技术特征:
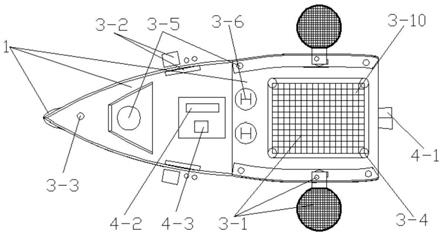
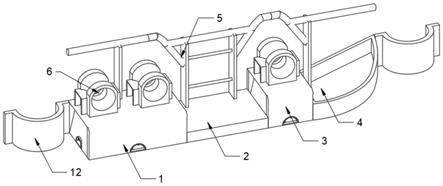
1.一种带有柔性t型翼的三体救援无人艇,其特征在于:包括三体艇体(1)、柔性t型翼减摇装置(2)、综合集成救援系统(3)、操控系统(4),三体艇体(1)的首部和尾部的外侧上分别安装有柔性t型翼减摇装置(2),综合集成救援系统(3)安装于三体艇体(1)的顶部,操控系统(4)包括喷水推进器(4-1)、能源舱(4-2)、控制器(4-3),喷水推进器(4-1)安装于三体艇体(1)的尾部,能源舱(4-2)、控制器(4-3)集成安装于三体艇体(1)的顶部,柔性t型翼减摇装置(2)、综合集成救援系统(3)、喷水推进器(4-1)、能源舱(4-2)分别与控制器(4-3)信号连接。2.根据权利要求1所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:三体艇体(1)包括小水线面主艇体(1-1)、常规细长型侧体(1-2)和连接甲板(1-3),小水线面主艇体(1-1)包括潜体和支柱,支柱在潜体上沿其横向间隔安装有两个,连接甲板(1-3)安装于两个支柱的顶面上,连接甲板(1-3)的纵向相对两侧分别安装有常规细长型侧体(1-2),两个支柱的相背一侧方分别设有柔性t型翼减摇装置(2),柔性t型翼减摇装置(2)安装于潜体上部,喷水推进器(4-1)安装于潜体尾部,综合集成救援系统(3)、能源舱(4-2)、控制器(4-3)分别安装于连接甲板(1-3)上。3.根据权利要求2所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:三体艇体(1)的总长为20~30m,长宽比为3.5~5,支柱呈细长对称翼型,支柱长度为三体艇体(1)总长的1/7~1/6倍,宽度为支柱长度的1/9~1/7倍,高度为支柱长度的1.5~2.5倍,第一个支柱位于三体艇体(1)艏段向后1/4~1/6艇长的位置,第二个支柱位于三体艇体(1)艏段向后3/4—5/6艇长的位置,常规细长型侧体(1-2)为圆舭型细长艇体,其长宽比为11~13,连接甲板(1-3)分为首甲板和尾甲板。4.根据权利要求1所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:柔性t型翼减摇装置(2)包括垂直翼(2-1)、水平翼(2-2)、可调节角度的柔性襟翼(2-3)、双出轴步进电机(2-4),可调节角度的柔性襟翼(2-3)通过双出轴步进电机(2-4)安装于水平翼(2-2)的尾部,三者构成的整体与垂直翼(2-1)的上部连接,垂直翼(2-1)的下部与三体艇体(1)连接,双出轴步进电机(2-4)与控制器(4-3)信号连接。5.根据权利要求4所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:垂直翼(2-1)为naca0012翼型,弦长为水平翼(2-2)弦长的0.8~1倍,高度为三体艇体(1)艇长的8~12%,水平翼(2-2)为naca0012翼型,翼展为三体艇体(1)艇宽的90~100%,弦长为翼展的1/2~2/3,可调节角度的柔性襟翼(2-3)中的柔性翼面占其总面积的1/4~1/3。6.根据权利要求1所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:综合集成救援系统(3)包括远程自动捕捞装置(3-1)、远程自动投放装置(3-2)、远程对讲机(3-3)、电暖吹风机(3-4)、摄像头(3-5)、小型无人机(3-6),远程自动捕捞装置(3-1)设有两个,在三体艇体(1)后部的相对两侧对称设置,远程自动投放装置(3-2)在三体艇体(1)中部的相对两侧分别设有一个,远程对讲机(3-3)安装于三体艇体(1)前部的顶面上,电暖吹风机(3-4)通过螺栓安装于远程自动捕捞装置(3-1)上,三体艇体(1)上部的前端以及尾端的四周分别安装有摄像头(3-5),小型无人机(3-6)停泊在三体艇体(1)上表面的中部,远程自动捕捞装置(3-1)、远程自动投放装置(3-2)、摄像头(3-5)、小型无人机(3-6)分别与控制器(4-3)信号连接。7.根据权利要求6所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:远程自
