的。因此,当操作者相对于他们的手腕或手臂移动他们的手指时,致动器将相对于保持器旋转,导致操作部件旋转,同时保持显示屏相对于操作者的位置。
17.致动器和保持器可以围绕旋转轴线相对于彼此旋转。旋转轴线可以大体上或基本上与操作部件或手柄部分对齐。在优选实施方案中,致动器和保持器可以围绕操作部件的纵向轴线和/或围绕手柄部分的纵向轴线相对于彼此旋转。操作部件可以从外壳基本上平行于手柄部分的纵向轴线延伸。
18.旋转轴线可以大体上或基本上与操作部件的中心纵向轴线和/或手柄部分的中心纵向轴线对齐。
19.与操作部件的中心纵向轴线或手柄部分的中心纵向轴线大体上或基本上对齐可被定义为分别与操作部件的中心纵向轴线或手柄部分的中心纵向轴线大体上或基本上平行,例如,与中心纵向轴线成小于45度、30度、15度或5度的角度。
20.与操作部件的中心纵向轴线或手柄部分的中心纵向轴线大体上或基本上对齐可以定义为在通过操作部件或手柄部分的横截面中大体上或基本上居中地定位,例如在操作部件或手柄部分的横截面半径的50%、25%、10%或5%内,其中通过操作部件或手柄部分的横截面垂直于操作部件或手柄部分的中心纵向轴。
21.操作部件相对于外壳的手柄部分的至少一部分,例如相对于操作者手掌所在的手柄部分的一部分可以是可旋转的。致动器可以包括第一致动器部件,用于控制操作部件相对于手柄部分,即围绕手柄部分和/或操作部件的纵向轴线的旋转。
22.这是有利的,因为无需移动或旋转外壳的手柄部分的至少一部分,例如操作员手掌所在的手柄部分的一部分,就可以控制操作部件,这提供了使用过程中改进的控制。这是特别有益的,因为在使用中,内窥镜被保持在高处,例如在操作者的头部上方,以便将操作部件引入患者的气道中,这使得操作者的手掌所在的手柄部分的一部分旋转是困难的。
23.第一致动器部件可以是机械形式的。在第一致动器部件是机械形式的情况下,第一致动器部件可以包括例如可以由用户的手指操作的可移动部件。第一致动器可以布置在外壳的相对于操作部件从其延伸的端部的相对端部处。第一致动器部件可以布置成用于枢转或旋转移动。第一致动器部件可能可以相对于手柄部分,例如围绕操作部件和/或手柄部分的纵向轴线枢转或旋转。第一致动器部件可以具有臂的形式。替代地,第一致动器部件可以包括轮,该轮可以在外壳中,例如围绕操作部件和/或手柄部分的纵向轴线旋转。轮可以定位在外壳中的槽内。轮可以布置在外壳的相对于操作部件从其延伸的端部的相对端部处。轮可以机械地偶联到操作部件,使得轮的旋转引起操作部件的旋转。轮可能可以沿第一方向旋转,以使操作部件相对于手柄部分沿第一方向旋转。轮可能可以沿第二方向旋转,以使操作部件相对于手柄部分沿第二方向旋转。第一和第二方向可以是旋转地相反的方向。轮可以由用户的手指操作。
24.替代地,致动器可由外壳的头部部分形成,其可相对于手柄部分的其余部分和显示屏装置旋转。手柄部分和显示屏装置可以相对于彼此固定。可旋转头部部分可以布置在外壳的相对于操作部件从其延伸的端部的相对端部处。可旋转头部部分可以相对于外壳的手柄部分布置,使得它可以由用户的食指和/或拇指旋转。
25.操作部件的远侧尖端部分可能相对于操作部件的主体是可移动的,并且操作部件的远侧尖端部分的这种移动可以由用户从内窥镜的外壳控制,例如从致动器控制。操作部件的远侧尖端部分的这种受控移动有助于观察患者身体内部和在插管期间引导气管内导管。
