1.本公开大体涉及一种智能制造装备产业,具体涉及一种具有多自由度的激光光束调节机构。
背景技术:
2.随着工业技术的不断革新,运用激光跟踪仪测量目标的位置和姿态已经成为了智能制造装备行业的一个重要方法。一般而言,激光具有亮度高、单色性好、相干性高且方向性强等多重优点,这些优点使得其运用在激光跟踪仪上时,激光跟踪仪能够获得良好的测量结果。
3.激光跟踪仪作为一种精密机械仪器,在测量目标位置和姿态时表现出不菲的成绩,一般的激光跟踪仪包括水平轴、俯仰轴和光轴,水平轴和俯仰轴相交垂直,光轴和俯仰轴相交垂直,通过旋转水平轴跟踪测量目标在水平方向上的位置及其变化,通过旋转俯仰轴跟踪测量目标在竖直方向上的位置及其变化,同时配合旋转水平轴和俯仰轴,旋转光轴可以跟踪测量目标在空间任一角度位置上的姿态及其变化。
4.然而,现有技术中,激光跟踪仪的水平轴、俯仰轴和光轴并不能严格的相交垂直,这会使激光跟踪仪(空间坐标和姿态测量)具有较大的误差,会降低激光跟踪仪的测量精度。
技术实现要素:
5.本公开是有鉴于上述现有技术的状况而提出的,其目的在于提供一种调节激光光束路径以使激光跟踪仪的水平轴、俯仰轴和光轴相交垂直的调节机构。
6.为此,本公开提供了一种具有多自由度的激光光束调节机构,是一种调整所述激光光束的路径以使激光跟踪仪的水平轴、俯仰轴和光轴相交垂直的调节机构,包括基座、可相对于所述基座沿第一方向移动的第一调节座、可相对于所述基座沿第二方向移动的第二调节座、调节所述激光光束的发射方向的第三调节座,所述第一方向与所述第二方向不同,所述第三调节座包括与所述第二调节座连接的连接构件、发射所述激光光束的出光构件、以及设置在所述连接构件和所述出光构件之间的弹性构件,所述出光构件与所述连接构件通过多个螺钉连接,并通过所述螺钉调整所述激光光束的发射方向。
7.在这种情况下,能够通过第一调节座和第二调节座调节激光光束的出射位置,通过第三调节座上的多个螺钉调节激光光束的出射方向,在利用上述多个调节座调节激光光束时,使激光跟踪仪的水平轴和俯仰轴相交垂直,通过激光跟踪仪测量激光光束出射的空间位置进而判断调节机构是否调节到位,以使水平轴、俯仰轴和光轴的位置处于相交垂直的状态,当多个轴相互相交垂直,提高激光跟踪仪测量的精确性,进而能够提高测量的精确度。
8.另外,在本公开所涉及的调节机构中,可选地,所述第一调节座可滑动地安装于所述基座,所述第一调节座包括固定所述第一调节座与所述基座的相对位置的第一固定构
件,所述第二调节座可滑动地安装于所述第一调节座,所述第二调节座包括固定所述第二调节座与所述第一调节座的相对位置的第二固定构件。在这种情况下,当第一调节座和第二调节座调节完毕,可以分别使用第一固定构件和第二固定构件固定第一调节座和第二调节座,不会因为调节机构的运动而导致调节座再次滑动进而出现较大的误差。
9.另外,在本公开所涉及的调节机构中,可选地,还包括用于反射所述激光光束的多个镜片,所述基座、所述第一调节座、以及所述第二调节座分别具有连通的穿孔,所述激光光束通过所述穿孔经由所述镜片反射之后通过所述出光孔。由此,能够使激光光束穿过通孔射出调节机构。
10.另外,在本公开所涉及的调节机构中,可选地,所述出光构件包括多个与所述多个螺钉的大小相匹配的通孔,所述连接构件包括多个与所述多个螺钉的大小相匹配的第一凹槽,所述通孔的数量大于所述第一凹槽的数量,所述第一凹槽具有与所述螺钉相匹配的螺纹。在这种情况下,多个螺钉可以通过通孔与第一凹槽相配合以将出光构件固定于连接构件上。
