1.本发明涉及水下机器人技术领域,尤其涉及的是一种基于局部流化机理的仿生掘进机器人。
背景技术:
2.水下作业,特别是与海底有关的作业一直是技术和工程领域的技术难题,特别是在海底进行掘进作业的同时能够完成锚定等多种作业,能在如水下电缆或管道的安装、海底资源如石油等的探索和开采等多个领域进行应用。水下机器人在这一领域得到了越来越广泛的应用,如水下无人航行器等勘察装备能够在海底挖掘同时在洋流中定位以采集海底生态及矿产资源样本,这些水下无人装备大多是自备能源,需要在复杂环境下执行作业,因此对于掘进时的能量消耗和锚泊定位的自主能力具有极高要求。而目前现有的水下掘进装备往往不具备自主功能,或者不能够完成自主定位和脱附,无法集成多种功能,在实际运用上有不小的局限性。
技术实现要素:
3.本发明的目的在于克服现有技术的不足,提供了一种基于局部流化机理的仿生掘进机器人,以实现在海底的自主掘进、自主锚定和自主脱附功能,满足复杂环境下自主作业的需求。
4.本发明是通过以下技术方案实现的:
5.一种基于局部流化机理的仿生掘进机器人,包括安装架,所述安装架上安装有主驱动部,主驱动部的输出端向下延伸并连接有执行部,通过主驱动部驱动整个执行部竖向升降;
6.所述执行部包括连接件、次驱动部、工作尖端、外壳组件,连接件固定安装在主驱动部的输出端上,次驱动部安装在连接件上,次驱动部的输出端竖直向下伸出外壳组件之下并与工作尖端相连接,外壳组件空套在次驱动部和连接件外围,外壳组件包括沿周向分布的多块弧形板,多块弧形板通过外围的至少一组弹性部件连接在一起,自然状态下,多块弧形板共同围成一个圆筒状外壳,连接件上设有第一组滑动支撑组件,第一组滑动支撑组件包括沿连接件周向分布的多个支撑滑块,每个支撑滑块沿着连接件的径向向外延伸,每块弧形板上开有与支撑滑块滑动配合的支撑滑动槽,次驱动部的输出端上固定有至少一个移动楔块件,每个移动楔块件沿周向设有多个移动楔形凸起,外壳组件内侧设有至少一组固定楔块件,每组固定楔块件包括沿外壳组件内侧周向分布的多个固定楔块,多个移动楔形凸起与多个固定楔块一一对应的呈斜面配合,通过次驱动部驱动工作尖端竖向升降,从而带动工作尖端以及移动楔块件竖向移动,在移动楔形凸起与固定楔块之间斜面配合的作用下,外壳组件的多个弧形板沿径向向外扩张或沿径向向内收拢。
7.作为上述机器人的优选方案,所述次驱动部的输出端上设有两个移动楔块件,两个移动楔块件分别为上下排布的上移动楔块件和下移动楔块件,下移动楔块件固定套装在
次驱动部的输出端上,上移动楔块件通过多根竖向连接杆与下移动楔块件固定连接,相应的,外壳组件内侧也设有上下排布的两组固定楔块件,上下两组固定楔块件分别上下两个移动楔块件一一对应。
8.作为上述机器人的优选方案,所述次驱动部上设有第二组滑动支撑组件,第二组滑动支撑组件与第一组滑动支撑组件的结构组成相同,且第二组滑动支撑组件位于第一组滑动支撑组件的下方。
9.作为上述机器人的优选方案,多块所述弧形板通过外围的上下两组弹性部件连接在一起。
10.作为上述机器人的优选方案,所述弧形板上的支撑滑动槽呈“凹”字形,所述支撑滑块外形与支撑滑动槽形状相吻合。
11.作为上述机器人的优选方案,所述弹性部件包括多段拉簧,每块弧形板外侧壁固定有螺钉,每段拉簧的两端分别固定在相邻的两块弧形板的螺钉上。
12.作为上述机器人的优选方案,所述主驱动部和次驱动部均为电动推杆。
13.作为上述机器人的优选方案,所述移动楔形凸起外壁中部设一条凸筋,固定楔块内壁中部开有一条凹槽,通过凸筋与凹槽滑动配合。