26.远侧尖端部分的移动可以包括远侧尖端部分相对于操作部件的主体部分,例如围绕铰接或枢轴部分,或围绕弯曲部分的定向角的变化。因此,远侧尖端部分可以相对于操作部件的主体部分倾斜,即不平行,并且例如可以相对于主体部分成倾斜角度。替代地,远侧尖端部分可以相对于操作部件的主体部分成180度的角度。在该移动期间,远侧尖端部分的
形状可以保持基本恒定。
27.外壳可以包括第二致动器部件,用于在使用中控制操作部件的远侧尖端部分的移动,即改变操作部件的远侧尖端部分相对于操作部件的主体的定向角,例如,在操作部件和外壳的中心纵向轴线所在的平面中,该平面可以是患者身体的中间平面。第二致动器部件可以安装在外壳的致动器上。在优选实施方案中,第二致动器部件可以安装在第一致动器部件上,或反之亦然。
28.第一致动器部件和第二致动器部件可以布置成由操作者单手操作,例如使用同一只手的相同或不同手指。第一致动器部件和第二致动器部件均可以使用操作者的同一只手的单个手指来操作。第一致动部件可由第一单指操作,而第二致动部件可由第二单指操作。第一致动部件可由第一单指操作,而第二致动部件同时可由第二单指操作。第一手指和第二手指可以是操作者的同一只手的相同或不同的手指。
29.第二致动器部件,在本文中被称为远侧尖端部分致动器,可以是机械形式的。远侧尖端部分致动器可以具有接合部分,该接合部分可由用户操作。在远侧尖端部分致动器是机械形式的情况下,接合部分可以是例如可以由用户的拇指操作的可移动臂。接合部分可以通过至少第二移动路径移动。第二移动路径可以基本上位于单个平面中。第二移动路径可以基本上是弧形的。在这种布置中,远侧尖端部分致动器可以由用户相对于外壳的纵向轴线移动,例如线性地或通过弧线旋转。例如,接合部分可包括从外壳中的狭槽突出的杆,该杆可在其中相对于外壳的纵向轴线移动。在接合部分是杆的情况下,第二移动路径优选地是弧形的。远侧尖端部分致动器可以相对于外壳的纵向轴线在第一致动器部件方向上移动,以在第一操作方向上移动和/或改变远侧尖端部分的取向,并且远侧尖端部分致动器可以相对于外壳的纵向轴线在第二致动器方向上移动,以在第二操作方向上移动和/或改变远侧尖端部分的取向。第一和第二致动器方向可以是相反的方向,或者通过弧线旋转地或者线性地相反,并且第一和第二操作方向可以是相反的方向,或者通过弧线旋转地或者线性地相反。
30.替代地,远侧尖端部分致动器可以包括一对按钮,例如,其可以由用户的拇指或一对手指按压。第一按钮的接合部分可以通过至少第一移动路径移动,并且第二按钮的接合部分可以通过至少第二移动路径移动。第一和第二移动路径可以基本上位于单个平面中。第一和第二移动路径可以基本上是线性的。在这种布置中,每个按钮可以由用户基本上垂直于外壳的纵向轴线移动或按压。第一按钮可以由用户移动或按压以移动和/或改变远侧尖端部分在第一操作方向上的取向。第二按钮可以由用户移动或按压以移动和/或改变远侧尖端部分在第二操作方向上的取向。
31.远侧尖端部分致动器可以安装在第一致动器部件上。例如,在第一致动器部件可在外壳内或相对于外壳旋转的情况下,远侧尖端部分致动器可以相对于第一致动器部件移动或按压。在优选实施方案中,第一致动器部件可以围绕外壳的纵向轴线旋转,并且远侧尖端部分致动器部件可以至少部分地在基本上平行于外壳的纵向轴线的方向上移动。替代地,第一致动器部件可以围绕外壳的纵向轴线旋转,并且远侧尖端部分致动器部件可以包括在第一致动器部件上间隔开的两个或更多个按钮,例如沿着外壳的纵向轴线布置的。两个或更多个按钮可以基本上垂直于外壳的纵向轴线按压。
32.替代地,远侧尖端部分致动器的接合部分可以是轮,该轮可以在外壳中,例如围绕