11.另外,在本公开所涉及的调节机构中,可选地,所述多个螺钉包括多个第一螺钉和多个第二螺钉,所述通孔的数量不小于所述第一螺钉的数量与所述第二螺钉的数量的和,所述第一凹槽的数量不小于所述第二螺钉的数量。由此,能够较方便的调整第一螺钉和第二螺钉以使出光构件与连接构件之间的接触达到平衡。
12.另外,在本公开所涉及的调节机构中,可选地,所述第一螺钉和所述第二螺钉依次相间并以环绕所述激光光束的方式设置于所述出光构件,所述第一螺钉通过所述通孔到达所述连接构件的表面,所述第二螺钉通过所述通孔到达所述第一凹槽,所述第一螺钉为顶丝。在这种情况下,通过第二螺钉和第一凹槽相配合可以拉住出光构件,第一螺钉可以顶住出光构件,同时调整第一螺钉和第二螺钉可以使出光构件和连接构件之间的受力达到平衡。
13.另外,在本公开所涉及的调节机构中,可选地,所述弹性构件为o型橡胶圈。在这种情况下,由于o型橡胶圈具有较好的弹性,能够通过压缩或舒张橡胶圈调节出光构架和出光构件之间的接触状态。
14.另外,在本公开所涉及的调节机构中,可选地,在所述连接构件的靠近所述出光构件的表面形成有与所述弹性构件相匹配的第二凹槽,所述弹性构件设置于所述第二凹槽,所述第二凹槽的深度小于所述弹性构件的厚度。在这种情况下,出光构件和连接构件之间具有可调节的宽度,调节宽度为弹性构件设置于第二凹槽时,弹性构件超出第二凹槽的深度的部分的厚度。
15.另外,在本公开所涉及的调节机构中,可选地,所述出光构件与产生所述激光光束的激光器连接,所述激光光束在所述激光器产生后通过所述出光构件进入所述调节机构。由此,能够通过调节机构接收激光器产生的激光并对激光光束的路径进行调节。
16.另外,在本公开所涉及的调节机构中,可选地,所述第一方向与所述第二方向垂直。在这种情况下,第一调节座和第二调节座可以在相互垂直的方向上进行滑动进而调整激光光束的出射点。
17.根据本公开的具有多自由度的激光光束调节机构,可以使得激光跟踪仪的水平轴、俯仰轴和光轴相互相交垂直进而能够提高激光跟踪仪测量的精确性。
附图说明
18.现在将仅通过参考附图的例子进一步详细地解释本公开,其中:
19.图1是示出了本公开实施方式所涉及的激光跟踪仪的拆解示意图。
20.图2是示出了本公开实施方式所涉及的调节机构的光束路径示意图。
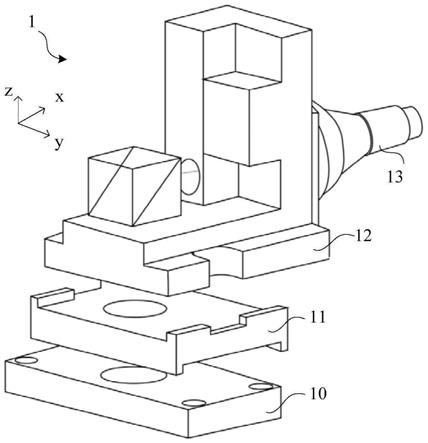
21.图3是示出了本公开实施方式所涉及的调节机构的整体结构图。
22.图4是示出了本公开实施方式所涉及的调节机构的第三调节座的安装前的示意图。
23.图5是示出了本公开实施方式所涉及的调节机构的第三调节座的安装后的示意图。
24.图6是示出了本公开实施方式所涉及的调节机构调节光束的调整示意图。
25.图7是示出了本公开实施方式所涉及的调节机构调整的步骤图。
26.附图标记:
27.200
…
激光跟踪仪,210
…
功能壳体,
[0028]1…
调节机构,
[0029]
10
…
基座,11
…
第一调节座,12
…
第二调节座,
[0030]
13
…
第三调节座,130
…
连接构件,131
…
出光构件,132
…
弹性构件,
[0031]
130a
…
第一凹槽,130b
…
第二凹槽,
[0032]a…
第一螺钉,b
…
第二螺钉,
[0033]
a1
…
水平轴,a2
…
俯仰轴,a3
…
光轴。
具体实施方式
[0034]
以下,参考附图,详细地说明本公开的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
[0035]