14.本发明相比现有技术具有以下优点:
15.本发明提供的一种基于局部流化机理的仿生掘进机器人,其通过主驱动部驱动整个执行部竖向升降,作为向下掘进或向上脱附的主驱动力;其执行部通过次驱动部驱动工作尖端以及移动楔块件竖向移动,在移动楔形凸起与固定楔块之间的斜面配合下,将轴向运动巧妙的转换为径向运动,从而带动外壳组件的多个弧形板沿径向向外扩张或沿径向向内收拢,这一运动会局部地搅动土壤,并在执行部周围形成一个流化区域,在流态化的而不是静态的土壤中移动,可以将执行部周围的移动阻力降低到其强度能力范围内,而且壳体组件整体呈圆筒状,可以形成均匀的局部流化,最大程度的提升了挖掘效率,同时减少了能量消耗,满足了在水下工作对于低能耗长续航的要求。总之,本发明通过外壳组件的径向扩张与径向收拢这一动作的重复进行,与主驱动部的运动配合,实现了在海底的自主掘进、自主锚定和自主脱附功能,智能集成了多种功能,满足了在复杂环境下自主作业的需求。
附图说明
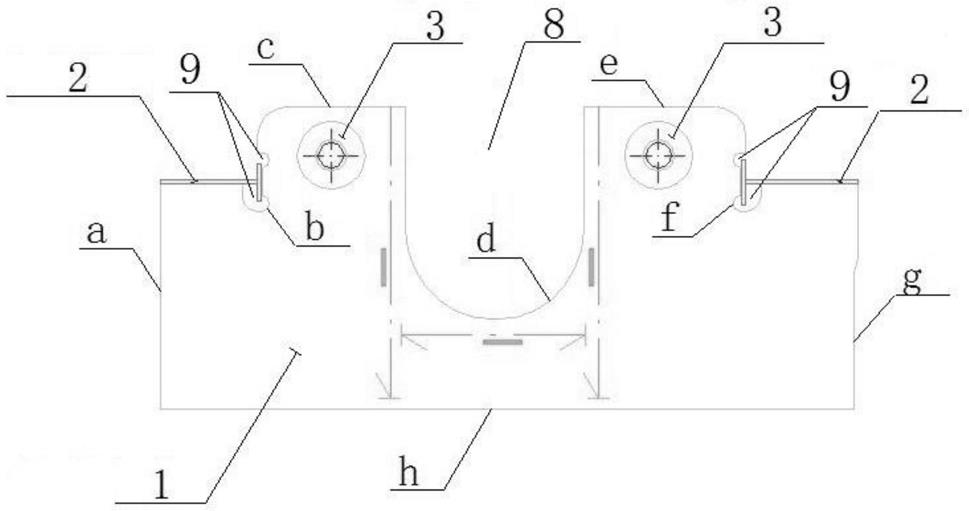
16.图1是本发明的主视图。
17.图2是本发明中主电动推杆与安装架的立体装配图。
18.图3是本发明中执行部的外壳组件收拢状态的立体图。
19.图4是本发明中执行部的外壳组件扩张状态的立体图。
20.图5是本发明中执行部除去外壳组件的立体图。
21.图6是本发明中单块弧形板的立体图。
22.图7是图5与图6装配的立体图。
23.图中标号:1安装架,2主电动推杆,3连接件,4工作尖端,5外壳组件,6次电动推杆,7弧形板,8拉簧,9螺钉,10支撑滑块,11支撑滑动槽,12上移动楔块件,13下移动楔块件,14移动楔形凸起,15固定楔块,16凸筋,17凹槽,18竖向连接杆。
具体实施方式
24.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
25.参见图1至图7,本实施例公开了一种基于局部流化机理的仿生掘进机器人,包括安装架1,安装架1上安装有主驱动部,主驱动部采用主电动推杆2,主电动推杆2安装在安装架1上,主电动推杆2的输出端向下延伸并连接有执行部,通过主电动推杆2驱动整个执行部竖向升降。
26.执行部包括连接件3、次驱动部、工作尖端4、外壳组件5,连接件3采用轴套结构,连接件3顶端固定安装在主电动推杆2的输出端上,次驱动部采用小型的次电动推杆6,次电动推杆6安装在连接件3内孔底端且向下伸出连接件3,次电动推杆6的输出端竖直向下伸出外壳组件5之下并与工作尖端4相连接,外壳组件5空套在次电动推杆6和连接件3外围。外壳组件5包括沿周向分布的多块弧形板7,多块弧形板7通过外围的至少一组弹性部件缠绕连接在一起,本实施例中,多块弧形板7通过外围的上下两组弹性部件连接在一起。每组弹性部件包括多段拉簧8,每块弧形板7外侧壁固定有螺钉9,每段拉簧8的两端分别固定在相邻的两块弧形板7的螺钉9上了;每段拉簧8的两端分别带有固定环,安装时,先将拉簧8端部的固定环套装在对应的螺钉9杆部上,再将螺钉9拧紧在弧形板7的螺纹孔中,即可实现拉簧8与弧形板7的固定安装。
27.自然状态下,多块弧形板7共同围成一个圆筒状外壳,连接件3上设有第一组滑动支撑组件,第一组滑动支撑组件包括沿连接件3周向分布的多个支撑滑块10,每个支撑滑块10沿着连接件3的径向向外延伸,每块弧形板7上开有与支撑滑块10滑动配合的支撑滑动槽11,弧形板7上的支撑滑动槽11呈“凹”字形,支撑滑块10外形与支撑滑动槽11形状相吻合,将支撑滑动槽11设计为“凹”字形,支撑滑块10横截面也呈“凹”字形,两者相互配合可形成多组导向筋条和导向凹槽,可对弧形板7的径向滑动进行更好的导向。次电动推杆6上设有第二组滑动支撑组件,第二组滑动支撑组件与第一组滑动支撑组件的结构组成相同,且第二组滑动支撑组件位于第一组滑动支撑组件的下方。通过两组滑动支撑组件对外壳组件5进行有效稳定的滑动支撑和导向,使得外壳组件5的各个弧形板7只能沿着径向滑动。