操作部件和/或手柄部分的纵向轴线旋转。轮可以定位在外壳中的槽内。轮可以布置在外壳的相对于操作部件从其延伸的端部的相对端部处。轮可以机械偶联到操作部件。轮可以围绕外壳的纵向轴线在第一致动器方向上旋转,以在第一操作方向上移动和/或改变远侧尖端部分的取向,并且轮可以围绕外壳的纵向轴线在第二致动器方向上旋转,以在第二操作方向上移动和/或改变远侧尖端部分的取向。第一和第二致动器方向可以是旋转地相反的方向。轮可以由用户的手指操作。
33.这是有利的,因为它允许操作者单手控制操作部件的移动。
34.第二致动器部件,例如远侧尖端部分致动器,可以设置在外壳的第一表面上,该第一表面与显示屏位于外壳的同一侧。在外壳包括在相对于操作部件从其延伸的外壳端部的外壳的相对端部处布置的头部部分的情况下,第二致动器部件,例如远侧尖端部分致动器,可以设置在外壳的头部部分的第一表面上,该第一表面与显示屏位于外壳的同一侧,使得远侧尖端部分致动器可以由用户的拇指操作。
35.提供在外壳的一部分,例如外壳的头部部分上形成的第一致动器部件和包括第二致动器部件的该部分,例如远侧尖端部分致动器,允许单手控制操作部件的移动。
36.上述第一致动器部件可以设置在外壳的第二表面上,例如外壳的头部部分的第二表面上,该第二表面位于外壳的与远侧尖端部分致动器和显示屏相对的表面上,使得第一致动器部件可以由用户的食指操作。
37.这种特征的组合在装置的可用性方面可能是特别有益的,并因此,根据本发明的另一方面,提供了用于插管的内窥镜,该内窥镜包括具有手柄部分的外壳、具有显示屏的显示设备、从外壳延伸的操作部件,该操作部件被配置为插入患者的气道中并将图像传输到显示屏、设置在手柄部分的第一表面上并偶联到操作部件的第一致动器部件,以及设置在手柄部分的第二表面上并偶联到操作部件的第二致动器部件,该第一和第二表面是手柄部分的相对表面。
38.第一致动器部件可以布置成控制操作部件相对于外壳、显示屏和手柄部分中的任何一个或所有的旋转移动。第二致动器部件可以布置成控制操作部件的远侧尖端部分的移动,即改变操作部件的远侧尖端部分相对于操作部件的主体的定向角,例如,在操作部件和外壳的中心纵向轴所在的平面中。
39.第一致动器部件和第二致动器部件可以布置成由操作者单手操作,例如使用同一只手的不同手指。第一致动器部件和第二致动器部件均可以使用操作者的同一只手的单个手指来操作。第一致动部件可由第一单指操作,而第二致动部件可由第二单指操作。第一致动部件可由第一单指,例如手指操作,而第二致动部件同时可由第二单指,例如拇指操作。第一手指和第二手指可以是操作者的同一只手的不同的手指。
40.在替代布置中,外壳可以包括单个致动器,用于控制操作部件相对于手柄部分的旋转,以及用于控制操作部件的远侧尖端部分的移动(即,关节运动)。单个致动器可以通过至少两条路径移动。两条路径可以各自在两个端点之间延伸。两条路径可能是不同的路径。两条路径可能不同,因为它们各自具有两个不同的端点,即两条路径不共有任何端点。单个致动器可以通过至少第一移动路径移动以控制操作部件相对于手柄部分的旋转。第一移动路径可以例如是基本上弧形的。单个致动器可以通过至少第二移动路径移动以控制操作部件的远侧尖端部分的关节运动。第二移动路径可以例如是基本上线性的。单个致动器可以
通过第一移动路径移动,以控制操作部件相对于手柄部分的旋转,并且在沿着该第一移动路径的任何点处,可以沿着至少一个另外的移动路径移动,以控制操作部件的远侧尖端的关节运动。