需要说明的是,本公开中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
[0036]
另外,在本公开的下面描述中涉及的小标题等并不是为了限制本公开的内容或范围,其仅仅是作为阅读的提示作用。这样的小标题既不能理解为用于分割文章的内容,也不应将小标题下的内容仅仅限制在小标题的范围内。
[0037]
本公开的实施方式涉及一种具有多自由度的激光光束调节机构,一种调整所述激光光束的路径以使激光跟踪仪的水平轴、俯仰轴和光轴相交垂直的调节机构,且用于对激光跟踪仪发出的光束进行调节。调节机构具有多个自由度可以表示相对于一个坐标系,调节机构可以具有多种运动状态。调节激光光束调节机构可以简称为“调光机构”、“调节机构”或“调节装置”等等。以下简称为调节机构。通过本公开所涉及的调节机构,能够提高激光跟踪仪测量的精确度。
[0038]
图1是示出了本公开实施方式所涉及的激光跟踪仪200的拆解示意图。图2是示出了本公开实施方式所涉及的调节机构1的光束路径示意图。
[0039]
在一些示例中,激光跟踪仪200是一种具有空间坐标和姿态测量的精密仪器。优选地,在一些示例中,在利用激光跟踪仪200对目标进行位置测量的时候,不仅需要保持水平轴a1与俯仰轴a2水平相交垂直,还需要保持沿着光轴a3出射激光的光束方向与俯仰轴a2相交垂直并和水平轴a1相交。在这种情况下,通过激光跟踪仪200测量目标,能够得到高精度的测量结果。
[0040]
如图1所示,激光跟踪仪200具有水平轴a1、俯仰轴a2和光轴a3。在一些示例中,光轴a3可以表示为激光光束从激光跟踪仪200出射时光束的延伸方向。激光跟踪仪200包括功能壳体210。在一些示例中,功能壳体210中可以设置有调节结构1。在一些示例中,激光光光束可以经由激光器发射后进入调节机构1,并经由调节机构1调节,然后再从功能壳体210的激光出射口射出。以下,功能壳体210的激光出射口均简称为激光出射口。
[0041]
在一些示例中,激光从出射口出射时,优选地,可以垂直出射。在一些示例中,水平轴a1和俯仰轴a2相交垂直。在一些示例中,光轴a3和俯仰轴a2相交垂直并和水平轴a1相交。在这种情况下,能够提高激光跟踪仪200测量的精确度。
[0042]
在一些示例中,当光轴a3和水平轴a1没有相交垂直,也即当激光从出射口没有垂直于水平轴a1出射时,利用激光跟踪仪200测量远距离处的物体,将会使激光跟踪仪200出现较大的测量误差。在一些示例中,当光轴a3的出射方向没有和水平轴a1垂直,例如存在0.1
°
甚至更大的角度偏差时,如果激光跟踪仪200测量的是2km的距离,则测量结果可能会出现3m的误差,激光跟踪仪200的测量精确度大大降低。在这种情况下,通过调节光轴a3以使其分别和水平轴a1、俯仰轴相交垂直,可以提高激光跟踪仪200测量的精确度。
[0043]
图3是示出了本公开实施方式所涉及的调节机构1的整体结构图。
[0044]
在一些示例中,调节机构1可以包括基座10、第一调节座11。第二调节座12、以及第三调节座13。在一些示例中,第一调节座11可以相对于基座10移动,第二调节座12可以相对于第一调节座11移动。由此,能够通过移动第一调节座11或第二调节座12改变基座10上的构件的空间位置。
[0045]
在一些示例中,第一调节座11可以沿着第一方向移动,第二调节座12可以沿着第二方向移动。在一些示例中,第一方向和第二方向可以不同。由此,能够在不同方向上移动第一调节座11和第二调节座12进而调节激光光路的出射位置是否垂直于俯仰轴a2并相交于水平轴a1。