动捕捞装置(3-1)包括步进电机(3-7)、螺杆步进电机(3-8)、捞网框架(3-9)、救生网垫(3-10),步进电机(3-7)安装在三体艇体(1)上,其电机轴与螺杆步进电机(3-8)的底座连接,捞网框架(3-9)与螺杆步进电机(3-8)的螺杆连接,捞网框架(3-9)由救生捕捞网和金属框架组成,救生网垫(3-10)为弹性的网垫,安装在三体艇体(1)的上表面,步进电机(3-7)、螺杆步进电机(3-8)分别与控制器(4-3)信号连接。8.根据权利要求6所述的一种带有柔性t型翼的三体救援无人艇,其特征在于:远程自动投放装置(3-2)包括舵机(3-11)、多锁道机械结构(3-12),舵机(3-11)安装在在三体艇体(1)上,多锁道机械结构(3-12)通过螺栓与舵机(3-11)连接,救生圈或救生筏通过绳索与多锁道机械结构(3-12)连接。9.一种权利要求1~8任一所述的带有柔性t型翼的三体救援无人艇的设计方法,其特征在于包括以下步骤:步骤一:设计变量:设无人艇的小水线面主艇体首段长度lh,中段长度lm,尾段长度la,支柱高度h,常规细长型侧体长度l1,宽度b1,三体艇体方形系数c
b
,吃水t,型深d,设计航速vs,螺旋桨直径dp,螺旋桨盘面比aeo,设计航速下的螺旋桨转速n,浮心纵向位置l
cb
,重心纵向位置xg,盘面比a
eo
,螺距比p
dp
,水平翼弦长l2,水平翼翼展l3,垂直翼弦长l4,垂直翼翼展l5,柔性襟翼弦长l6,柔性翼面面积a1;步骤二:建立目标函数:考虑无人艇采用了柔性t水翼,将柔性翼面产生的附加推力考虑到整个推力中,选用海军系数作为快速性目标函数,并设置目标函数值越大越好,因此:式中:δ——排水量;v
s
——设计航速;r
t
——总阻力;对于无人艇的操纵性,回转性指数k和稳定性衡准数c常作为检验三体艇操纵性优良的指标,将无因次化的k'和c'采用幂指数乘积的形式组合,则操纵性目标函数h(x2):式中:0<g
i
<1,g1*g2=1;对于救援方面,主要考虑有远程自动捕捞装置的步进电机的功能性θ1、螺杆步进电机的功能性θ2、捞网框架的结构强度φ1与救生网垫的结构强度φ2,远程自动投放装置舵机的功能性θ3和多锁道机械结构的结构强度φ3,远程对讲机的功能性θ4、电暖吹风机的功能性θ5、摄像头的功能性θ6以及小型无人机的功能性θ7,这些功能性与强度指标都是越大越好,构建f3(x)作为功能性目标函数,并且其值越大为性能最优,其表达式为:式中:0<ε
i
<1,ε1*ε2*ε3*ε4*ε5*ε6*ε7*ε8*ε9*ε
10
=1;在无人艇横摇运动中,横摇惯性半径作为判断无人艇横摇优劣的关键参数之一,将其作为无人艇横摇性能的判断标准十分合适,根据贝尔斯统计大量船舶耐波性提出的船舶耐波性指数r,其不仅可以用来判断船舶耐波性的优劣,而且还可以作为选择较佳耐波性船型
的标准,因此本文使用贝尔斯船舶耐波性指数r作为三体无人艇的耐波性目标函数:h4(x)=r=8.422 45.104c
wf
10.078c
ws-378.465(t/l) 1.273(c/l)-23.501c
vpf-15.875c
vps
式中:c
wf
为舯前水线面系数;c
ws
为舯后水线面系数;c/l指代表截止比;c
vpf
表三体艇舯前棱形系数;c
vps
代表三体艇舯后棱形系数;综合以上三个方面构建总目标函数h(x),表达式如下:式中:
技术总结
本发明公开了一种带有柔性T型翼的三体救援无人艇,包括三体艇体、柔性T型翼减摇装置、综合集成救援系统与操控系统。三体艇体由小水线面主艇体和常规细长型侧体组成,该主艇体首部与尾部的上方外布置有柔性T型翼减摇装置;三体艇体上方甲板布置有综合集成救援系统,可对落水人员进行远程综合化救援;操控系统包括喷水推进器、能源舱和控制器,其分别布置在主艇体的尾端以及三体艇体上方尾部甲板舱内,各装置均与控制器相连实现远程控制。并提供了其设计方法。本发明不仅改善了三体艇的阻力性能,而且在增加纵摇减摇效果的同时提供了附加推力,提高了其快速性和适航性,同时利用三体无人艇这一载体,可高效、安全的完成海上救援作业。作业。作业。
技术研发人员:张金程 杨松林 周庆恒 柯维顺
受保护的技术使用者:江苏科技大学
技术研发日:2022.01.12
技术公布日:2022/4/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。