41.单个致动器可以包括可由操作者接合的接合部分。接合部分可以从外壳突出,使得它可由操作者的至少一根手指或拇指接合。接合部分可以包括可移动部件。可移动部件可布置成用于线性和/或枢转和/或旋转移动。可移动部件可以具有臂的形式。可移动部件可以在几何表面内、在由致动器限定的边界内,例如围绕球形接头在所有方向上移动。也就是说,几何表面可以是弯曲的几何表面。例如,单个致动器可以是操纵杆。
42.外壳还可包括握持部分,用于至少由用户的食指接合。握持部分可以设置在外壳的第二表面上,该第二表面位于外壳的与显示屏相对的一侧上。在外壳包括在相对于操作部件从其延伸的外壳端部的外壳的相对端部处布置的头部部分的情况下,握持部分可以设置在外壳的头部部分的第二表面上,该第二表面位于外壳的与显示屏相对的一侧上,使得握持部分可以至少由用户的食指接合。
43.根据本发明的另一方面,提供了用于插管的内窥镜,该内窥镜包括包含手柄部分和显示屏部分的外壳,该显示屏部分具有显示屏、和从外壳延伸的操作部件,该操作部件被配置为插入患者的气道中并将图像传输到显示设备、以及在外壳的手柄部分和外壳的显示屏部分之间延伸的臂部分,使得显示屏与手柄部分在空间上分离。
44.在外壳的手柄部分和外壳部分的显示屏部分之间延伸的臂部分使得显示屏在空间上与手柄部分分开,其优点在于它能够实现在使用中显示屏容易被操作者看到的布置,无论内窥镜是在开始插入患者气道时,例如当操作者的手臂完全抬起时,还是内窥镜完全插入到患者气道中时,例如当操作者的手臂较低时。
45.在外壳的手柄部分和外壳部分的显示屏部分之间延伸的臂部分,使得显示屏在空间上与手柄部分分开,还使得用户的手腕能够定位在外壳的显示屏部分和手柄部分之间的布置成为可能。这是有利的,因为显示屏的定位确保它在使用中不会被操作者的手腕遮挡。
46.根据本发明的另一方面,提供了制造如上定义的内窥镜的方法,该方法包括:提供包括手柄部分和显示屏部分的外壳,该显示屏部分具有显示屏;从外壳延伸的操作部件,该操作部件被配置为插入患者的气道中并将图像传输到显示设备;以及在外壳的手柄部分和外壳的显示屏部分之间延伸的臂部分,使得显示屏与手柄部分在空间上分离。
47.显示屏部分可以包括通过其可以看到显示屏的窗口。显示屏部分可以具有其中容纳显示设备的大致立方体部分。因此,显示屏可以与外壳的手柄部分在空间上分离,例如使得用户的手腕可定位在显示屏部分和外壳的手柄部分之间。
48.显示屏部分可以设置在操作部件从其延伸的外壳端部的近侧。臂部分在使用时可朝向用户延伸,使得显示屏部分在使用时比手柄部分更靠近用户。臂部分可以从操作部件从其延伸的外壳端部延伸。
49.手柄部分可以是基本上圆柱形的。手柄部分的长度和/或周长可以与人手的平均握持尺寸相似。手柄部分可以具有弯曲的中心纵向轴线。
50.臂部分可以布置成靠在用户手腕的内侧或外侧。外壳的臂部分具有的横截面宽度可以小于外壳的显示屏部分的横截面宽度。臂部分具有的横截面宽度可以小于手柄部分的横截面宽度。臂部分可以从手柄部分基本上垂直地延伸,例如与其成70-120
°
的角度。显示
屏可以位于臂部分相对于手柄部分的相对端,即臂部分的远侧端部。
51.显示屏的操作面与手柄之间的间距可以为至少1cm、至少2cm、至少5cm或至少10cm。
52.显示屏可以是lcd屏幕。这是有利的,因为显示屏的生产成本低廉,降低了内窥镜的总体制造成本,并允许将其实现为一次性内窥镜。替代地,显示器可以是oled屏幕。
53.显示屏的中心视轴线可以相对于臂部分的纵向轴线倾斜成一定角度,例如向上朝向用户的眼睛,并且显示屏的中心视轴线可以相对于手柄部分的中心纵向轴线倾斜成一定角度。具体地,显示屏的顶部边缘可以朝向手柄部分倾斜。显示屏的形状可以是基本上正方形或基本上矩形的。