[0046]
在一些示例中,第三调节座13可以包括连接构件130、出光构件131、以及弹性构件132。在一些示例中,可以通过连接构件130将第三调节座13连接于第二调节座12。在一些示例中,出光构件131可以用于发射激光光束进入调节机构1。在一些示例中,弹性构件132可以设置在连接构件130和出光构件131之间。在这种情况下,可以通过改变弹性构件132的挤压状态进而改变连接构件130和出光构件131之间的具体的连接状态。
[0047]
在一些示例中,可以通过多个螺钉连接出光构件131和连接构件130。在一些示例中,可以通过调整螺钉调整激光光束的发射方向。具体而言,当调整螺钉的松紧时,可以改变出光构件131和连接构件130之间的弹性构件132的挤压状态,进而可以改变出光构件131相对于连接构件130的角度进而调整激光光束的发射方向。
[0048]
在一些示例中,可以通过螺栓以将连接构件130固定于第二调节座12,进而将第三调节座13固定于第二调节座12。在这种情况下,当第一调节座11或第二调节座12移动的时
候,第三调节座13可以跟随第一调节座11或第二调节座12的移动而改变其空间位置。
[0049]
如上所述,在一些示例中,第一方向和第二方向可以不同。在一些示例中,当第一调节座11沿第一方向移动,同时第二调节座12沿第二方向移动时,第三调节座13可以随着在第一方向或第二方向上相对于基座10具有空间上的不同的位置变化。在这种情况下,当出光构件131发射激光,可以同时调节多个调节座调整激光的发射角度或激光的发射位置。
[0050]
在一些示例中,第一方向可以和第二方向垂直。在一些示例中,第一方向可以为x方向,第二方向可以为y方向。在这种情况下,x方向和y方向可以形成坐标系,当第一调节座11和第二调节座12滑动时,能够在坐标系上模拟调节座的滑动轨迹。由此,能够使得调节座的调节变得方便,同时,也能够准确的通过坐标系记录第一调节座11和第二调节座12的滑动距离(调节距离)。
[0051]
在一些示例中,第一调节座可以11安装于基座10,第二调节座12可以安装于第一调节座11。在一些示例中,第一调节座11可以在基座10上滑动,第二调节座12可以在第一调节座11上滑动。由此,能够滑动第一调节座11和第二调节座12进而改变出光构件131发射激光光束的相对位置。
[0052]
在一些示例中,第一调节座11包括第一固定构件(未图示)。在一些示例中,当第一调节座11调整完成,可以通过第一固定构件固定第一调节座11。由此,能够固定第一调节座11和基座10的相对位置。在一些示例中,第二调节座12包括第二固定构件(未图示)。在一些示例中,当第二调节座12调整完成,可以通过第二固定构件固定第二调节座12。由此,能够固定第二调节座12和第一调节座11的相对位置。在这种情况下,当调节机构1运动时,可以减少各调节座的不期望的移动,进而提高测量的精确度。
[0053]
在一些示例中,调节机构1还包括多个镜片。在一些示例中,镜片可以用于反射激光光束。由此,能够观察从调节机构1内部经由镜片发射的激光光束的位置,进而判断调节机构1是否调整成功。
[0054]
在一些示例中,镜片的数量至少为2个。在一些示例中,镜片可以为平面反射镜、分光镜或任意能够平面反射光束的镜片。
[0055]
在一些示例中,基座10、第一调节座11、以及第二调节座12分别具有穿孔(未图示),上述穿孔可以连通。在一些示例中,连接构件130可以具有穿孔(未图示)。在一些示例中,当激光光束从出光构件131进入调节机构1时,激光光束可以通过多个穿孔并经由镜片反射之后射出调节机构1。