28.次电动推杆6的输出端上固定有至少一个移动楔块件,移动楔块件主体为一个圆环状,每个移动楔块件沿周向设有多个移动楔形凸起14,外壳组件5内侧设有至少一组固定楔块件,每组固定楔块件包括沿外壳组件5内侧周向分布的多个固定楔块15,多个移动楔形凸起14与多个固定楔块15一一对应的呈斜面配合。其中,移动楔形凸起14外壁中部设一条凸筋16,固定楔块15内壁中部开有一条凹槽17,通过凸筋16与凹槽17滑动配合形成一组导向配合件,可对固定楔块15与移动楔形凸起14之间进行更好的导向,防止两者错位,从而对外壳组件5与次电动推杆6的输出端之间的相对运动进行更好的导向,保证两者在正确的轨迹上相对运动。通过次电动推杆6驱动工作尖端4竖向升降,从而带动工作尖端4以及移动楔块件竖向移动,在移动楔形凸起14与固定楔块15之间斜面配合的作用下,外壳组件5的多个弧形板7沿径向向外扩张或沿径向向内收拢。
29.本实施例中,次电动推杆6的输出端上设有两个移动楔块件,两个移动楔块件分别为上下排布的上移动楔块件12和下移动楔块件13,下移动楔块件13固定套装在次电动推杆
6的输出端上,上移动楔块件12通过多根竖向连接杆18与下移动楔块件13固定连接,相应的,外壳组件5内侧也设有上下排布的两组固定楔块件,上下两组固定楔块件分别上下两个移动楔块件一一对应。设置两个移动楔块件分别与两组固定楔块件配合动作,能使得两者相对运动更顺畅。
30.本实施例提供的仿生掘进机器人的工作原理如下:
31.a、完成掘进作业
32.当机器人开始向下挖掘时,主电动推杆2启动,使得整个执行部向下推进,同时启动次电动推杆6,与次电动推杆6的输出端相连的工作尖端4也随之向下移动,与次电动推杆6的输出端固连的两个移动楔块件也随之向下移动,在两个移动楔块件向下移动的过程中,通过移动楔形凸起14与固定楔块15之间斜面配合的作用下,各个弧形板7沿径向向外移动,将外壳组件5撑开,当外壳组件5撑开到最大限度时,次电动推杆6反向运动,将工作尖端4、两个移动楔块件向上收回,在两组弹性部件的作用下,外壳组件5向内收拢到原位,这一扩张和收拢的运动会局部搅动土壤,并在执行部周围形成一个均匀的局部流化区域,这一区域表现得更像粘性液体而不是固体颗粒,执行部向下移动穿过这个区域时就像通过任何其他牛顿流体一样,阻力很小。这意味着机器人在向下掘进时只会存在一个与深度相关的恒定阻力,这样大大减小了挖掘时面临的阻力,提升了挖掘效率,减少了能量消耗。次电动推杆6在整个掘进过程中重复这一动作。
33.b、完成锚定作业
34.当执行部全部进去土壤中之后,启动次电动推杆6,通过移动楔块件与固定楔块件的运动配合,将外壳组件5撑开到最大限度,此时机器人与土壤里接触面积最大,有效增强了锚定力,大大提升了机器人的锚定效率。
35.c、完成自脱附作业
36.当机器人的执行部想要从土壤中脱附时,主电动推杆2反向运动将执行部向上拉,而次电动推杆6则重复在掘进过程时的动作,减小机器人在上升时面临的阻力,即可实现轻松脱附。
37.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。