54.操作部件可以从外壳的一端延伸。操作部件可以从外壳沿基本上垂直于外壳的臂部分的方向延伸,例如以70-120
°
的角度。这是有利的,因为它使得显示屏的位置能够在使用中位于操作部件上方,使得无论操作部件是部分插入患者口中还是完全插入患者器官中,都可以容易地看到显示屏。
55.外壳还可包括头部部分。外壳的头部部分可以是基本上圆柱形的。外壳的头部部分可以具有与手柄部分相似的直径。外壳的臂部分可以从手柄部分的第一端延伸。头部部分可以从手柄部分的第二端延伸。第一端和第二端可以是相对的端。
56.操作部件的长度可以显著大于其直径。操作部件的长度可以至少基本上类似于成人或人类婴儿的口与气管之间的距离。然而,优选地,操作部件的长度显著大于成人或人类婴儿的口与气管之间的距离,这允许气管内导管被装载,并且然后一旦操作部件的远侧端部被正确地定位在患者的气管内,则推进到内窥镜上。操作部件的直径可以显著小于人气管的平均直径。操作部件的直径可以显著小于气管内导管的平均直径。
57.操作部件可以被配置为容纳在气管内导管中。操作部件的形状和/或尺寸可以设置为容纳在气管内导管中。操作部件的形式可以基本上是细长的。操作部件可以具有1.0mm至10.0mm的直径,例如外径。操作部件可以具有2.0mm至5.0mm的直径。操作部件可以具有100mm至1000mm的长度。操作部件可以具有200mm至700mm的长度。
58.操作部件的远侧端部可以包括圆形尖端。通过远侧端部意指在使用期间首先进入患者气管的操作部件的一端。圆形尖端可以包括圆形横截面和/或可以包括基本上半球形的整体形式。
59.操作部件可以包括用于照亮身体内表面的光源,从其获得传输到显示装置的图像。光源可以定位在操作部件的远侧尖端。光源可以是led。
60.替代地,光源可以包括一个或多个光导,例如光纤,其从外壳中的灯延伸到操作部件的远侧端部。外壳中的灯可以是led。操作部件可以被配置成在其远侧端部接收光,例如来自光源的被成像的身体的内表面反射的光,以形成传输到显示装置的图像。可以通过操作部件远侧端部处的孔和/或透镜接收光。
61.内窥镜可以包括用于将图像转换成电子格式的装置,例如图像传感器。显示装置可以接收电子格式的图像,例如传统的图像或视频格式。图像传感器可以适于捕获静止图像和/或视频序列图像。
62.图像传感器可以定位在操作部件的远侧端部。在这种布置中,图像可以以电子格式传输到显示装置,例如通过穿过操作部件和外壳到显示装置的有线连接。替代地,可以将
形成图像的光传输到由外壳容纳的、在操作部件的近侧端部处的图像传感器。在这种布置中,操作部件可以包括一个或多个光导,例如光纤,其从操作部件的远侧端部延伸到外壳中的图像传感器。
63.图像可以是瞬时图像。也就是说,在使用中,显示屏可以显示患者气管的实时图像。图像可以是单一图像。这是有利的,因为它允许用户实时查看对气管内导管在气管中的定位的调整。替代地,图像可以是视频图像。
64.操作部件可以包括穿过其中的通道。通道可以平行于操作部件的纵向轴线延伸。通道可以包括在操作部件的近侧和远侧端部处的开口。在操作部件包括这样的通道的情况下,外壳可以包括通向操作部件近侧端部处的开口的孔,使得可通过外壳进入通道。该通道可用于在使用中从患者的气管插入或抽出流体。
65.根据本发明的另一方面,提供了用于插管的内窥镜,该内窥镜包括具有手柄部分的外壳、具有显示屏的显示装置、和从外壳延伸的操作部件,该操作部件被配置为插入患者的气道中并将图像传输到显示装置,其中所述外壳容纳所述显示装置,并且所述显示屏可通过外壳中的窗口看到。