[0056]
图4是示出了本公开实施方式所涉及的调节机构1的第三调节座13的安装前的示意图。图5是示出了本公开实施方式所涉及的调节机构1的第三调节座13的安装后的示意图。
[0057]
如图4所示,出光构件131和连接构件130之间可以设置有弹性构件132(稍后描述)。在一些示例中,出光构件131可以包括多个通孔。如上所述,出光构件131和连接构件130之间可以通过多个螺钉连接。在一些示例中,多个通孔可以和多个螺钉的大小相匹配。由此,能够使螺钉通过通孔以连接出光构件131和连接构件130。
[0058]
在一些示例中,连接构件130可以包括多个第一凹槽130a,多个第一凹槽130a可以和多个螺钉的大小相匹配。在一些示例中,通孔的数量可以大于第一凹槽130a的数量。在一些示例中,第一凹槽130a的螺纹可以和螺钉相匹配。由此,能够将第一凹槽130a和螺钉配合
固定出光构件131。
[0059]
在一些示例中,多个螺钉包括多个第一螺钉a和多个第二螺钉b。在一些示例中,通孔的数量不小于第一螺钉a和第二螺钉b数量的总和。在一些示例中,第一凹槽130a的数量不小于第一螺钉a的数量。在这种情况下,当第一螺钉a和第一凹槽130a配合时,可以固定每个第一螺钉a。
[0060]
在一些示例中,第一螺钉a和第二螺钉b可以设置于出光构件131。在一些示例中,第一螺钉a和第二螺钉b可以依次相间并环绕激光光束。在一些示例中,第一螺钉a可以通过通孔到达连接构件130的表面。在一些示例中,第二螺钉b可以通过通孔到达第一凹槽130a。
[0061]
在一些示例中,第一螺钉a可以为顶丝。在一些示例中,顶丝可以以环绕激光光束的方式设置于出光构件131。在这种情况下,可以在连接构件130的周向较好的固定出光构件131。另外,第一螺钉a可以和通孔配合顶住出光构件131。由此,当旋转顶丝的时候,连接构件130和出光构件131之间的距离可以随着顶丝的旋转发生变化,进而可以调节连接构件130和出光构件之间由顶丝连接的部位的松紧程度。
[0062]
如上所述,在一些示例中,可以在连接构件130和出光构件131之间设置弹性构件132。在一些示例中,当连接构件130和出光构件131之间的距离变化时,弹性构件132和连接构件130之间的连接关系、以及弹性构件132和出光构件131之间的连接关系发生同步变化。
[0063]
在一些示例中,第二螺钉b可以通过通孔到达第一凹槽130a。第二通孔可以和第一凹槽130a相配合将出光构件131经由弹性构件132固定于连接构件130上。在一些示例中,当第二螺钉b被拧紧或拧松时,弹性构件132可以压缩或舒张,出光构件131和连接构件130之间可以密切接触或轻微接触。在这种情况下,可以同时调整第一螺钉a和第二螺钉b拧入通孔的深度以使出光构件131与弹性构件132之间接触受力达到平衡。由此,能够将出光构件131平稳的设置于弹性构件132上。
[0064]
在一些示例中,弹性构件132可以为o型橡胶圈。由于o型橡胶圈具有较好的弹性,在这种情况下,能够通过压缩或舒张橡胶圈调节连接构架和出光构件131之间的接触状态。
[0065]
在一些示例中,在连接构件130设置有第二凹槽130b。在一些示例中,第二凹槽130b可以设置于靠近出光构件131的表面。在一些示例中,第二凹槽130b的形状可以和弹性构件132的形状大致相匹配。由此,能够将弹性构件132设置于第二凹槽130b。
[0066]