66.本发明的该方面是有利的,主要是因为外壳容纳显示装置,并且显示屏可通过外壳中的窗口看到。这使得包括显示装置的内窥镜能够作为集成装置提供,并因此使得显示装置和内窥镜的操作部件能够在无菌环境中包装在一起,例如作为单次使用的一次性装置,从而降低感染传播的风险。与之不同,连接到视频镜的视频显示器在很长一段时间内用于多次操作以证明其成本合理,并因此需要反复消毒以降低感染传播的风险。
67.本发明还提供显著的制造优势,如降低制造成本。
68.根据本发明该方面的内窥镜因此可以包括单次使用的一次性装置,该装置被提供在单个无菌包装中。包括容纳在其中的显示装置的外壳可以作为单个物品提供给用户,这不需要由最终用户组装。因此,外壳可以没有到外部显示装置的输出连接。
69.显示装置可以容纳在外壳的显示屏部分内,该显示屏部分与外壳的至少一个手柄部分一体地形成。外壳的显示屏部分和/或显示装置可以,例如在不拆卸或破坏内窥镜的外壳的情况下,是不可从内窥镜的外壳的其余部分移除的。内窥镜的外壳可以包括至少一个外壳部件,该外壳部件限定了手柄外壳部分和显示屏外壳部分的一部分。
70.显示屏外壳部分可以由与手柄部分相同的材料形成。显示屏外壳部分可以由与外壳的其余部分相同的材料形成。
71.操作部件可以经由连接器连接到内窥镜的外壳。操作部件可以可释放地附接至连接器,并因此可从内窥镜的外壳拆卸并且重新附接至内窥镜的外壳。替代地,操作部件可以经由连接器永久地附接到内窥镜的外壳,即不可拆卸,例如与其一体形成。
72.根据本发明的另一方面,提供了制造如上定义的内窥镜的方法,该方法包括以下步骤:
73.(i)提供包括手柄部分的外壳、具有显示屏的显示装置和从外壳延伸的操作部件,该操作部件被配置为插入患者的气道中并将图像传输到显示装置,以及
74.(ii)组装外壳以容纳显示装置,使得通过外壳中的窗口可以看到显示屏。
75.现在将参考附图仅通过示例的方式描述本发明的实践实施方案,其中:
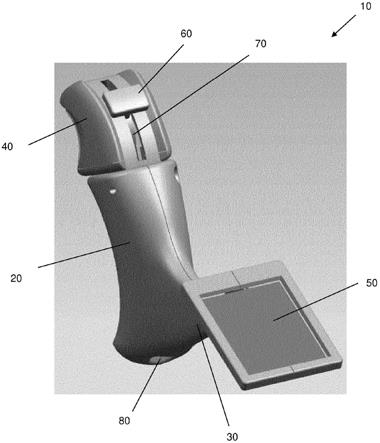
76.图1是内窥镜的前透视图;
77.图2是图1的内窥镜的后透视图;
78.图3是连接到操作部件的图1和2的内窥镜的底侧透视图;
79.图4是通过图1-3的内窥镜的横截面透视图;并且
80.图5是类似于图1-3的内窥镜的后透视图,但是具有用于操作部件的旋转移动的替代致动机构。
81.图1-3示出了根据本公开的内窥镜10。内窥镜10包括在一端具有头部部分40的本体部分20。从本体部分20的另一端延伸的是臂部分30。在臂部分30的另一端是包括显示屏的一体的显示部分50。头部部分40包括安装在槽70内的致动器60。本体部分20还包括端口80,其被配置为接收并连接到操作部件,该操作部件用于在使用中插入患者的气道中。
82.本体部分20为基本上圆柱形的主体,其具有的周长与长度与用户的握持部相近,以使用户能够容易地单手握持本体部分20。本体部分20具有基本上凹入的后边缘,使得头部部分40和本体部分20的下端在内窥镜10的后部进一步向外延伸,进一步帮助用户握持内窥镜10。
83.头部部分40是与本体部分20具有相似周长的也基本上为圆柱形的主体。臂部分30基本上垂直于本体部分20延伸,使得本体部分20和臂部分30形成基本上l形的内窥镜主体。臂部分30是具有圆形边缘的基本上为立方体的主体,其直径明显小于本体部分20和头部部分40。
84.在其前侧,头部部分40包括凹部,该凹部中具有槽70。在槽70内是致动器60,其可从槽70的一端竖直移动到另一端。槽70和致动器60也位于头部部分40的前侧,使得用户可以在握住内窥镜10并观看显示屏时用其拇指操作致动器60。
85.在本体部分20的底端,即与头部部分40相对的表面,是端口80。端口80基本上是圆形的并且被配置成接收并连接到柔性操作部件100(如图3所示),该操作部件100用于在使用中插入患者内。
86.在头部部分40的与槽70和致动器60相对的一侧是握持部分90(参见图2)。握持部90位于头部部分40的后侧,使得当握持内窥镜10时用户的食指可以接触握持部90。
87.图4显示了穿过图1-3的内窥镜10的横截面视图,其说明了头部部分40和致动器60控制接纳在端口80内的操作部件100的移动的机制。
88.头部部分40可相对于本体部分20旋转,并经由连接部件120与操作部件100固定连接。头部部分40和连接部件120可以形成为整体组件,用于插入穿过本体部分20的相应接收通道中。在使用中,操作部件100通过端口80插入并固定连接到连接部件120。连接部件120在端口80和头部部分40之间延伸穿过本体部分20,将头部部分40机械地连接到接收在其中的操作部件100。
89.因此,头部部分40相对于本体部分20的旋转引起连接部件120和操作部件100相对于本体部分20,即围绕操作部件100的纵向轴线的相应旋转。因此,头部部分40沿逆时针方向旋转导致操作部件100沿逆时针方向旋转,并且头部部分40沿顺时针方向旋转导致操作部件100沿顺时针方向旋转。
90.握持部分90对于该功能特别有用,因为它允许握持内窥镜的用户仅使用接触握持部分90的食指来旋转头部部分40。
91.这种布置允许用户旋转头部部分40,并从而仅用一根手指旋转操作部件100,同时
用他们手的其余部分保持本体部分20静止。这种相对移动使用户能够在不改变显示器50相对于他们自己的取向的情况下控制操作部件100,从而允许他们在使用中保持显示器的恒定视图,并从而保持患者气管的恒定视图。
92.致动器60包括可在槽70内移动的杆,以便在使用中控制操作部件100的移动。特别地,致动器可在槽70内移动,以控制操作部件100的远侧尖端部分的取向,使得操作部件100的远侧尖端部分可相对于操作部件100的主体移动一系列倾斜角度。在使用中,操作部件100被插入患者的气管中,然后操作部件100的远侧尖端部分可以相对于操作部件100的主体移动。适当的机制详细示出于us 2018/0303317 a1中。
93.连接部件120包括通道,通过该通道的一对线将致动器60连接到接收在端口80内的操作部件100。致动器60机械连接到轮140,轮140继而又在每根线的第一端连接到该对线。线在每跟线的第二端连接到操作部件100。
94.当致动器60在槽70内单向移动时,它将使轮140沿逆时针方向旋转,从而拉紧线中的第一根并使远侧尖端部分弯曲,使得其相对于操作部件100的主体在第一方向上成一定角度。当致动器60在槽70内沿相反方向移动时,它将使轮140沿顺时针方向旋转,从而拉紧线中的第二根并使远侧尖端部分弯曲,使得其相对于操作部件100的主体在第二相反方向上成一定角度。因此,当致动器60居中定位在槽70内时,远侧尖端部分与操作部件100的主体对齐,而不是成角度的。
95.应当理解,可以实施替代的已知致动机构来控制操作部件100的旋转和操作部件100的远侧尖端部分的关节运动。