在一些示例中,第二凹槽130b的深度可以小于弹性构件132的厚度。在一些示例中,当弹性构件132设置于第二凹槽130b时,弹性构件132超出第二凹槽130b的深度的部分的厚度可以作为出光构件131和连接构件130之间的调节宽度。由此,能够调节第一螺钉a和第二螺钉b拧入出光构件131的深度进而调节上述调节宽度。
[0067]
在一些示例中,第一螺钉a和第二螺钉b可以均匀地分布于出光构件131的周围。
[0068]
在一些示例中,出光构件131可以和激光器连接。在一些示例中,激光器可以产生激光光束,激光光束通过出光构件131进入调节机构1。由此,能够通过调节机构1接收激光器产生的激光并对激光光束的路径进行调节。
[0069]
在一些示例中,可以调节激光跟踪仪以使俯仰轴与水平轴交且互相垂直、并且调节激光跟踪仪以使俯仰轴与光轴交且互相垂直,激光跟踪仪发射激光并经由调节机构。在一些示例中,可以通过驱动激光跟踪仪驱动激光跟踪仪围绕水平轴旋转预设角度并测量激光光束形成的图案,并基于图案的范围调整调节机构以使图案小于预设值。在一些示例中,
图案越小,可以表示调节机构的调节的精确度越高。
[0070]
图6是示出了本公开实施方式所涉及的调节机构1调节光束的调整示意图。图7是示出了本公开实施方式所涉及的调节机构1调整的步骤图。
[0071]
在一些示例中,调整调节机构1的步骤可以包括:调节水平轴a1和俯仰轴a2(步骤s10);发射激光(步骤s20);画出光束的轨迹(步骤s30);调整调节座(步骤s40)。
[0072]
在一些示例中,在步骤s10中,可以调节激光跟踪仪200的旋转轴,在一些示例中,可以调节水平轴a1和俯仰轴a2相交垂直。
[0073]
在一些示例中,在步骤s20中,可以调节激光跟踪仪200激光出射口垂直向上,当激光跟踪仪200的激光器发射激光光束时,光束可以经由激光器进入调节机构1然后从激光出射口射出。
[0074]
在一些示例中,在步骤s30中,可以旋转激光跟踪仪200的水平轴a1使激光跟踪仪200沿着水平方向旋转预定角度,激光光束随着激光跟踪仪200旋转预定角度,在出射口画出激光光束的运动轨迹,激光光束在距离出射口的多处高度上(距离激光出射口不同的高度)会形成具有特定的形状的轨迹。在一些示例中,形成的特定形状的面积越小,调节机构1的测量精度越高。在这种情况下,当形成的具有特定的形状的面积比较大时,若没有及时调节激光光束的角度和方向使特定的形状的面积小于预设值,并继续使用激光跟踪仪200测量跟踪目标,容易带来较大的测量误差。
[0075]
在一些示例中,在步骤s40中,当发现激光光束在距离出射口的不同的高度形成具有特定形状的轨迹时,可以同时调节多个调节座直至特定的形状的面积越小直至小于预设值,此时调节完毕。在这种情况下,通过激光跟踪仪200测量目标,能够具有较高的精确度。
[0076]
在一些示例中,调节过程中可以不断的滑动第一调节座11和第二调节座12,并调节第三调节上的第一螺钉a和第二螺钉b以调节激光光束的路径,使得光轴a3(也即从出射口出射的光束的延伸方向)和俯仰轴a2都相交垂直并和水平轴a1相交,当调节完毕时,固定第一调节座11、第二调节座12、以及第三调节座13。
[0077]
虽然以上结合附图和示例对本公开进行了具体说明,但是可以理解,上述说明不以任何形式限制本公开。本领域技术人员在不偏离本公开的实质精神和范围的情况下可以根据需要对本公开进行变形和变化,这些变形和变化均落入本公开的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。