96.图5中示出了一种用于控制操作部件100的旋转的这样的替代方案。在该替代实施方案中,内窥镜10包括轮160,其定位在头部部分40后面的槽内。在该实施方案中,头部部分40相对于本体部分20是固定的,并且,与之不同,轮160控制操作部件100的旋转移动。轮160可在头部部分40内旋转,并因此可相对于头部部分40和本体部分20旋转。
97.与图4所示的实施方案类似,操作部件100通过端口80插入并固定地接收在通道内,例如利用卡扣配合。该通道在端口80和轮160之间延伸穿过本体部分20和头部部分40,将轮160机械地连接到接收在其中的操作部件100。因此,轮160在头部部分40内的旋转引起通道120和操作部件100相对于本体部分20,即围绕操作部件100的纵向轴线的相应旋转。
98.因此,轮160沿逆时针方向旋转导致操作部件100沿逆时针方向旋转,并且轮160沿顺时针方向旋转导致操作部件100沿顺时针方向旋转。
99.类似于关于图4描述的实施方案,这种布置允许用户在头部部分40内旋转轮160,并从而旋转操作部件100,而不改变显示器50的取向,从而允许他们在使用中保持显示器的恒定视图,并从而保持患者气管的恒定视图。
100.用于控制操作部件的旋转和/或操作部件的远侧尖端部分的关节运动的其他替代致动机构可以包括,例如,容纳在本体部分20内的上述轮机构160,或类似于上述致动器60和槽70的附加致动布置,用于操作部件的旋转。
101.操作部件100在其远侧尖端,即在使用期间首先进入患者气管的操作部件100的端部处包括诸如led的光源。光源用于照亮患者的内表面,从其获得传输到显示装置的图像。操作部件100包括一个或多个光导,例如光纤,其从本体部分20延伸到操作部件100的远侧端部,通过这些光导将图像中继到显示装置。
102.操作部件100的远侧尖端部分包括用于将图像转换成电子格式的图像传感器,其设置在操作部件100的远侧端部。图像可以是单一图像或视频的形式。这些图像被中继到显示屏50并由显示屏50显示。图像可以通过穿过操作部件100以及本体和臂部分20、30到显示屏50的有线连接以电子格式传输到显示屏50。
103.操作部件100的远侧尖端是可成形的,例如通过弯曲。特别地,操作部件100的远侧尖端是可延展的,使得其可以如上所述相对于操作部件100的主要部分弯曲。
104.显示部分50和其中的显示屏基本上是方形的。显示部分50相对于本体部分20的竖直轴线倾斜,使得显示屏相对于本体部分20的竖直轴线略微向上倾斜。这使得当操作者正在使用内窥镜10时更容易观看显示屏。
105.在使用中,将操作部件100插入气管内导管中以对气管进行成像。然后将内窥镜10和气管内导管引入气管中,使得气管内导管的远侧端部位于气管内,并且气管内导管的近侧端部从患者口中伸出。当操作部件100将图像传输到显示屏50时,用户可以看到内窥镜10何时穿过患者的气管,并且由于气管内导管预装在内窥镜10上,因此将知道气管内导管何时穿过患者的气管。操作部件100的远侧尖端部分的位置由用户使用致动器60和可旋转头部部分40控制,从而适当地引导内窥镜10和气管内导管,并且显示屏50提供插入过程中的身体图像,以促进气管内导管的这种引导。一旦气管内导管的远侧端部适当地定位在气管内,则操作部件100连同喉镜一起被撤回。
106.替代地,在气管内导管未预加载到内窥镜10上的情况下,内窥镜10可以正好定位在气管外部,以便在插入气管内导管时对气管进行成像。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。